







1.软件版本
matlab2013b
2.本算法理论知识
首先进行一级环形倒立摆的建模过程如下所示:
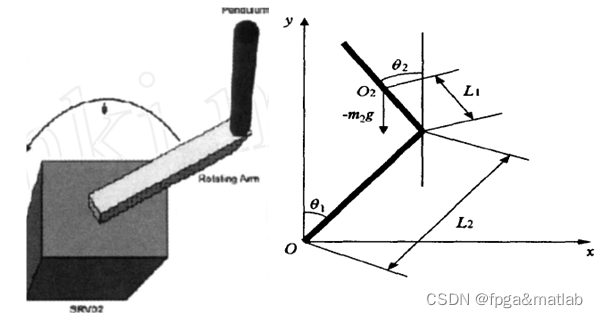
该次设计所研究的旋转倒立摆系统模型如图1所示,倒立摆模块由倒立摆的摆杆和一个支撑摆杆的旋转臂组成,摆杆固定在旋转臂一端,可以在垂直于转臂的方向上做360度的转动。旋臂的另一端安装在一个旋转伺服装置上,伺服装置通过电机驱动齿轮转动来实现旋臂在水平面内做360度的旋转。在摆杆的底端以及旋臂的里端均装有光电编码器,用来检测角度的变化并将信号传送给计算机。
涉及到的参数有:

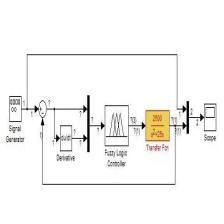
整个一级倒立摆的控制对象建模过如下所示:

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 4276
4276











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











