







1、主要参考
(1)最主要参考,官方的blog
Make fragments — Open3D 0.16.0 documentation
(2)操作流程参考
(3)blog
Open3d利用彩色图和深度图生成点云进行室内三维重建_两车面包人的博客-CSDN博客_生成的点云没有颜色
(4)数据集来源
ICL-NUIM RGB-D Benchmark Dataset
2、使用open3d提供的官方例子重建三维
2.1进入如下目录
C:\Users\Administrator\AppData\Local\Programs\Python\Python39\Lib\site-packages\open3d\examples\reconstruction_system
2.2运行如下指令
python run_system.py --default_dataset lounge --make --register --refine --integrate
或者
python run_system.py --default_dataset bedroom --make --register --refine --integrate
或者
python run_system.py --default_dataset jack_jack --make --register --refine --integrate(2)其中bedroom可以手动下载,地址
https://github.com/isl-org/open3d_downloads/releases/download/20220301-data/bedroom01.zip
2.3实际操作注意
(3)注意,操作方法和下面的相同
注意:(1)先按照4.2.1步骤修改好json文件
然后操作以下四步即可!!!:
python run_system.py --config config/tutorial_chen_iclnuim.json --make python run_system.py --config config/tutorial_chen_iclnuim.json --register python run_system.py --config config/tutorial_chen_iclnuim.json --refine python run_system.py --config config/tutorial_chen_iclnuim.json --integrate
该tutorial_chen_iclnuim.json的内容如下:
{
"name": "Open3D reconstruction tutorial http://open3d.org/docs/release/tutorial/reconstruction_system/system_overview.html",
"path_dataset": "D:/RGBD_CAMERA/bedroom01",
"path_intrinsic": "",
"depth_max": 3.0,
"voxel_size": 0.05,
"depth_diff_max": 0.07,
"preference_loop_closure_odometry": 0.1,
"preference_loop_closure_registration": 5.0,
"tsdf_cubic_size": 3.0,
"icp_method": "color",
"global_registration": "ransac",
"python_multi_threading": true
}
(4)拼接结果
2.4试试自己的数据
(1)使用前面教程的方法获取自己的数据集
(17)深度点云学习--python安装openni打开奥比中光RGBD_chencaw的博客-CSDN博客
(2)具体保存例子如下

---------------------------------------------
-------下面的步骤都是OK的,就是使用该数据集运算过程中出了问题!
--------------------------------------------------------------------
3、其它详细操作--下载指定数据集
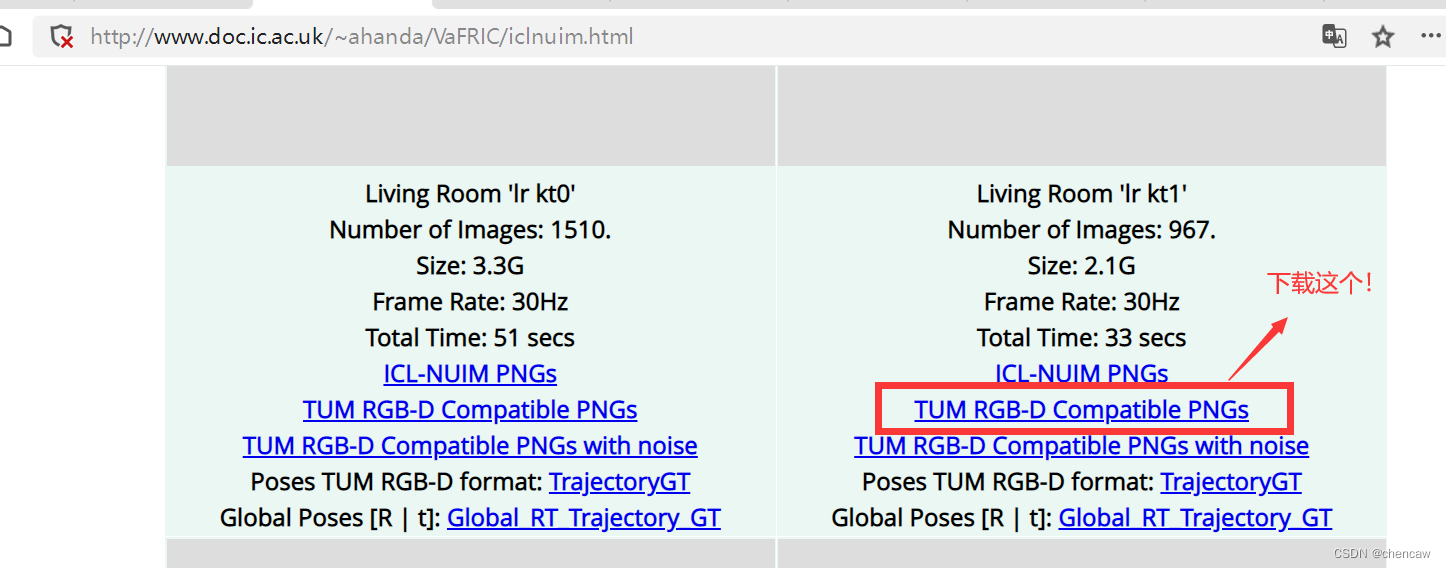
3.1 下载数据
(1)网址
ICL-NUIM RGB-D Benchmark Dataset
(2)下载的位置
 (3)下载后解压文件
(3)下载后解压文件
1)发现主要由2个文件夹构成

2)总文件数996
3)RGB图的内容如下
4)深度图的内容如下
3.2相机参数
(1)网址
ICL-NUIM RGB-D Benchmark Dataset
(2)参数

| 481.20, | 0, | 319.50 |
| 0, | -480.00, | 239.50 |
| 0, | 0, | 1 |
4、基于open3d的RGBD图三维重建
4.1到你安装的open3d的目录下
(1)到安装目录的examples\reconstruction_system文件下
我的是默认安装,位置如下:
C:\Users\Administrator\AppData\Local\Programs\Python\Python39\Lib\site-packages\open3d\examples\reconstruction_system
4.2Make fragments(创建片段)
注意:(1)先按照3.2.1步骤修改好json文件
然后操作以下四步即可!!!:
python run_system.py --config config/tutorial_chen_iclnuim.json --make python run_system.py --config config/tutorial_chen_iclnuim.json --register python run_system.py --config config/tutorial_chen_iclnuim.json --refine python run_system.py --config config/tutorial_chen_iclnuim.json --integrate
4.2.1操作
场景重建系统的第一步是从短RGBD序列中创建片段。
(1)输入参数
该脚本使用python run_system.py [config]——make运行。在[config]中,["path_dataset"]应该有image和depth子文件夹,分别存储彩色图像和深度图像。我们假设彩色图像和深度图像是同步和配准的。在[config]中,可选参数["path_intrinsic"]指定了存储相机固有矩阵的json文件的路径(详情请参阅Read camera intrinsic)。如果没有给出,则使用PrimeSense工厂设置。
(2)具体操作
复制修改config下面的tutorial.json为你的新的config

(3)具体内容修改了数据集的路径
{
"name": "Open3D reconstruction tutorial http://open3d.org/docs/release/tutorial/reconstruction_system/system_overview.html",
"path_dataset": "D:/RGBD_CAMERA/livingroom_dataset/living_room_traj1_frei_png",
"path_intrinsic": "",
"depth_max": 3.0,
"voxel_size": 0.05,
"depth_diff_max": 0.07,
"preference_loop_closure_odometry": 0.1,
"preference_loop_closure_registration": 5.0,
"tsdf_cubic_size": 3.0,
"icp_method": "color",
"global_registration": "ransac",
"python_multi_threading": true
}
(4)运行如下命令
python run_system.py --config config/tutorial_chen_iclnuim.json ——make4.2.2 涉及的主要函数
(1)Register RGBD image pairs
# examples/python/reconstruction_system/make_fragments.py
def register_one_rgbd_pair(s, t, color_files, depth_files, intrinsic,
with_opencv, config):
source_rgbd_image = read_rgbd_image(color_files[s], depth_files[s], True,
config)
target_rgbd_image = read_rgbd_image(color_files[t], depth_files[t], True,
config)
option = o3d.pipelines.odometry.OdometryOption()
option.depth_diff_max = config["depth_diff_max"]
if abs(s - t) != 1:
if with_opencv:
success_5pt, odo_init = pose_estimation(source_rgbd_image,
target_rgbd_image,
intrinsic, False)
if success_5pt:
[success, trans, info
] = o3d.pipelines.odometry.compute_rgbd_odometry(
source_rgbd_image, target_rgbd_image, intrinsic, odo_init,
o3d.pipelines.odometry.RGBDOdometryJacobianFromHybridTerm(),
option)
return [success, trans, info]
return [False, np.identity(4), np.identity(6)]
else:
odo_init = np.identity(4)
[success, trans, info] = o3d.pipelines.odometry.compute_rgbd_odometry(
source_rgbd_image, target_rgbd_image, intrinsic, odo_init,
o3d.pipelines.odometry.RGBDOdometryJacobianFromHybridTerm(), option)
return [success, trans, info]该函数读取一对RGBD图像,并将source_rgbd_image注册到target_rgbd_image。Open3D函数compute_rgbd_odometry被调用来对齐RGBD图像。对于相邻的RGBD图像,使用单位矩阵作为初始化。对于非相邻的RGBD图像,采用宽基线匹配作为初始化。特别地,函数pose_estimate计算OpenCV ORB特征来匹配宽基线图像上的稀疏特征,然后执行5点RANSAC来估计一个粗略的对齐,这被用作compute_rgbd_odometry的初始化。
(2)Multiway registration
# examples/python/reconstruction_system/make_fragments.py
def make_posegraph_for_fragment(path_dataset, sid, eid, color_files,
depth_files, fragment_id, n_fragments,
intrinsic, with_opencv, config):
o3d.utility.set_verbosity_level(o3d.utility.VerbosityLevel.Error)
pose_graph = o3d.pipelines.registration.PoseGraph()
trans_odometry = np.identity(4)
pose_graph.nodes.append(
o3d.pipelines.registration.PoseGraphNode(trans_odometry))
for s in range(sid, eid):
for t in range(s + 1, eid):
# odometry
if t == s + 1:
print(
"Fragment %03d / %03d :: RGBD matching between frame : %d and %d"
% (fragment_id, n_fragments - 1, s, t))
[success, trans,
info] = register_one_rgbd_pair(s, t, color_files, depth_files,
intrinsic, with_opencv, config)
trans_odometry = np.dot(trans, trans_odometry)
trans_odometry_inv = np.linalg.inv(trans_odometry)
pose_graph.nodes.append(
o3d.pipelines.registration.PoseGraphNode(
trans_odometry_inv))
pose_graph.edges.append(
o3d.pipelines.registration.PoseGraphEdge(s - sid,
t - sid,
trans,
info,
uncertain=False))
# keyframe loop closure
if s % config['n_keyframes_per_n_frame'] == 0 \
and t % config['n_keyframes_per_n_frame'] == 0:
print(
"Fragment %03d / %03d :: RGBD matching between frame : %d and %d"
% (fragment_id, n_fragments - 1, s, t))
[success, trans,
info] = register_one_rgbd_pair(s, t, color_files, depth_files,
intrinsic, with_opencv, config)
if success:
pose_graph.edges.append(
o3d.pipelines.registration.PoseGraphEdge(
s - sid, t - sid, trans, info, uncertain=True))
o3d.io.write_pose_graph(
join(path_dataset, config["template_fragment_posegraph"] % fragment_id),
pose_graph)此脚本使用Multi way注册中演示的技术。函数make_posegraph_for_fragment构建了一个用于该序列中所有RGBD图像的多路配准的姿态图。每个图节点代表一个RGBD图像及其姿态,它将几何图形转换为全局片段空间。为了提高效率,只使用关键帧。
一旦创建了一个姿态图,通过调用函数optimize_posegraph_for_fragment来执行多路注册
(3) optimize_posegraph_for_fragment
# examples/python/reconstruction_system/optimize_posegraph.py
def optimize_posegraph_for_fragment(path_dataset, fragment_id, config):
pose_graph_name = join(path_dataset,
config["template_fragment_posegraph"] % fragment_id)
pose_graph_optimized_name = join(
path_dataset,
config["template_fragment_posegraph_optimized"] % fragment_id)
run_posegraph_optimization(pose_graph_name, pose_graph_optimized_name,
max_correspondence_distance = config["depth_diff_max"],
preference_loop_closure = \
config["preference_loop_closure_odometry"])这个函数调用global_optimization来估计RGBD图像的姿态。
(4)Make a fragment
# examples/python/reconstruction_system/make_fragments.py
def integrate_rgb_frames_for_fragment(color_files, depth_files, fragment_id,
n_fragments, pose_graph_name, intrinsic,
config):
pose_graph = o3d.io.read_pose_graph(pose_graph_name)
volume = o3d.pipelines.integration.ScalableTSDFVolume(
voxel_length=config["tsdf_cubic_size"] / 512.0,
sdf_trunc=0.04,
color_type=o3d.pipelines.integration.TSDFVolumeColorType.RGB8)
for i in range(len(pose_graph.nodes)):
i_abs = fragment_id * config['n_frames_per_fragment'] + i
print(
"Fragment %03d / %03d :: integrate rgbd frame %d (%d of %d)." %
(fragment_id, n_fragments - 1, i_abs, i + 1, len(pose_graph.nodes)))
rgbd = read_rgbd_image(color_files[i_abs], depth_files[i_abs], False,
config)
pose = pose_graph.nodes[i].pose
volume.integrate(rgbd, intrinsic, np.linalg.inv(pose))
mesh = volume.extract_triangle_mesh()
mesh.compute_vertex_normals()
return mesh
一旦姿态估计出来,使用RGBD集成从每个RGBD序列中重建一个彩色片段。
(5)Batch processing
# examples/python/reconstruction_system/make_fragments.py
def run(config):
print("making fragments from RGBD sequence.")
make_clean_folder(join(config["path_dataset"], config["folder_fragment"]))
[color_files, depth_files] = get_rgbd_file_lists(config["path_dataset"])
n_files = len(color_files)
n_fragments = int(
math.ceil(float(n_files) / config['n_frames_per_fragment']))
if config["python_multi_threading"] is True:
from joblib import Parallel, delayed
import multiprocessing
import subprocess
MAX_THREAD = min(multiprocessing.cpu_count(), n_fragments)
Parallel(n_jobs=MAX_THREAD)(delayed(process_single_fragment)(
fragment_id, color_files, depth_files, n_files, n_fragments, config)
for fragment_id in range(n_fragments))
else:
for fragment_id in range(n_fragments):
process_single_fragment(fragment_id, color_files, depth_files,
n_files, n_fragments, config)main函数调用上面解释的每个单独的函数。
(6)结果

(7)以下是来自optimize_posegraph_for_fragment的日志

(8)以下是来自integrate_rgb_frames_for_fragment 的日志
3.3 Register fragments
一旦场景的片段(fragments)被创建,下一步就是在全局空间中对齐它们。
(1)主要操作方法
















 1748
1748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









