







ROS21讲命令行工具使用
1、在运行所有ROS程序前首先要运行的命令,启动rosmaster
roscore
启动完成
started core service [/rosout]
2、rosrun
允许你使用包名直接运行一个包内的节点(而不需要知道这个包的路径)
用法:再打开一个终端
rosls [ 本地包名称[/子目录] ]
示例:双击按tap键自动列出该功能包下的节点
chen@ubuntu:~$ rosrun turtlesim
draw_square mimic turtlesim_node turtle_teleop_key
chen@ubuntu:~$ rosrun turtlesim
2.1、运行第三仿真器节点
rosrun turtlesim turtlesim_node
回车后,打开仿真器界面,如下图
2.2 运行键盘控制节点
新建终端
rosrun turtlesim turtle_teleop_key
然后通过键盘,可以移动海龟。
3、显示系统计算图
rqt_graph

4、rosnode 显示当前的节点信息,输入后直接回车
4.1、
chen@ubuntu:~$ rosnode
rosnode is a command-line tool for printing information about ROS Nodes.
Commands:
rosnode ping test connectivity to node
rosnode list list active nodes
rosnode info print information about node
rosnode machine list nodes running on a particular machine or list machines
rosnode kill kill a running node
rosnode cleanup purge registration information of unreachable nodes
Type rosnode <command> -h for more detailed usage, e.g. 'rosnode ping -h'
4.2 显示三个节点,/rosout 是默认话题
chen@ubuntu:~$ rosnode list
/rosout
/teleop_turtle
/turtlesim
4.3 查看节点信息 /turtlesim
chen@ubuntu:~$ rosnode info /turtlesim
--------------------------------------------------------------------------------
Node [/turtlesim]
Publications:
* /rosout [rosgraph_msgs/Log]
* /turtle1/color_sensor [turtlesim/Color]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/cmd_vel [geometry_msgs/Twist]
Services:
5.话题
5.1 rostopic,直接回车
chen@ubuntu:~$ rostopic
rostopic is a command-line tool for printing information about ROS Topics.
5.2 话题列表
chen@ubuntu:~$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
5.3 通过命令行,让海龟移动
例子:
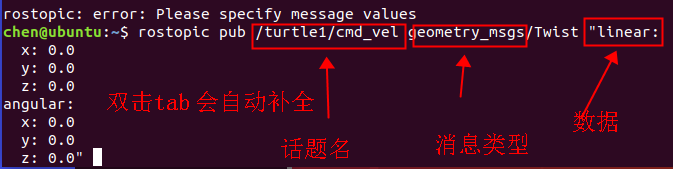
chen@ubuntu:~$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist “linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0”
5.4、设定线速度和角速度,pub指令只会发布一次,想要连续运动需要给循环,-r频率,10
chen@ubuntu:~$ rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 1.0
z: 0.0"
旋转Z向,垂直于电脑平面上,X方向海龟头方向。
6、查看消息数据结构,写入到Twist后按tab键补全
chen@ubuntu:~$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
上面显示发布指令的含义,线速度,角速度,X,Y,Z
7、服务命令行
chen@ubuntu:~$ rosservice list
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
服务端:海龟仿真器
客户端:就是终端
6.1、/spawn 产生两只小海龟,同样按tab键补全,仿真器左下角为0点
设置坐标和名字
chen@ubuntu:~$ rosservice call /spawn "x: 3.0
y: 3.0
theta: 0.0
name: 'turtle2'"
name: "turtle2"
6.2、话题里面就会有turtle2的话题,可以控制它运动
chen@ubuntu:~$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
/turtle2/cmd_vel
/turtle2/color_sensor
/turtle2/pose
控制海龟2运动
chen@ubuntu:~$ rostopic pub -r 10 /turtle2/cmd_vel geometry_msgs/Twist "linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"

7、rosbag话题记录及复现
使用方法:rosbag record -a(所有参数都保存) -O(保存成1个压缩包) cmd_record(压缩包名字)
chen@ubuntu:~$ rosbag record -a -O cmd_record
[ INFO] [1582616136.187106436]: Subscribing to /turtle1/color_sensor
[ INFO] [1582616136.192318325]: Subscribing to /turtle2/color_sensor
[ INFO] [1582616136.193249810]: Recording to cmd_record.bag.
[ INFO] [1582616136.195759848]: Subscribing to /rosout
[ INFO] [1582616136.202357404]: Subscribing to /turtle2/pose
[ INFO] [1582616136.204658934]: Subscribing to /rosout_agg
[ INFO] [1582616136.207321729]: Subscribing to /turtle1/cmd_vel
[ INFO] [1582616136.210592803]: Subscribing to /turtle1/pose
^Cchen@ubuntu:~$
按ctrl+c,退出并保存当前记录数据,数据在home主文件夹下

7.2 复现
先关掉仿真器控制节点
重新启动roscore,和仿真器节点rosrun turtlesim turtlesim_node ,不启动键盘控制节点。
命令
rosbag play cmd_record.bag
复现如下
















 231
231











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









