







写在前面的话:
最近的大半年一直在和矩阵分解和数值运算打交道,基本功不扎实吃了很多亏。
主要是在做算法的研究和优化。核心算法里需要用到矩阵分解的思想,目前广泛应用的分解方式有整数分解,特征值分解(eigen value),奇异值分解(SVD),非负矩阵分解(non-negative matrix fatorization)等等。我整个学习和使用的过程比较艰辛,走了很多弯路,因为之前完全把分解算法当做黑盒来处理,并没有深入进去算法的本质。而本文作为一个记录,回顾一下我学习过程的一些思考,以及一部分自己的见解。
本文主要分为五部分,在目录中有介绍,正文部分写的比较凌乱,因为记录了自己思考的整个过程,思维混乱是做研究的大忌,所以以后要改正,特别是需要静下心来慢慢梳理的部分。好在SVD的学习曲线不算非常陡峭,因而可以充分的边学边思考。目前许多大型的算法在建立之后(比如大部分的推荐算法以及计算广告等)都会划归为矩阵的操作,这里面有普通的数值运算,也有复杂的分解和变换。而奇异值分解(SVD)就是这其中效果很好并广为使用的一种,SVD的一个代数特性就是它用到了几乎所有的线性代数知识,把线性代数从入门到进阶的基础知识完美的串联了起来,推导逐层深入,理解逐渐细化。所以当你对SVD了然于心的时候,不知不觉之间,线性代数的基础知识也更加稳固了。
--------------------------------------------------------------------------------------------------------------------
content
背景
1. 什么是SVD
- concept
- geometry/physical aspect
2. SVD实现
- conventional algorithm
3. 算法优化
- modify: compute the largest singular value
4. MATLAB的实现
5. SVD的应用
- Rank
- PCA
- image denoise
- video deblocking
- recommender system
--------------------------------------------------------------------------------------------------------------------
背景
最近几个月一直在做一些有关奇异值分解(SVD,Singular Value Decomposition)的东西,并没有从理论上创新的修改奇异值的计算方法,只是在学习和了解的过程中逐渐明白了SVD的一些意义和实际的应用场景。学习的过程中间走了很多弯路,也有了很多不理解的地方,到现在也不敢说是完全明白,但是我觉得有必要总结一下这一系列的东西,顺便也梳理一下研究的思路,不要因为走得太远而忘记了为了什么而出发。同时在知乎上也有一个这类的问题[1],但是个人觉得高票的几个回答从不同的角度在解释这个问题,所以尝试自己写一个比较简单的问题。
1. 什么是SVD
1.1 概念
SVD是Singular Value Decomposition的缩写,翻译成中文一般是奇异值分解。这是一种矩阵分解形式,它将一个矩阵(可以是实矩阵也可以是复矩阵,我们只讨论实矩阵)分解为三个子矩阵,分别代表了左奇异向量,奇异值矩阵以及右奇异向量。直接说概念可能会比较抽象,后面会详细的介绍各个矩阵的左右以及物理意义。除了奇异值分解,目前常用的矩阵分解方式还有根据特征值分解以及非负矩阵分解(Non-negative Matrix Factorization, NMF)。如果需要回忆一些线性代数的基础知识的话,可以参考[2]网易公开课上MIT的线性代数课程,
Gilbert Strang将很多线性代数的基础知识讲的深入浅出,个人强推。
那么,奇异值的数学表达式是什么呢?对于矩阵X,总能找到一个正交矩阵U和一个正交矩阵V,以及一个对角矩阵
Σ,使得:
X = UΣV
T
式子成立。其中,U被称为的左奇异向量,V被称为右奇异向量,而对角矩阵
Σ的主对角线上的值称为矩阵X的奇异值,并按照从大到小降序排列。
1.2 几何意义
以2x2的矩阵为例,因为二阶矩阵可以使用平面在直角坐标系来表示,主要参考了[3]。SVD在2x2矩阵上的作用的几何意义主要是可以将二维空间下两个互相正交(也就是垂直)的向量,通过矩阵分解,变换为另一个二维空间下互相正交的两个向量。具体的过程如下图所示。
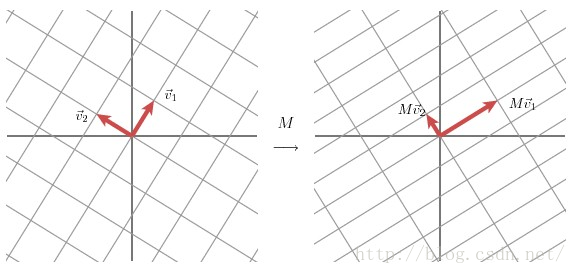
上图的含义是,我们在左图首先选定了两个单位正交基向量
V
1和
V
2
。那么此时,通过矩阵M的作用下,左图中的一个二维空间(左图正方形格子)下的正交向量
V
1和
V
2
。就变换成为了另一个二维空间(右图长方形格子)下的正交向量Mv
1和
Mv
2
。然后我们在
Mv
1和
Mv
2
的方向上分别选择两个单位向量
u1
和
u2
,同时设
Mv
1和
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2781
2781

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









