







跑完KF-GINS在dataset会得到以下几个文件
其中每部分文件的格式github与说明文档给出来了准确的含义。
第一部分:IMU GNSS数据

第二部分:TRUTH文件与计算的NAV文件(文本格式)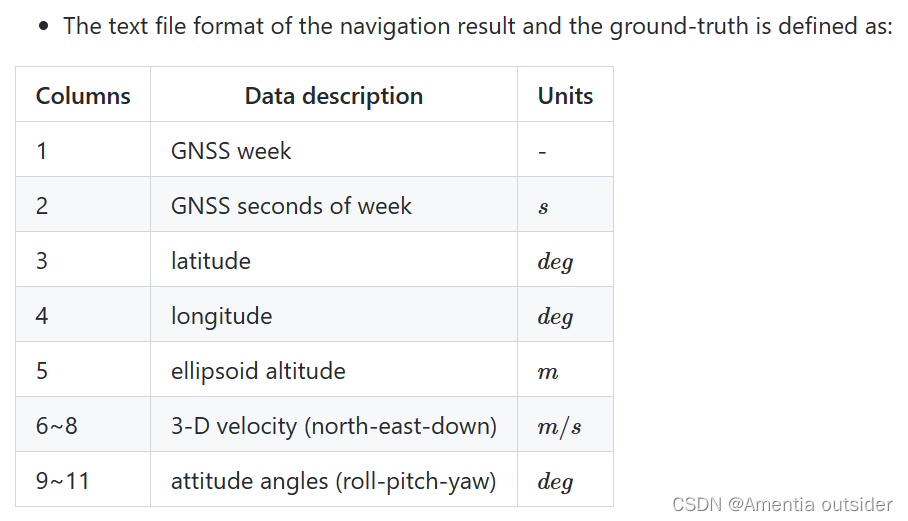
第三部分:IMU error 、STD(bin二进制格式)
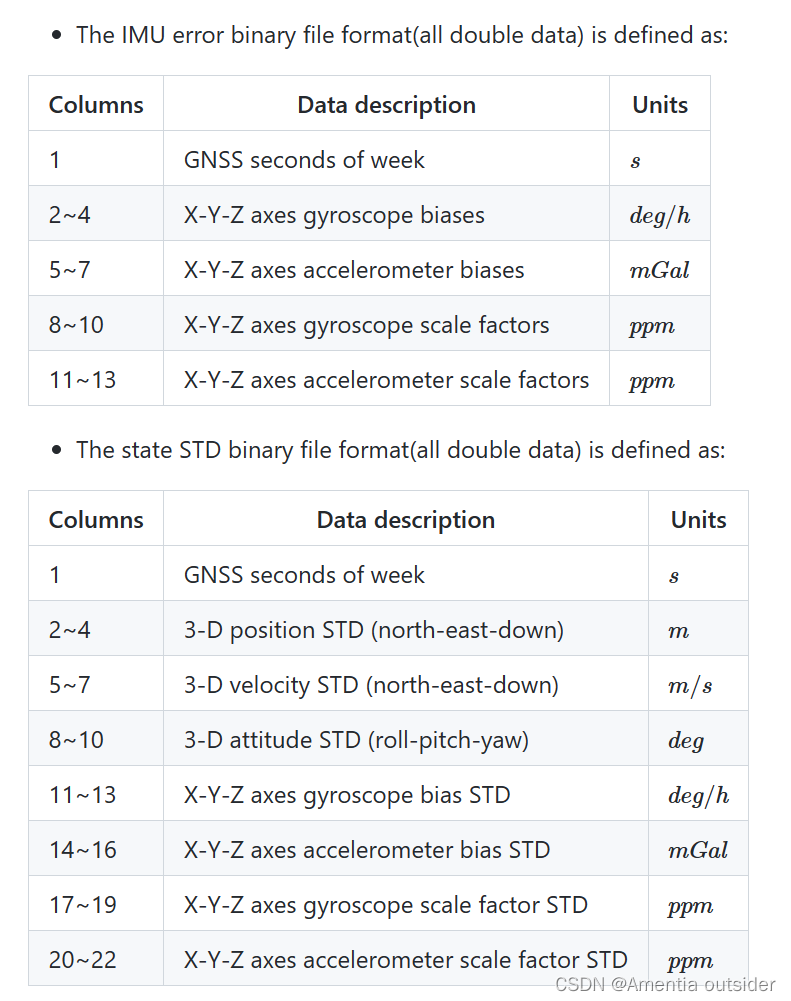
本文章介绍如何用python读取第三部分bin二进制文件,并简单绘图。
1、需要numpy pandas matplotlib random
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import random2、读取IMU_ERR.bin文件、设置列名
# xyz一起版, 折线
# 颜色列表
color_choice = ['#e791c8' , '#d695e5', '#a8aceb', '#54acd2', '#4faaaf'
, '#4aab98', '#4ab067', '#8ca547', '#b39d4a', '#dd9250'
, '#ea96a3',]
time = df['time (s)']-456300.0094123、设置画布、颜色、绘图
# 设置画布
fig = plt.figure(figsize=(12,8))
#随机在color_choice中选择三个颜色
color_a, color_b, color_c = random.sample(color_choice, 3)
# 选择 --> 'X axes gyroscope biases (deg/h)' 列
col_name1 = data_columns[1]
# 线段图
plt.plot(time, df[col_name1],label=col_name1[:1], color=color_a)
# 散点图
# plt.scatter(time, df[col_name1],label=col_name1[:1], color=color_a)
col_name2 = data_columns[2]
plt.plot(time, df[col_name2],label=col_name2[:1], color=color_b)
col_name3 = data_columns[2]
plt.plot(time, df[col_name3],label=col_name3[:1], color=color_c)
# 显示图例
plt.legend(frameon=False, fontsize='16')
plt.ylabel(col_name1[6:],fontsize='20')
plt.xlabel(data_columns[0],fontsize='20')
# 显示网格
plt.grid()
plt.xticks(fontsize='16')
plt.yticks(fontsize='16')
# 设置保存图片的的名称
file_name_save = 'xxx .jpg'
# 保存图片
plt.savefig(file_name_save, dpi=600, format='jpg', bbox_inches = 'tight')其中散点图出来的结果比较丑.....不够平滑,我就去掉了。
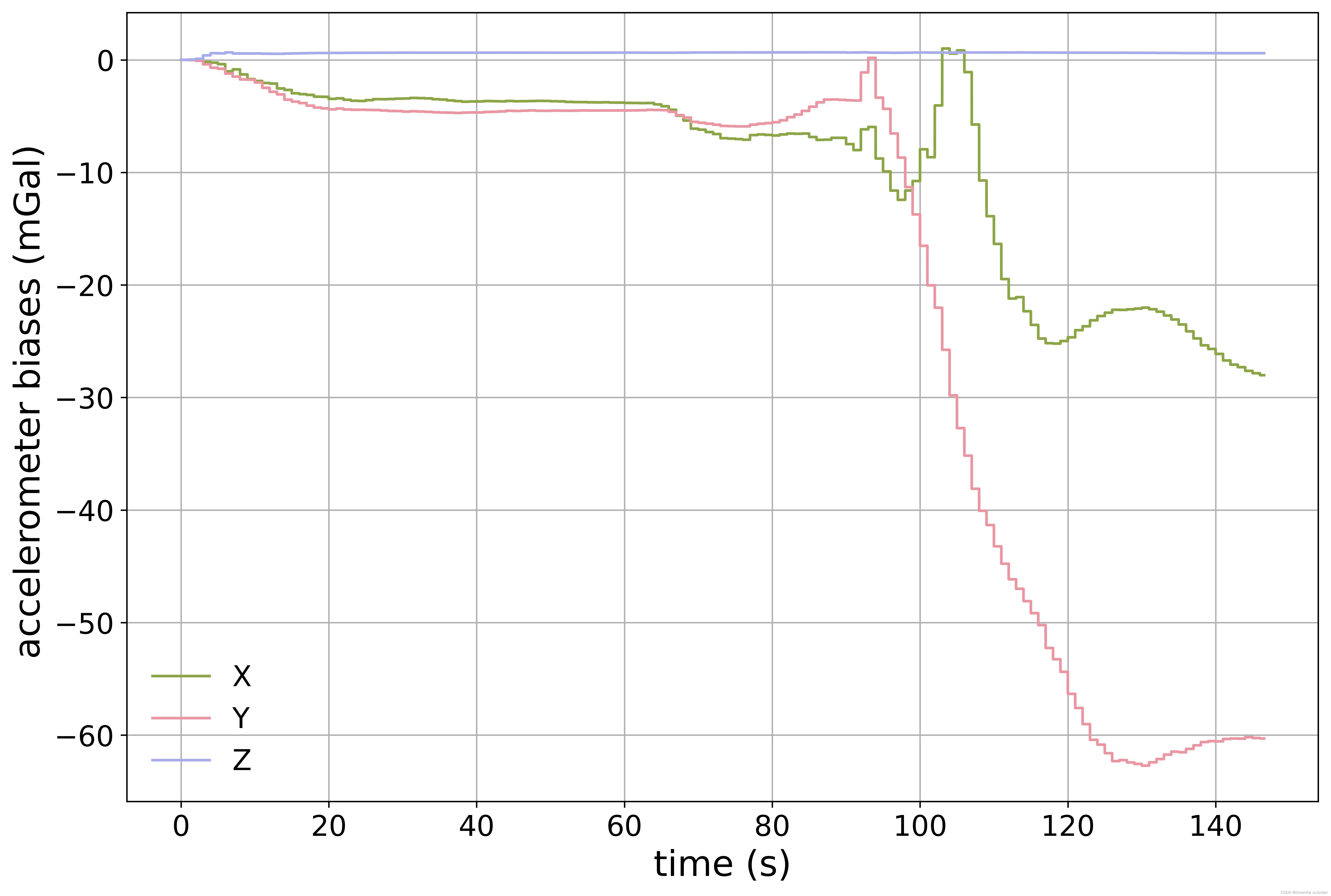
4、循环版
#############################################################################
# 循环版
color_choice = ['#e791c8' , '#d695e5', '#a8aceb', '#54acd2', '#4faaaf'
, '#4aab98', '#4ab067', '#8ca547', '#b39d4a', '#dd9250'
, '#ea96a3',]
time = df['time (s)']-456300.009412
for i in range(4):
fig = plt.figure(figsize=(12,8))
number = i*3
color_a, color_b, color_c = random.sample(color_choice, 3)
col_name1 = data_columns[number+1]
plt.plot(time, df[col_name1],label=col_name1[:1], color=color_a)
col_name2 = data_columns[number+2]
plt.plot(time, df[col_name2],label=col_name2[:1], color=color_b)
col_name3 = data_columns[number+3]
plt.plot(time, df[col_name3],label=col_name3[:1], color=color_c)
plt.legend(frameon=False, fontsize='16')
plt.ylabel(col_name1[6:],fontsize='20')
plt.xlabel(data_columns[0],fontsize='20')
plt.grid()
plt.xticks(fontsize='16')
plt.yticks(fontsize='16')
file_name_save = col_name1[7:-7] + '.jpg'
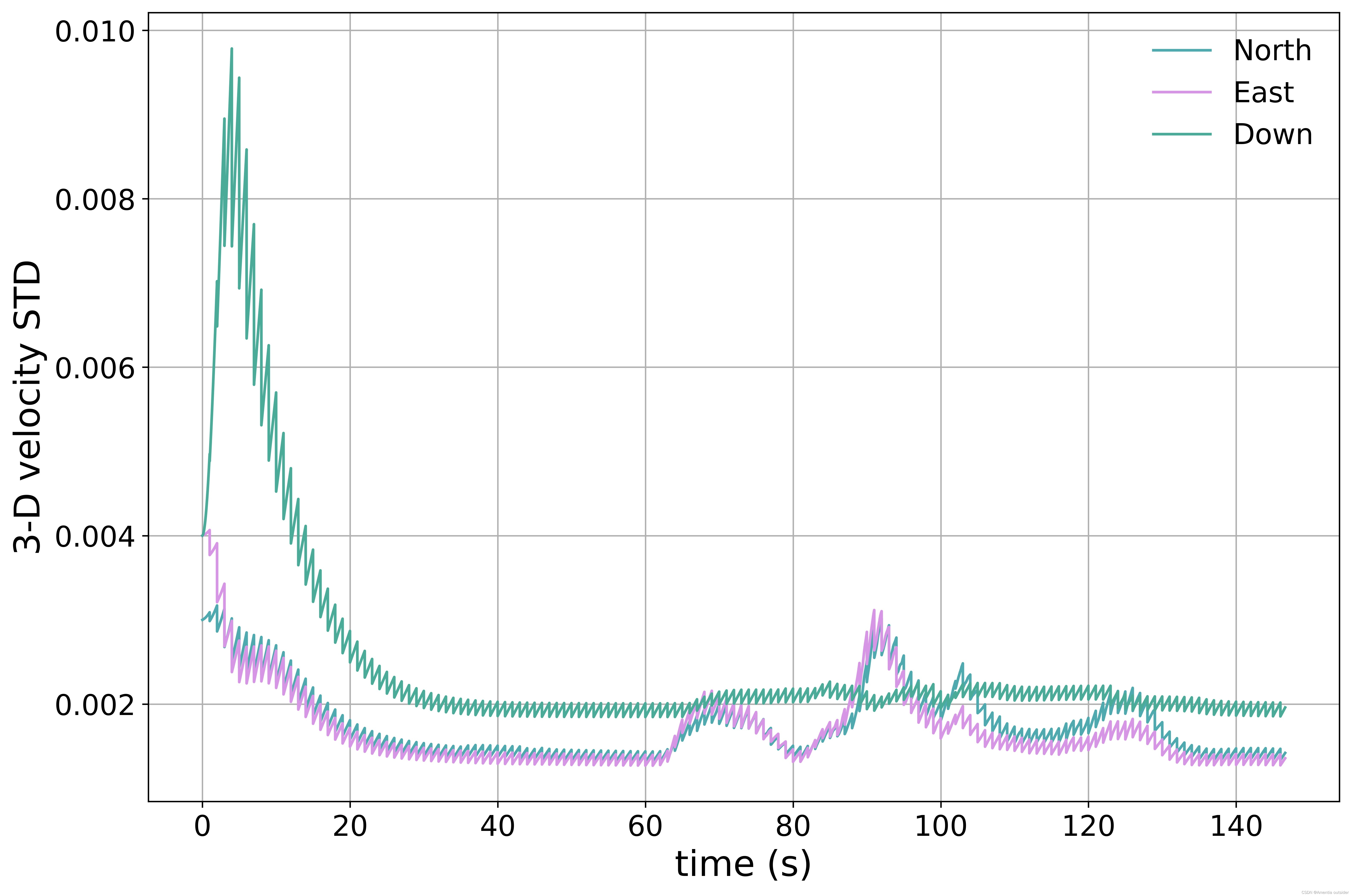
plt.savefig(file_name_save, dpi=600, format='jpg', bbox_inches = 'tight')5、绘制STD图片
################# STD code #################
# 读取数据
data = np.fromfile("STD.bin", dtype='double', )
data_columns=['time (s)', 'North 3-D position STD', 'East 3-D position STD', 'Down 3-D position STD'
, 'North 3-D velocity STD', 'East 3-D velocity STD', 'Down 3-D velocity STD'
,'Roll 3-D attitude STD', 'Pitch 3-D attitude STD', 'yaw 3-D attitude STD'
, 'X axes gyroscope biases STD (deg/h)', 'Y axes gyroscope biases STD (deg/h)', 'Z axes gyroscope biases STD (deg/h)'
, 'X axes accelerometer biases STD (mGal)', 'Y axes accelerometer biases STD (mGal)', 'Z axes accelerometer biases STD (mGal)'
, 'X axes gyroscope scale factor STD (ppm)' , 'Y axes gyroscope scale factor STD (ppm)' , 'Z axes gyroscope scale factor STD (ppm)'
, 'X axes accelerometer scale factor STD (ppm)', 'Y axes accelerometer scale factor STD (ppm)', 'Z axes accelerometer scale factor STD (ppm)']
df = pd.DataFrame(data.reshape(29328,22),columns=data_columns)
# 颜色
color_choice = ['#e791c8' , '#d695e5', '#a8aceb', '#54acd2', '#4faaaf'
, '#4aab98', '#4ab067', '#8ca547', '#b39d4a', '#dd9250'
, '#ea96a3',]
time = df['time (s)']-456300.009412
for i in range(7):
fig = plt.figure(figsize=(12,8))
number = i*3
color_a, color_b, color_c = random.sample(color_choice, 3)
col_name1 = data_columns[number+1]
label_a = col_name1.split(' ')[0]
label_y = ' '.join(col_name1.split(' ')[1:])
if 'axes ' in label_y:
label_y = label_y.strip('axes ')
plt.plot(time, df[col_name1],label=label_a, color=color_a)
col_name2 = data_columns[number+2]
label_b = col_name2.split(' ')[0]
plt.plot(time, df[col_name2],label=label_b, color=color_b)
col_name3 = data_columns[number+3]
label_c = col_name3.split(' ')[0]
plt.plot(time, df[col_name3],label=label_c, color=color_c)
plt.legend(frameon=False, fontsize='16')
plt.ylabel(label_y,fontsize='20')
plt.xlabel(data_columns[0],fontsize='20')
plt.grid()
plt.xticks(fontsize='16')
plt.yticks(fontsize='16')
if i >= 3:
file_name_save = label_y[:-7] + '.jpg'
else:
file_name_save = label_y + '.jpg'
plt.savefig(file_name_save, dpi=600, format='jpg', bbox_inches = 'tight')

结果如下:










完整代码如下:
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import random
# 读取文件
data = np.fromfile("IMU_ERR.bin", dtype='double', )
# 设置列名
data_columns = ['time (s)', 'X axes gyroscope biases (deg/h)', 'Y axes gyroscope biases (deg/h)',
'Z axes gyroscope biases (deg/h)'
, 'X axes accelerometer biases (mGal)', 'Y axes accelerometer biases (mGal)', 'Z axes accelerometer biases (mGal)'
, 'X axes gyroscope scale factors (ppm)', 'Y axes gyroscope scale factors (ppm)',
'Z axes gyroscope scale factors (ppm)'
, 'X axes accelerometer scale factors (ppm)', 'Y axes accelerometer scale factors (ppm)',
'Z axes accelerometer scale factors (ppm)']
# 381017个数据,13列,29309行数据
print(type(data.shape[0]))
row_n = int(data.shape[0]/13)
df = pd.DataFrame(data.reshape(row_n,13),columns=data_columns)
# xyz一起版, 折线
# 颜色列表
color_choice = ['#e791c8', '#d695e5', '#a8aceb', '#54acd2', '#4faaaf'
, '#4aab98', '#4ab067', '#8ca547', '#b39d4a', '#dd9250'
, '#ea96a3', ]
time = df['time (s)'] - df.iloc[0, 0]
# 设置画布
fig = plt.figure(figsize=(12, 8))
# 随机在color_choice中选择三个颜色
color_a, color_b, color_c = random.sample(color_choice, 3)
# 选择 --> 'X axes gyroscope biases (deg/h)' 列
col_name1 = data_columns[1]
# 线段图
plt.plot(time, df[col_name1], label=col_name1[:1], color=color_a)
# 散点图
# plt.scatter(time, df[col_name1],label=col_name1[:1], color=color_a)
col_name2 = data_columns[2]
plt.plot(time, df[col_name2], label=col_name2[:1], color=color_b)
col_name3 = data_columns[2]
plt.plot(time, df[col_name3], label=col_name3[:1], color=color_c)
# 显示图例
plt.legend(frameon=False, fontsize='16')
plt.ylabel(col_name1[6:], fontsize='20')
plt.xlabel(data_columns[0], fontsize='20')
# 显示网格
plt.grid()
plt.xticks(fontsize='16')
plt.yticks(fontsize='16')
# 设置保存图片的的名称
file_name_save = 'xxx .jpg'
# 保存图片
plt.savefig(file_name_save, dpi=600, format='jpg', bbox_inches='tight')
#############################################################################
# 循环版
color_choice = ['#e791c8', '#d695e5', '#a8aceb', '#54acd2', '#4faaaf'
, '#4aab98', '#4ab067', '#8ca547', '#b39d4a', '#dd9250'
, '#ea96a3', ]
time = df['time (s)'] - df.iloc[0, 0]
for i in range(4):
fig = plt.figure(figsize=(12, 8))
number = i * 3
color_a, color_b, color_c = random.sample(color_choice, 3)
col_name1 = data_columns[number + 1]
plt.plot(time, df[col_name1], label=col_name1[:1], color=color_a)
col_name2 = data_columns[number + 2]
plt.plot(time, df[col_name2], label=col_name2[:1], color=color_b)
col_name3 = data_columns[number + 3]
plt.plot(time, df[col_name3], label=col_name3[:1], color=color_c)
plt.legend(frameon=False, fontsize='16')
plt.ylabel(col_name1[6:], fontsize='20')
plt.xlabel(data_columns[0], fontsize='20')
plt.grid()
plt.xticks(fontsize='16')
plt.yticks(fontsize='16')
file_name_save = col_name1[7:-7] + '.jpg'
plt.savefig(file_name_save, dpi=600, format='jpg', bbox_inches='tight')
################# STD code #################
# 读取数据
data = np.fromfile("STD.bin", dtype='double', )
data_columns = ['time (s)', 'North 3-D position STD (m)', 'East 3-D position STD (m)', 'Down 3-D position STD (m)'
, 'North 3-D velocity STD ', 'East 3-D velocity STD ', 'Down 3-D velocity STD '
, 'Roll 3-D attitude STD (deg)', 'Pitch 3-D attitude STD (deg)', 'yaw 3-D attitude STD (deg)'
, 'X axes gyroscope biases STD (deg/h)', 'Y axes gyroscope biases STD (deg/h)',
'Z axes gyroscope biases STD (deg/h)'
, 'X axes accelerometer biases STD (mGal)', 'Y axes accelerometer biases STD (mGal)',
'Z axes accelerometer biases STD (mGal)'
, 'X axes gyroscope scale factor STD (ppm)', 'Y axes gyroscope scale factor STD (ppm)',
'Z axes gyroscope scale factor STD (ppm)'
, 'X axes accelerometer scale factor STD (ppm)', 'Y axes accelerometer scale factor STD (ppm)',
'Z axes accelerometer scale factor STD (ppm)']
row_n = int(data.shape[0]/22)
df = pd.DataFrame(data.reshape(row_n,22),columns=data_columns)
# 颜色
color_choice = ['#e791c8', '#d695e5', '#a8aceb', '#54acd2', '#4faaaf'
, '#4aab98', '#4ab067', '#8ca547', '#b39d4a', '#dd9250'
, '#ea96a3', ]
time = df['time (s)'] - df.iloc[0, 0]
for i in range(7):
fig = plt.figure(figsize=(12, 8))
number = i * 3
color_a, color_b, color_c = random.sample(color_choice, 3)
col_name1 = data_columns[number + 1]
label_a = col_name1.split(' ')[0]
label_y = ' '.join(col_name1.split(' ')[1:])
if 'axes ' in label_y:
label_y = label_y.strip('axes ')
plt.plot(time, df[col_name1], label=label_a, color=color_a)
col_name2 = data_columns[number + 2]
label_b = col_name2.split(' ')[0]
plt.plot(time, df[col_name2], label=label_b, color=color_b)
col_name3 = data_columns[number + 3]
label_c = col_name3.split(' ')[0]
plt.plot(time, df[col_name3], label=label_c, color=color_c)
plt.legend(frameon=False, fontsize='16')
plt.ylabel(label_y, fontsize='20')
plt.xlabel(data_columns[0], fontsize='20')
plt.grid()
plt.xticks(fontsize='16')
plt.yticks(fontsize='16')
if i >= 3:
file_name_save = label_y[:-7] + '.jpg'
else:
file_name_save = label_y + '.jpg'
plt.savefig(file_name_save, dpi=600, format='jpg', bbox_inches='tight')













 719
719











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









