







1.卫星定位原理
基于数学上求解多元方程组可知通过三维空间的无源测距 ,可以求解GNSS导航定位解 。如果仅仅使用单颗卫星的测距信息,则用户的位置解为以卫星为球心半径为r的球面,这就是一个位置面(surface of position , SOP) 。若使用两颗卫星的测距信息,则用户位置解的轨迹为半径分别为和
两个球的相交圆。如果再增加第三个卫星测距信息,则用户的位置解限制在下图所示圆上的两个点上。对于大多数应用情况,实际上仅仅存在一个位置解,而另一个位置解可能在太空,也可能在地球内部或者是用户操作区域之外。如果两个解都可行的话,则可以使用第四个距离测量值来解决定位解的模糊性。

在GNSS 系统中,接收机和卫星的时钟并不是同步的。因此产生的测量值为伪距,而不是距离。从卫星s 到用户天线α 的伪距为:
式中:由为对应的真实距离;
为接收机的钟差,
为卫星的钟差。卫星的钟差由控制段来测量,并通过导航电文发射,因此导航处理器能够校正卫星钟差。而接收机的钟差是未知的,但是对于一给定的接收机,对所有同时接收的伪距测量值,接收机钟差是一样的。因此,它可以作为导航解的一部分和用户位置一起求解。除非采用限制条件, GNSS的导航解是四维的,包含三个位置和一个接收机钟差。
四维导航解的求解,至少要求四个不同的GNSS卫星的测量值,这就是通常所说的四星定位的来历。从下图中信号的几何分布说明这个问题。如果半径等于伪距的球面放置在四颗卫星中任意一颗卫星周围,正常的情况下,四个球面不存在任何交叉点。但是,每一个伪距减去由于接收机钟差造成的距离误差,那么仅仅剩下距离。而半径等于距离的四个球面将相交于用户的位置点。因此,通过调整四个球的半径,且调整的大小相等,直到它们相交,就能够得到
。在实际中,位置和钟差是同时求解的。而且,如果存在两个解,仅仅其中一个解是切实可行的位置解。
经过卫星钟差(以及其他已知误差)修正后的每个伪距测量值,可以表示为在信号发射时刻
卫星的位置
在信号到达时刻
的用户天线位置
和接收机钟差所导致的测距误差
的函数:

其中忽略测量噪声。如下图所示。根据导航电文中广播的一系列描述卫星轨道的参数,称为星历( ephemeris),以及修正后的卫星信号发射时间测量值,就可以求解卫星的位置。如果信号的到达时间一样,那么由天线位置和接收机钟差构成的四个未知量对每一颗卫星的伪距方程来说都是相同的。因此通过求解四个由伪距测量值所构成的瞬间方程可以得到四个未知量的解。用同样的方法,采用一系列的伪距率测量值即伪距的变化率,可以求解用户天线的速度和接收机的钟差漂移。

除了导航和定位功能, GNSS 也可用于授时服务,用来同步一个网络中的所有时钟。
2.GNSS(GPS)体系结构
对于不同GNSS系统,其体系结构基本相同。以GPS为例,由空间星座部分、地面监控部分与用户设备组成,见下图所示。

空间星座部分有多颗卫星运行在高度约为20000km的近似圆形轨道上,这些卫星分布在6个轨道上,每个轨道上不规则地分布着4颗卫星,每个轨道面与地球赤道面的夹角约为55°,运行周期约为12h。
地面监控部分主要由主控站MCS、监测站和地面天线组成。地面监控的目的是实现系统的宏观调控及维护,具体包括4个方面:
a)监测及维持星座中每颗卫星的轨道,必要时可重新部署及定位;
b) 保证卫星的可用性;
c)维持GPS时间;
d)完成每颗卫星时钟参数和卫星星历的预测计算,周期性重载信息哎更新导航数据
用户设备部分是接受GPS卫星无线电信号的接受机,并完成对用户的位置、速度和时间的估算。
3.误差源和性能的限制
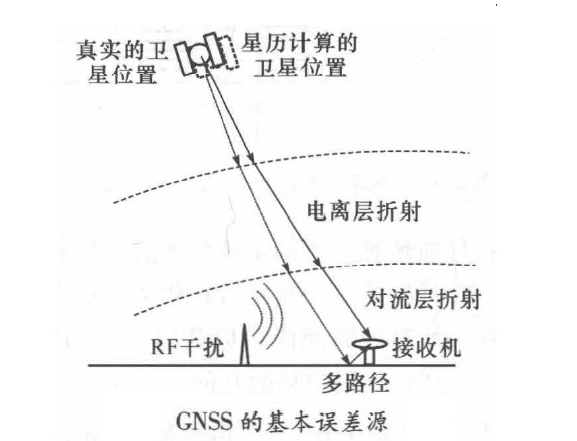
GNSS 导航解计算的误差源包含广播星历与真实星历间的误差和卫星钟差。信号传播延迟误差来源于信号在电离层和对流层中的折射,从而造成很大的测距误差。使用模型可以部分补偿电离层和对流层的延迟误差。然而,如果一颗卫星使用多个频点的测距信息,那么可以使用差分技术确定电离层传播延迟误差。接收机的测量误差是由于接收机动态响应延迟、接收机噪声、射频(radio frequency , RF) 干扰及信号的多路径干扰而引起的。当GNSS 信号被建筑物和地面反射时,接收到的信号多于一路,则就出现了多路径现象。接收机在定位过程中涉及的误差包括卫星时钟钟差、接收机时钟钟差、电离层延时、对流层延时、多径误差、卫星轨道误差、接收机噪声、用户等距误差,详见下图所示。
一颗卫星的仰角就是用户到卫星的视线矢量与水平面的夹角。低仰角的卫星信号存在较大的电离层和对流层传播延迟,同时也易遭受多路径干扰。因此,大多数GNSS 接收机摒弃低于某一仰角的卫星信号,该仰角称为屏蔽角。屏蔽角的值通常设为5°~15° 。
在好的接收条件下, GNSS 的定位精度典型的为几米,定位性能与所采用的信号有关。如果使用一个或者多个已知精确位置的参考基站提供修正信息,那么导航定位的精度能够改善到米级。这就是差分GNSS(differential GNSS , DGNSS) 技术。在好的环境下,采用载波相位差分技术可以获得厘米级的定位精度。参考基站也可用于GNSS 信号的故障监测,这种处理称为完好性监测。
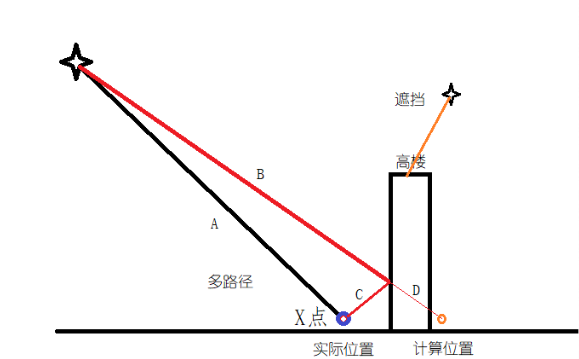
在一些恶劣的环境中, GNSS 的性能会下降。GNSS 信号可能被建筑物、地形和用户设备的载体一部分所遮挡。接收机可能仅仅接收反射路径的信号,称为非视线( nonline - of - sight , NLOS) 接收,非视线接收引入了大的正的距离误差。如下图所示。低仰角的卫星信号受到影响更大。在高楼环绕的街道称为城市l峡谷( urban canyons) 中, GNSS 信号的遮挡和多路径干扰常常发生。建筑物高度与接收机到建筑物之间的距离之比决定了有多少颗卫星信号能够绕过建筑物而被接收机所接收。在城市区域,接收到的GNSS 星座数对定位的性能有较大的影响。在山区,GNSS 信号的遮挡同样经常发生,主要是由于在山谷时低仰角的卫星被遮挡。

因此,接收到可进行导航解算所需的4 颗卫星信号并不是经常可行的,尤其是仅仅使用一种星座时。有时候,通过预测接收机钟差,或者假设用户高度不变,当卫星数目小于4 颗时,在一段有限时间内可以获得用户的导航解。即使当收到4颗或者4 颗以上的卫星信号时,如果信号的几何分布很差时,也可能在某一方向导致较差的定位精度。多路径和NLOS 抵消技术可用于抵消多路径效应,而现在逐渐得到应用的影像匹配(shadow matching) 技术或视觉定位,即一种使用三维城市模型,将视觉信息与高精地图进行匹配的新型定位技术,用来提高城市峡谷环境中的GNSS 定位性能。
当信号衰减时,GNSS 性能也会下降,如在室内或者树下的环境。邻近频段的通信信号的RF 干扰、任意频段强信号的滤波留下的谐波和GNSS 信号本身的故意干扰都会造成GNSS 性能的下降。与其他类型的无线电信号比较, GNSS 信号相当脆弱,因此它们很容易衰减和容易受到干扰。
4.高精定位方法
针对定位过程中包括卫星时钟钟差、接收机时钟钟差、电离层延时、对流层延时、多径误差、卫星轨道误差、接收机噪声、用户等距误差等,要提升定位精度,需要想办法消除这些误差,下面给出几种常见的室外高精定位方法,室内定位还有红外、射频、蓝牙、WiFi、ZigBee等。
4.1 双频GNSS
不同频率的电磁波通过电离层时会有不同的延迟,人们发现,对两个或多个频率的观测值进行线性组合,可以消除电离层误差,从而能提升精度。这就是双频GNSS定位的原理。小米8是业界第一款支持双频GNSS定位的手机,后续各大厂商均进行了跟进,一些高端手机均采用双频定位。消除电离层误差后,定位精度可以提升到5米以内。
4.2 地基/星基增强
星历误差、卫星时钟误差、甚至是电离层和对流层误差都是可以观测或建模的,一旦计算出了实时的误差值,就可以通过一个单独的通道进行播发,接收设备在定位过程中使用这些修正项,就可以提升定位精度。播发的通道一般有两种,一种是直接通过卫星播发,称为SBAS(Satellite-Based Augmentation System),好处是覆盖广,但设备需要增加额外的信号接收通道;另一种是地基增强,比如通过互联网,这需要设备具备联网能力。
这些增强方式对于精度提升是有限的,还是有很多误差项无法消除,比如电离层误差。
4.3 差分定位(RTK)
RTK是Real - time kinematic的缩写,是一种差分定位方法。在目前常见的改善INS/GNSS组合导航的高精定位方法中比较多见。其原理是利用一个参考站提供基准观测值,然后用设备的观测值与基准站的观测值进行差分,差分后可以消掉星历误差、卫星钟差、电离层误差,再进行星间差分后可以进一步消除掉设备的钟差,最终可以算出设备相对基准站的相对坐标,如果基准站位置已知,就可以完成准确的绝对坐标,精度可以达到厘米级甚至毫米级。
RTK能提升精度的另一个原因是引入了载波相位观测,相比伪距观测值,载波相位观测值的误差更小。使用RTK,需要在附近20km内有参考站(距离太远,电离层误差不一样,做差分无法完全消除误差),同时需要持续不断的获得参考站的观测数据(一般通过互联网传输,使用RTCM协议),因此相对普通的定位,RTK定位成本较高,但对于一些对精度要求很高的场景,比如车道级定位、自动驾驶等,是必不可少的。
RTK服务一般由专业服务商提供,如千寻、六分,这些服务商在全国范围内部署了数千个基准站,持续对订阅用户播发数据。
4.4 精密单点定位(PPP)
RTK需要布设密集的参考站,那有没有办法不依赖参考站?PPP(precise point positioning)就是一种方法,它的原理是对每一种误差进行准确建模,最终求解出卫星和设备之间的准确距离。为了确定准确的误差,PPP定位时需要不断的迭代内部参数,而且,一些卫星的误差只有当卫星位置变化后才能体现出来,所以PPP需要比较长的收敛时间,一般需要30分钟才能收敛到理想的精度,如何更快的收敛是目前学术界的一个研究热点。
4.5 红外线室内定位
红外线室内定位有两种,第一种是被定位目标使用红外线IR标识作为移动点,发射调制的红外射线,通过安装在室内的光学传感器接收进行定位;第二种是通过多对发射器和接收器织红外线网覆盖待测空间,直接对运动目标进行定位。
红外线的技术已经非常成熟,用于室内定位精度相对较高,但是由于红外线只能视距传播,穿透性极差(可以参考家里的电视遥控器),当标识被遮挡时就无法正常工作,也极易受灯光、烟雾等环境因素影响明显。加上红外线的传输距离不长,使其在布局上,无论哪种方式,都需要在每个遮挡背后、甚至转角都安装接收端,布局复杂,使得成本提升,而定位效果有限。红外线室内定位技术比较适用于实验室对简单物体的轨迹精确定位记录以及室内自走机器人的位置定位。
4.6 射频室内定位
射频识别室内定位技术利用射频方式,固定天线把无线电信号调成电磁场,附着于物品的标签进过磁场后感应电流生成把数据传送出去,以多对双向通信交换数据以达到识别和三角定位的目的。(感应门禁卡和商场防盗系统用的就是这种技术)
射频识别室内定位技术作用距离很近,但它可以在几毫秒内得到厘米级定位精度的信息,且由于电磁场非视距等优点,传输范围很大,而且标识的体积比较小,造价比较低。但其不具有通信能力,抗干扰能力较差,不便于整合到其他系统之中,且用户的安全隐私保障和国际标准化都不够完善。 射频识别室内定位已经被仓库、工厂、商场广泛使用在货物、商品流转定位上。
4.7 蓝牙室内定位
蓝牙室内定位技术最大的优点是设备体积小、短距离、低功耗,容易集成在手机等移动设备中。只要设备的蓝牙功能开启,就能够对其进行定位。蓝牙传输不受视距的影响,但对于复杂的空间环境,蓝牙系统的稳定性稍差,受噪声信号干扰大且在于蓝牙器件和设备的价格比较昂贵。 蓝牙室内定位主要应用于对人的小范围定位,例如单层大厅或商店。
4.8 WIFI室内定位
Wi-Fi定位技术有两种,一种是通过移动设备和三个无线网络接入点的无线信号强度,通过差分算法,来比较精准地对人和车辆的进行三角定位。另一种是事先记录巨量的确定位置点的信号强度,通过用新加入的设备的信号强度对比拥有巨量数据的数据库,来确定位置。
Wi-Fi定位可以在广泛的应用领域内实现复杂的大范围定位、监测和追踪任务,总精度比较高,但是用于室内定位的精度只能达到2米左右,无法做到精准定位。由于Wi-Fi路由器和移动终端的普及,使得定位系统可以与其他客户共享网络,硬件成本很低,而且Wi-Fi的定位系统可以降低了射频干扰可能性。
Wi-Fi定位适用于对人或者车的定位导航,可以于医疗机构、主题公园、工厂、商场等各种需要定位导航的场合。
4.9 ZigBee室内定位
ZigBee室内定位技术通过若干个待定位的盲节点和一个已知位置的参考节点与网关之间形成组网,每个微小的盲节点之间相互协调通信以实现全部定位。
ZigBee是一种新兴的短距离、低速率无线网络技术,这些传感器只需要很少的能量,以接力的方式通过无线电波将数据从一个节点传到另一个节点,作为一个低功耗和低成本的通信系统,ZigBee的工作效率非常高。但ZigBee的信号传输受多径效应和移动的影响都很大,而且定位精度取决于信道物理品质、信号源密度、环境和算法的准确性,造成定位软件的成本较高,提高空间还很大。ZigBee室内定位已经被很多大型的工厂和车间作为人员在岗管理系统所采用。
4.10 UWB超宽带室内定位技术
超宽带定位技术是一种全新的、与传统通信定位技术有极大差异的新技术。它利用事先布置好的已知位置的锚节点和桥节点,与新加入的盲节点进行通讯,并利用三角定位或者“指纹”定位方式来确定位置。
超宽带通信不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒或纳秒级以下的极窄脉冲来传输数据,因此具有GHz量级的带宽。由于超宽带定位技术具有穿透力强、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点,前景相当广阔。但由于新加入的盲节点也需要主动通信使得功耗较高,而且事先也需要布局,使得成本还无法降低。超宽带室内定位可用于各个领域的室内精确定位和导航,包括人和大型物品,例如汽车地库停车导航、矿井人员定位、贵重物品仓储等。
5.参考文献
GNSS 与惯性及多传感器组合导航系统原理 (第二版)
Fundamentals of Inertial Navigation,Satellite-based Positioning and their Integration



















 6423
6423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











