






目标:学习 ROS 2 中四元数使用的基础知识。
教程级别:中级
时间:10 分钟
目录
背景
先决条件
四元数的组成部分
ROS 2 中的四元数类型
四元数运算
1. 首先在 RPY 中思考,然后转换为四元数
2 应用四元数旋转
3 反转四元数
4 相对旋转
摘要
背景
四元数是一种表示方向的四元组,比旋转矩阵更简洁。四元数在分析涉及三维旋转的情况时非常高效。四元数广泛应用于机器人学、量子力学、计算机视觉和 3D 动画。
您可以在维基百科上 https://en.wikipedia.org/wiki/Quaternion 了解更多关于基础数学概念的信息。您还可以观看由 3blue1brown https://www.youtube.com/3blue1brown 制作的可视化四元数 https://eater.net/quaternions 视频系列。
在本教程中,您将学习四元数和转换方法在 ROS 2 中的工作原理。
先决条件
然而,这不是一个硬性要求,您可以坚持使用任何其他最适合您的几何变换库。您可以查看诸如 transforms3d、scipy.spatial.transform、pytransform3d、numpy-quaternion 或 blender.mathutils 之类的库。
https://github.com/matthew-brett/transforms3d
https://github.com/scipy/scipy/tree/main/scipy/spatial/transform
https://github.com/dfki-ric/pytransform3d
https://github.com/moble/quaternion
https://docs.blender.org/api/master/mathutils.html
四元数的组成部分
ROS 2 使用四元数来跟踪和应用旋转。一个四元数有 4 个分量 (x, y, z, w) 。在 ROS 2 中, w 是最后一个,但在一些像 Eigen 这样的库中, w 可以放在第一个位置。常用的单位四元数不会绕 x/y/z 轴旋转是 (0, 0, 0, 1) ,可以通过以下方式创建:
#include <tf2/LinearMath/Quaternion.h>
...
tf2::Quaternion q;
// Create a quaternion from roll/pitch/yaw in radians (0, 0, 0)
q.setRPY(0, 0, 0);
// Print the quaternion components (0, 0, 0, 1)
RCLCPP_INFO(this->get_logger(), "%f %f %f %f",
q.x(), q.y(), q.z(), q.w());四元数的大小应始终为一。如果数值误差导致四元数大小不为一,ROS 2 将打印警告。为了避免这些警告,请规范化四元数:
q.normalize();ROS 2 中的四元数类型
ROS 2 使用两种四元数数据类型: tf2::Quaternion 及其等效的 geometry_msgs::msg::Quaternion 。要在 C++ 中进行转换,请使用 tf2_geometry_msgs 的方法。
C++
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
...
tf2::Quaternion tf2_quat, tf2_quat_from_msg;
tf2_quat.setRPY(roll, pitch, yaw);
// 将 tf2::Quaternion 转换为 geometry_msgs::msg::Quaternion
geometry_msgs::msg::Quaternion msg_quat = tf2::toMsg(tf2_quat);
// 将 geometry_msgs::msg::Quaternion 转换为 tf2::Quaternion
tf2::convert(msg_quat, tf2_quat_from_msg);
// 或者
tf2::fromMsg(msg_quat, tf2_quat_from_msg);Python
from geometry_msgs.msg import Quaternion
...
# 创建一个浮点数列表,该列表与 tf2 四元数方法兼容
quat_tf = [0.0, 1.0, 0.0, 0.0]
# 将列表转换为 geometry_msgs.msg.Quaternion
msg_quat = Quaternion(x=quat_tf[0], y=quat_tf[1], z=quat_tf[2], w=quat_tf[3])四元数运算
1 在 RPY 中思考,然后转换为四元数
我们很容易想到围绕轴的旋转,但很难用四元数来思考。建议是计算目标旋转时使用滚转(绕 X 轴)、俯仰(绕 Y 轴)和偏航(绕 Z 轴),然后转换为四元数。
# quaternion_from_euler method is available in turtle_tf2_py/turtle_tf2_py/turtle_tf2_broadcaster.py
q = quaternion_from_euler(1.5707, 0, -1.5707)
print(f'The quaternion representation is x: {q[0]} y: {q[1]} z: {q[2]} w: {q[3]}.')2 应用四元数旋转
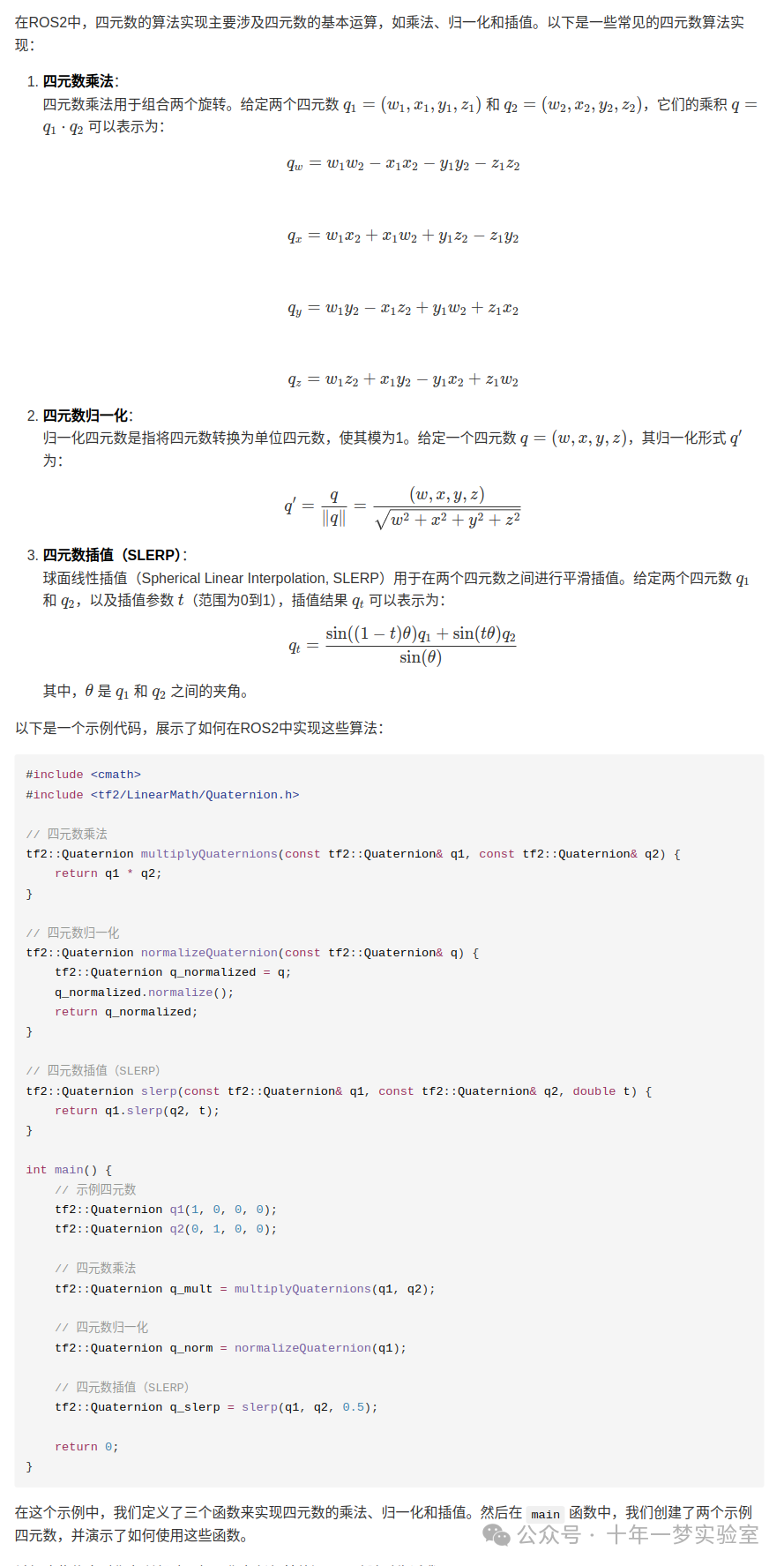
要将一个四元数的旋转应用到一个姿态上,只需将姿态的前一个四元数与表示所需旋转的四元数相乘。这种乘法的顺序很重要。
C++
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
...
tf2::Quaternion q_orig, q_rot, q_new;
q_orig.setRPY(0.0, 0.0, 0.0); // 设置初始姿态的四元数
// 将前一个姿态绕X轴旋转180度
q_rot.setRPY(3.14159, 0.0, 0.0);
q_new = q_rot * q_orig; // 应用旋转
q_new.normalize(); // 归一化新四元数Python
q_orig = quaternion_from_euler(0, 0, 0)
# Rotate the previous pose by 180* about X
q_rot = quaternion_from_euler(3.14159, 0, 0)
q_new = quaternion_multiply(q_rot, q_orig)3 四元数求逆
一种简单的单位四元数求逆方法是取反 w 分量: 单位四元数的逆就是其共轭四元数.
q[3] = -q[3]4 相对旋转
假设你有两个来自同一框架的四元数, q_1 和 q_2 。你想找到相对旋转, q_r ,以如下方式将 q_1 转换为 q_2 :
q_2 = q_r * q_1你可以像解矩阵方程一样解 q_r 。将 q_1 取逆并右乘两边。同样,乘法的顺序很重要:
q_r = q_2 * q_1_inverse以下是一个示例,说明如何在 Python 中获取从先前机器人姿态到当前机器人姿态的相对旋转:
import numpy as np
def quaternion_multiply(q0, q1):
"""
乘两个四元数。
输入
:param q0: 一个包含第一个四元数的4元素数组 (q0w, q0x, q0y, q0z)
:param q1: 一个包含第二个四元数的4元素数组 (q1w, q1x, q1y, q1z)
输出
:return: 一个包含最终四元数的4元素数组 (qw, qx, qy, qz)
"""
# 从 q0 中提取值
w0 = q0[0]
x0 = q0[1]
y0 = q0[2]
z0 = q0[3]
# 从 q1 中提取值
w1 = q1[0]
x1 = q1[1]
y1 = q1[2]
z1 = q1[3]
# 逐项计算两个四元数的乘积
q0q1_w = w0 * w1 - x0 * x1 - y0 * y1 - z0 * z1
q0q1_x = w0 * x1 + x0 * w1 + y0 * z1 - z0 * y1
q0q1_y = w0 * y1 - x0 * z1 + y0 * w1 + z0 * x1
q0q1_z = w0 * z1 + x0 * y1 - y0 * x1 + z0 * w1
# 创建一个包含最终四元数的4元素数组
final_quaternion = np.array([q0q1_w, q0q1_x, q0q1_y, q0q1_z])
# 返回一个包含最终四元数的4元素数组 (qw, qx, qy, qz)
return final_quaternion
# 获取前一个姿态的四元数的逆(共轭)或者单w部取反
q1_inv = [0, 0, 0, 0]
q1_inv[0] = prev_pose.pose.orientation.w
q1_inv[1] = -prev_pose.pose.orientation.x
q1_inv[2] = -prev_pose.pose.orientation.y
q1_inv[3] = -prev_pose.pose.orientation.z # 取负以求逆
# 获取当前姿态的四元数
q2 = [0, 0, 0, 0]
q2[0] = current_pose.pose.orientation.w
q2[1] = current_pose.pose.orientation.x
q2[2] = current_pose.pose.orientation.y
q2[3] = current_pose.pose.orientation.z
# 计算最终的四元数
qr = quaternion_multiply(q2, q1_inv)摘要
在本教程中,您了解了四元数的基本概念及其相关的数学运算,如求逆和旋转。您还了解了它在 ROS 2 中的使用示例以及两个不同四元数类之间的转换方法。















 5549
5549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









