







需要特别说明:ROS版本必须与Ubuntu系统版本匹配
实验环境:
ROS Fuerte
Ubuntu 12.04
在进行实际使用ROS开发之前,首先对ROS中的一些基础操作内容进行学习。使用TurtleSim进行练习,其中包括如何建立功能包、使用节点、使用参数服务和移动一个虚拟的机器人。
(1)查看ROS文件系统
使用rospack和rosstack来获取有关功能包、功能包集、路径和依赖性等信息。
查找turtlesim包的路径
$ rospack find turtlesim获得功能包或功能包集下面的文件列表
$ rosls turtlesim进入到某个文件夹,使用roscd命令
$ roscd turtlesim(2) 创建工作空间
查看ROS正在使用的工作空间
$ echo $ROS_PACKAGE_PATH我们将要创建的文件夹是在~/dev/rosbook/中,使用如下命令
$ cd ~
$ mkdir -p dev/rosbook创建好文件夹后我们需要将新路径添加到ROS_PACKAGE_PATH,需要在~/.bashrc文件的末尾添加新的一行:
$ echo "export ROS_PACKAGE_PATH=~/dev/rosbook:${ROS_PACKAGE_PATH}" >> ~/.bashrc
$ . ~/.bashrc这样我们就在ROS系统中创建和配置完成自己的新文件夹。
(3)创建ROS功能包
可以使用手动创建功能包,为了避免繁琐工作,推荐使用roscreate-pck命令行工具。
在rosbook文件夹下创建新的功能包
$ roscreate-pkg davebobo_tutorials std_msgs rospy roscpp此功能包的格式包括功能包名称和依赖项;其中依赖项包括std_msgs rospy roscpp,如下命令行所示
$ roscreate-pkg [package_name] [depend1] [depend2] [depend3]值得说明的是:
- std_msgs 包含了常见消息类型,表示基本数据类型和其他基本的消息构造,如多维数组
- rospy 一个ROS的纯Python客户端库。
- roscpp 使用C++实现的ROS的各种功能。程序员能够用这些接口快速完成与ROS的主题、服务和参数相关的开发工作。
正确执行以上命令后的效果:
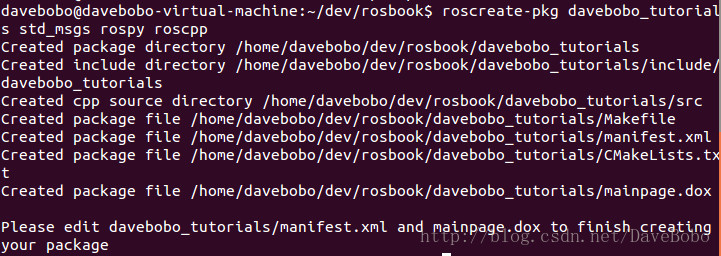
我们可以使用rospack、roscd、rosls命令来获取新的功能包信息。
(4)编译ROS功能包
如果创建了一个功能包并且编写了一下代码,就需要编译功能包了。编译功能包时主要是代码的编译过程,为了编译功能包,可以使用命令rosmak
roscd davebobo_tutorials
rosmake davebobo _tutorial
几秒之后编译成功。
(5)使用ROS节点
节点都是可执行程序,位于packagename/bin目录中,我们使用turtlesim的功能包进行练习。
在开始之前,必须使用如下命令启动roscore
$ roscore使用rosrun命令启动一个新的节点。
$ rosrun turtlesim turtlesim_node我们可以看见出现一个新窗口,窗口中间出现一个小海龟。
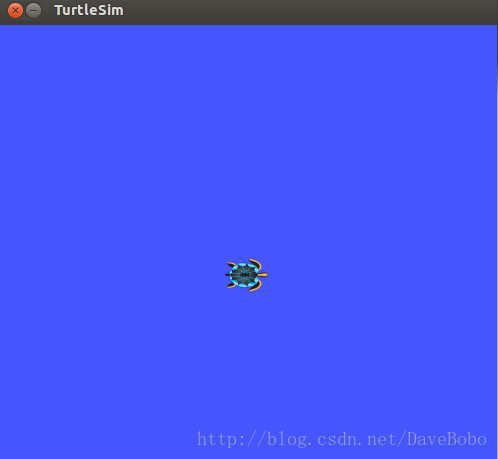
这时再去查看节点列表就会看到出现一个新的节点。叫做/turtlesim。使用rosnode info Nodename查看节点的信息。
$ rosnode info /turtlesim
--------------------------------------------------------------------------------
Node [/turtlesim]
Publications:
* /turtle1/color_sensor [turtlesim/Color]
* /rosout [rosgraph_msgs/Log]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/command_velocity [unknown type]
Services:
* /turtle1/teleport_absolute
* /turtlesim/get_loggers
* /turtlesim/set_logger_level
* /reset
* /spawn
* /clear
* /turtle1/set_pen
* /turtle1/teleport_relative
* /kill
contacting node http://davebobo-virtual-machine:60313/ ...
Pid: 3770
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS以上信息中,包括发布者(及相应主题)、订阅者(及相应主题)和该节点具有的服务(srv)及它们各自唯一的名称。
(6)使用主题与节点交互
首先需要打开一个终端在里面运行roscore:
$ roscore再打开一个终端,在里面运行一个turtlesim_node节点:
$ rosrun turtlesim turtlesim_node打开另一个终端,在里面输入:
$ rosrun turtlesim turtle_teleop_key在运行完这条命令后,在这个终端下,按键盘上的方向键可以看到,之前我们运行的乌龟开始移动,:-),很有意思吧。
urtlesim_node和turtle_teleop_key通过ROS的主题来相互通信。turtle_teleop_key把用户按下的键发布到主题上,turtlesim_node也订阅了同一个主题用来接收用户按下的键,并做出相应的动作。我们有这个例子可以体会到主题的作用,更加深刻的认识到了节点的概念。
可以使用以下命令查看/teleop_turtle和/turtlesim节点的信息。
$ rosnode info /teleop_turtle
$ rosnode info /turtlesim使用rostopic pub [topic] [msg_type] [args]命令直接发布主题。
$ rostopic pub -1 /turtle1/command_velocity turtlesim/Velocity -- 1 1可以看到小海龟在做曲线运动。
(7)使用服务
同上,先运行roscore并启动turtlesim节点。使用以下命令列出在turtlesim节点运行时系统提供的服务。
$ rosservice list使用/spawn服务在不同的方向和不同的位置创建另一只小海龟。
$ rosservice call /spawn 3 3 0.2 "new_turtle"(8)使用参数服务器
参数服务器用于存储所有节点均可以访问的共享数据。ROS中用于管理参数服务器的工具称为rosparam,查看被所有节点所使用的服务器参数:
$ rosparam list可以使用get参数读取某个值,也可以使用set参数设定一个新的值。rosparam的另外一个特性是参数转存。通过该参数可以保存或加载参数服务器的内容。
使用rosparam dump [file_name]来保存参数服务器。
$ rosparam dump save.yaml使用rosparam load [file_name] [namesapce]像参数服务器加载一个新的数据文件。
$ rosparam load save.yaml namespace(9)创建节点和编译节点
本节使用一个实例进行学习,一个发布一些数据,另一个接收这些数据,两个节点之间使用最基本的工作进行通信。进入如下文件位置:
$ roscd davebobo_tutorials/src/创建两个文件并分别命名为exaple1_a.cpp和example_b.cpp, exaple1_a.cpp文件将会发送带有节点名称的数据, exaple1_b.cpp文件会把这些数据显示在shell窗口中。
exaple1_a.cpp中的代码如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc,char **argv)
{
ros::init(argc,argv,"example1_a");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message",1000);
ros::Rate loop_rate(10);
while(ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "I am the example1_a node";
msg.data = ss.str();
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}exaple1_b.cpp中的代码如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
void chatterCallback(const std_msgs::String::ConstPtr&msg)
{
ROS_INFO("I heard: [%s]",msg->data.c_str());
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"example1_b");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("message",100,chatterCallback);
ros::spin();
return 0;
}编写好程序后,当使用davebobo_tutorials功能包时,需要自行编辑CMakeLists.txt文件。使用自己喜欢的编辑器或直接使用rosed工具将会在VIM编辑器下打开这个文件,并将以下命令行复制到文件的末尾处:
rosbuild_add_executable(example1_a src/example1_a.cpp)
rosbuild_add_executable(example1_b src/example1_b.cpp)启动ROS,然后在不同的shell窗口下分别运行以下命令
$ rosrun davebobo_tutorials example1_a
$ rosrun davebobo_tutorials example1_b可以发现在example1_b运行的shell窗口可以打印出INFO消息。
(10)创建并使用msg和srv文件
① 服务
首先,在davebobo_tutorials功能包下创建msg文件夹,并在其中创建一个新的文件davebobo_msg1.msg。在文件中增加以下行:
int32 A
int32 B
int32 C接着编辑CMakeList.txt从rosbuild_genmsg()这一行中删除#,然后使用rosmake命令编译功能包。
$ rosmake dvaebobo_tutorials为检查编译是否正确,使用rosmsg命令,如果可以看到与davebobo_msg1.msg文件中相同的内容说明编译正确。
$ rosmsg show davebobo_tutorials/davebobo_msg1现在创建一个srv文件,同样在dvaebobo_tutorials文件夹下创建一个名为srv的文件,并新建davebobo_srv1.srv.在文件中增加以下行
int32 A
int32 B
int32 C
---
int32 sum编辑 CMakeList.txt从rosbuild_gensrv()这一行中删除#,重新编译功能包并使用rossrv工具来检查。
$ rossrv show davebobo_tutorials/davebobo_srv1.srv上面我们在ROS中创建一个服务,接着我们需要两个节点,一个服务器和一个客户端。在davebobo_tutorials功能包中新建两个节点分别命名为example2_a.cpp和 example2_b.cpp.
example2_a.cpp中的代码:
#include "ros/ros.h"
#include "davebobo_tutorials/davebobo_srv1.h"
bool add(davebobo_tutorials::davebobo_srv1::Request &req,
davebobo_tutorials::davebobo_srv1::Response &res)
{
res.sum = req.A + req.B + req.C;
ROS_INFO("request: A=%ld, B=%ld C=%ld", (int)req.A, (int)req.B, (int)req.C);
ROS_INFO("sending back response: [%ld]", (int)res.sum);
return true;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_3_ints_server");
ros::NodeHandle n;
ros::ServiceServer service = n.advertiseService("add_3_ints", add);
ROS_INFO("Ready to add 3 ints.");
ros::spin();
return 0;
}example2_b.cpp中的代码:
#include "ros/ros.h"
#include "davebobo_tutorials/davebobo_srv1.h"
#include <cstdlib>
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_3_ints_client");
if (argc != 4)
{
ROS_INFO("usage: add_3_ints_client A B C ");
return 1;
}
ros::NodeHandle n;
ros::ServiceClient client = n.serviceClient<davebobo_tutorials::davebobo_srv1>("add_3_ints");
davebobo_tutorials::davebobo_srv1 srv;
srv.request.A = atoll(argv[1]);
srv.request.B = atoll(argv[2]);
srv.request.C = atoll(argv[3]);
if (client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}为了编译节点,在CMakeList.txt文件中增加以下行:
rosbuild_add_executable(example2_a src/example2_a.cpp)
rosbuild_add_executable(example2_b src/example2_b.cpp)执行编译命令:
$ rosmake davebobo_tutorials分别在不同命令窗口启动节点:
$ rosrun davebobo_tutorials example2_a
$ rosrun davebobo_tutorials example2_b 1 2 3example2_a窗口如下显示

example2_b窗口如下显示

② 消息
现在将使用自定义的msg文件来创建节点。创建example3_a.cpp和 example3_b.cpp文件,同时调用davebobo_msg1.msg
example3_a.cpp中代码
#include "ros/ros.h"
#include "davebobo_tutorials/davebobo_msg1.h"
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "example1_a");
ros::NodeHandle n;
ros::Publisher pub = n.advertise<davebobo_tutorials::davebobo_msg1>("message", 1000);
ros::Rate loop_rate(10);
while (ros::ok())
{
davebobo_tutorials::davebobo_msg1 msg;
msg.A = 1;
msg.B = 2;
msg.C = 3;
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
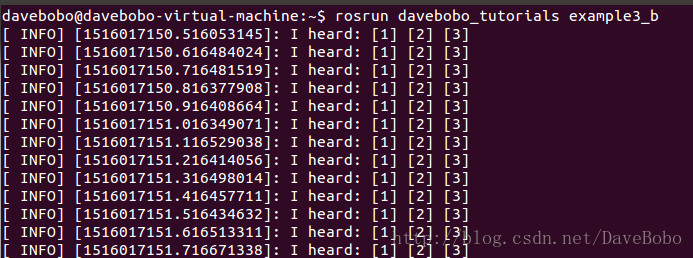
}example3_b.cpp中代码
#include "ros/ros.h"
#include "davebobo_tutorials/davebobo_msg1.h"
void messageCallback(const davebobo_tutorials::davebobo_msg1::ConstPtr& msg)
{
ROS_INFO("I heard: [%d] [%d] [%d]", msg->A, msg->B, msg->C);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "example1_b");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("message", 1000, messageCallback);
ros::spin();
return 0;
}现在运行这两个节点会显示如下:
References:
[1]. Aaron Martinez Enrique Fern andez, ROS机器人程序设计[B], P14-42, 2014.
http://blog.csdn.net/xiaocainiaoshangxiao/article/details/13578493















 1476
1476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











