







 本文介绍了如何使用Arduino 2560板控制舵机转动。通过连接杜邦线,将舵机的灰色线接GND,中间线接5V,信号线接PWM接口。在代码中,利用Servo库的attach()函数,通过串口接收指令控制舵机在0到180度间移动,并实现了正向、反向旋转、停在中间位置及退出等功能。
本文介绍了如何使用Arduino 2560板控制舵机转动。通过连接杜邦线,将舵机的灰色线接GND,中间线接5V,信号线接PWM接口。在代码中,利用Servo库的attach()函数,通过串口接收指令控制舵机在0到180度间移动,并实现了正向、反向旋转、停在中间位置及退出等功能。
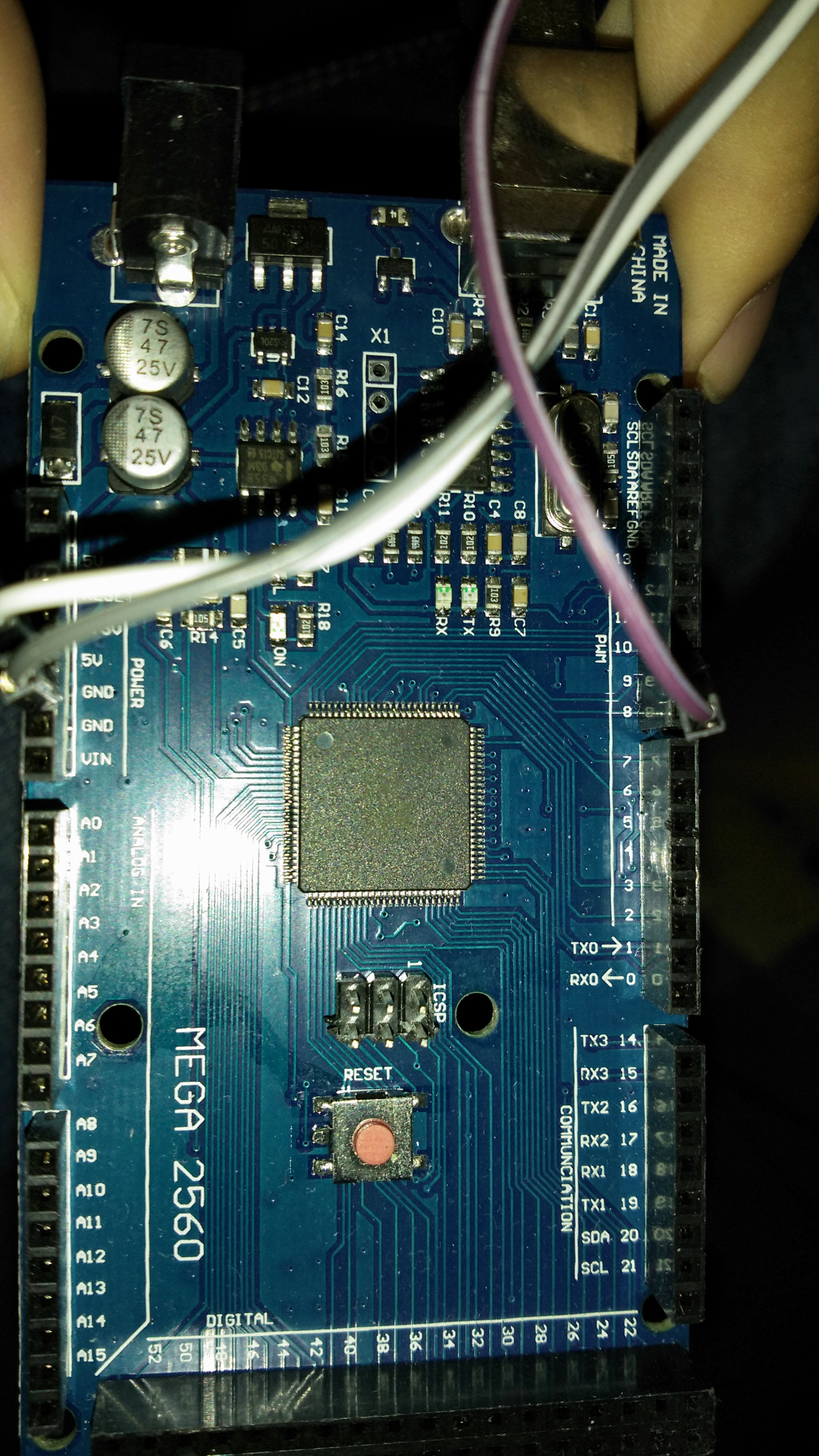
买来的舵机通过杜邦线将舵机的与Arduino板相连,此处所用的Arduino为2560的,所以通过Arduino的集成开发环境时应选择该版本,以及选择好对应的端口,这样才能上传成功,
这里舵机有三条线,其中那条灰色的线接到板子上标有GND的接口,中间的线接到5V接口,另外那条线应该接到标有PWD那排里,随便指定一个接口作为信号输出口,利用attach()函数,
该函数包含在头函数Servo.h当中,这里利用串口发消息来控制舵机运动,串口频率按照一般的设置成9600bps。
具体实现代码如下:
#include<Servo.h>
Servo ser;
int pos;
int i=0;
void setup() {
ser.attach(9);
Serial.begin(9600);
}
Servo ser;
int pos;
int i=0;
void setup() {
ser.attach(9);
Serial.begin(9600);
}
void loop() {
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









