







论文《Real-Time Loop Closure in 2D LIDAR SLAM》
分枝定界是一种深度优先的树形搜索方法,避免了暴力搜索带来的计算量庞大等问题,成为cartographer的重要组成部分。
其很好地被用于激光slam的回环检测中。用当前的scan和全局地图global map进行匹配,以找到此帧scan的位姿。
所以目的要明确——寻找当前帧的位姿。
1.栅格地图
首先需要明确,什么是栅格地图,或者叫占据栅格地图。
https://zhuanlan.zhihu.com/p/21738718
建议读者仔细阅读上述链接。当然,可以先接着往下看。我这里总结一下上述链接的内容。
我们将地图划分成细小的栅格,每一个栅格可以用栅格中心点(grid point)表示。每一个栅格都有两个状态:
(1)free 未被占据
(2)occupied 被占据
2.回环检测
回环检测的目的是,通过当前扫描帧scan的数据,与global map全局的地图进行匹配。
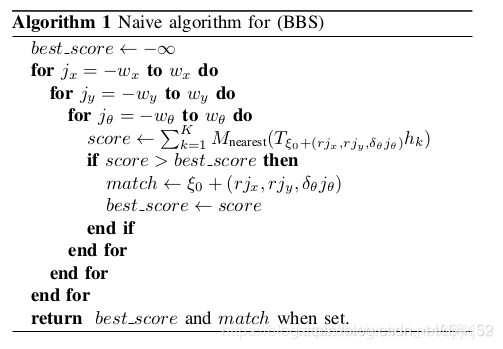
3.暴力搜索
每一个交点代表一个(x, y),对于每个交点,又有一组θ需要遍历。因此就是三层for循环:
for x
----for y
------for θ
当然,我们知道计算三角函数是更耗时的。因此为了一定程度减小计算量,可以
for θ
----for x
------for y
4.评分机制
对于每一个遍历出来的(x, y, θ),我们给它打个分。分最高的我们认为是回环上的位姿。
那么如何进行评分呢?
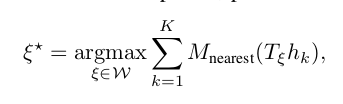
其中W为搜索范围,K表示当前的scan有K个激光点,T表示位姿。
公式中的M nearest(), 表示的就是每个激光点的小分(0.2或是0.7)是:用与他最近的地图点(grid point)的状态量表示。也就是激光点所在栅格的状态量。
将这种打分规则称为:平凡打分法
则我们认为,(x2, y2, θ2)比(x1, y1, θ1)更有可能是正确的姿态。
这样,一个个(x, y, θ)不断遍历,直至遍历完毕,找到一个得分最高的,就是我们认为的回环解。也就是当前scan的匹配位姿,是我们需要的最优解。
我们可以看到,暴力求解是有庞大的计算量的。因为你要把搜索框(search window)中的位姿以分辨率为步长全部遍历一遍。
4.分枝定界
2016年的论文《Real-Time Loop Closure in 2D LIDAR SLAM》使用了一种能够大大减少计算量,并能够不遗漏最优解的方法——分枝定界。(相对于多分辨率搜索而言的)
其主要思想:把全部可行的解空间不断分割为越来越小的子集(称为分支),并为每个子集内的解的值计算一个下界或上界(称为定界)。在每次分支后,对凡是界限超出已知可行解值那些子集不再做进一步分支。这样,解的许多子集(即搜索树上的许多结点)就可以不予考虑了,从而缩小了搜索范围。
分枝定界是一种深度优先的树搜索算法。通过对树进行剪枝,可以缩小了搜索范围,大大减小计算量。但同时又不会遗漏最优解。
分枝定界思想,就是不断缩小搜索范围的过程。
5. 如何将树结构应用于搜索最优位姿中呢?
它是怎么体现于分枝定界方法呢?
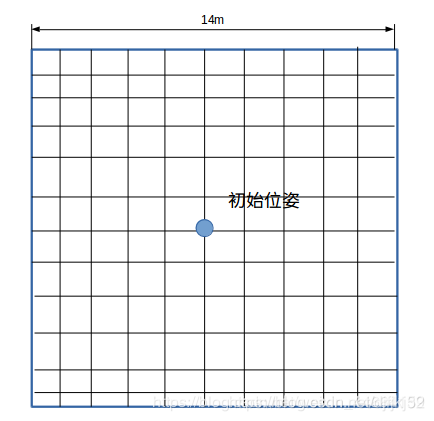
1、整个搜索框:
2、将搜索范围重新划分,这时候步长选的大一点,分出来粗一些
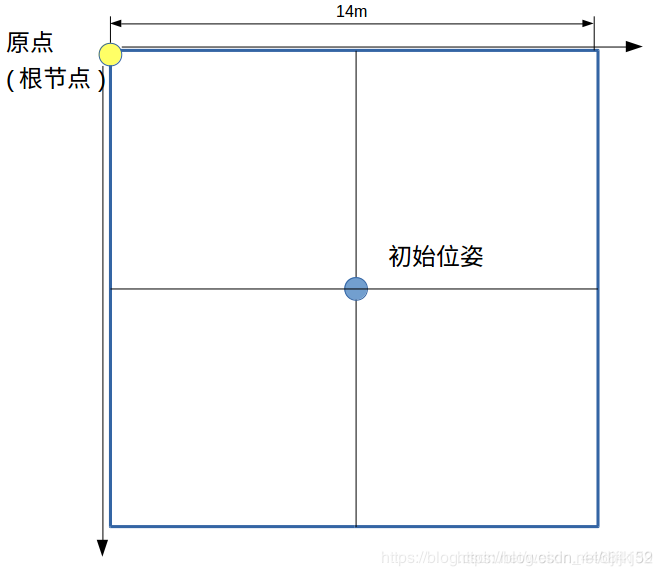
3、一个父节点是向右下角的四个子节点进行分枝的
通过这一次粗分辨率的分割,我们得到了四个子节点
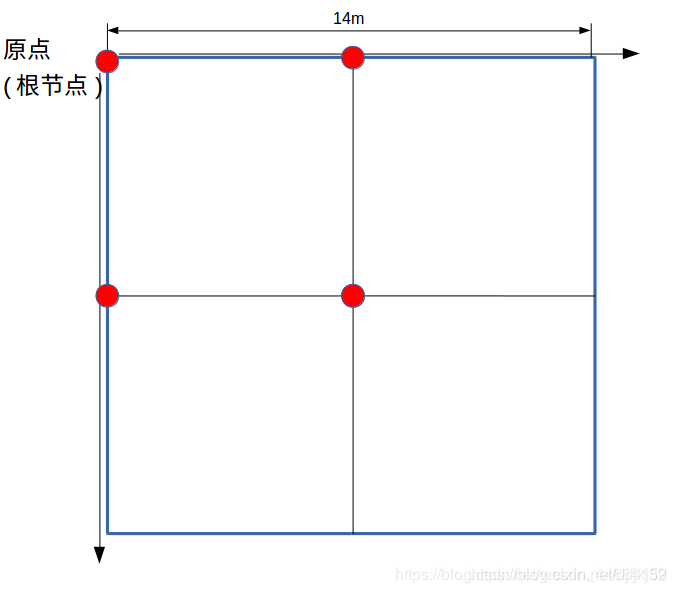
以左上角为原点,分成四份。原点即为树的根节点,也就是位姿(x0, y0)。这里暂不考虑角度,因为每次进行分枝定界之前都要规定一个角度,这个角度下的分枝定界做完以后,再以一定步长更新换角度,重新开始分枝定界。
也就是说,每一次分枝定界的过程中,角度θ是不变的。只是针对了平移
用这四个位姿,将当前帧scan激光点投影到地图坐标系,需要根据评分规则进行打分。
4、打分
4.1、初始化了一个最佳得分best_score = 0.9
4.2、贪心打分
用这四个位姿,将当前帧scan 激光点 投影到地图坐标系,需要根据评分规则进行打分。
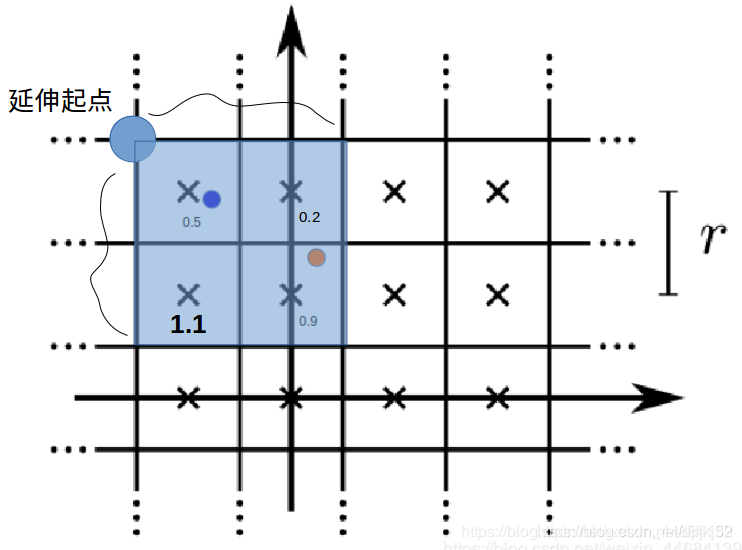
以激光点落入的栅格为起点,向右下角延展 4 d 4^d 4d个栅格(边长为 2 d 2^d 2d)(其中d为打分节点所在层数。从下往上为d = 0,1,2,…) 取延伸区域中最大分数,如下:蓝色激光点打分为1.1
例如 scan和map的打分示意图:(以下是地图,不是姿态搜索框)
5、剪枝
0.2 和 0.5 这两个节点的分数小于best_score,那么直接将此节点统领的区域全部删除,体现在树上,就是进行了剪枝,将这个父节点的子树全部减掉。
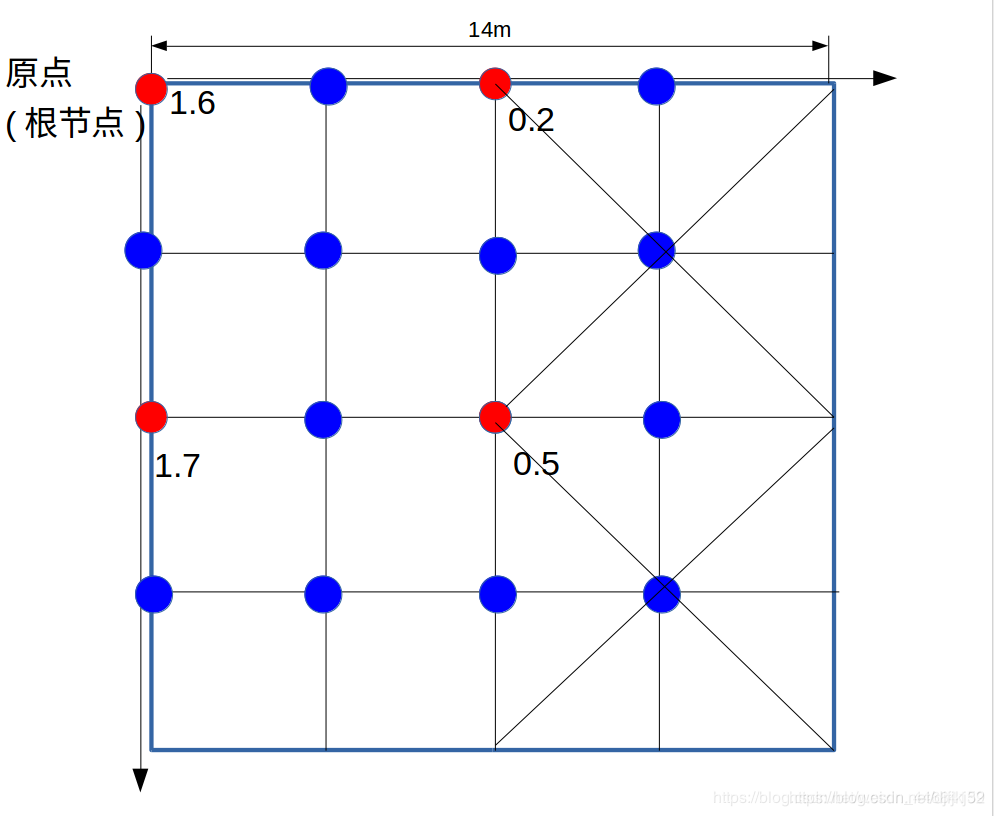
6、依次类推。直到搜寻至叶子节点,找到叶子节点中的best_score,将具有此best_score的叶子节点的位姿,认为是分枝定界最优解。
(参考blog, https://blog.csdn.net/weixin_36976685/article/details/84994701)
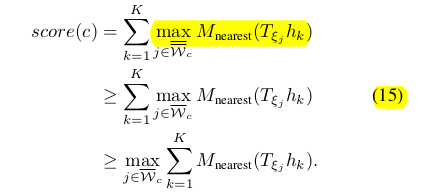
贪心打分法的精髓在于
由于一个父节点的子节点永远是在父节点的基础上向右下方移动,也就是之前所说的,扩展子节点是向右下角四个方向进行扩展。那么父节点位姿变换到栅格坐标系中的点云,经过向右下角平移就可以得到子节点的点云。那么我取所有激光点右下角区域中的最大占据概率得分之和,一定比子节点的所有激光点所在栅格的占据概率得分之和要大。
论文中的公式为:(最大值之和 大于 和的最大值)当然,看不懂这个晦涩式子没有关系,能理解分枝定界足以。
补充
实际上,cartographer会提前计算出不同分辨率下的表,一共七张表。每张表都对应了不同层的层栅格地图中栅格的log-odd得分(通过延伸区域进行得到,如第四节所说)。这样你把点云中的每一个激光点旋转过去落在某个map中的区域的时候,就直接查表得到这个区域的得分作为这个激光点的得分。
七张表存放在一个容器中:在fast_correlative_scan_matcher_2d.h的PrecomputationGridStack2D中:
每一个表也都是fast_correlative_scan_matcher_2d.h的PrecomputationGrid2D类的成员变量:
这样扩展节点的时候,打分操作就可以直接实时查表了,而不是再进行旋转然后进行实时打分。能够大大提高实时性。
carto中的树结构
一共七层,深度为0-6,最上层(最粗糙)索引为6,最下层(最精致)索引为0
cartographer源代码补充
···
// cartographer的亮点所在!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
// 分枝定界方法
// 初始传入的candidates为最上层的候选解
// 初始candidate_depth = 7
// 初始min_score为配置参数,为=0.55
Candidate2D FastCorrelativeScanMatcher2D::BranchAndBound(
const std::vector& discrete_scans,
const SearchParameters& search_parameters,
const std::vector& candidates, const int candidate_depth,
float min_score) const {
// 检查是否是最底层(叶子层),如果已经查找到最底层了,则返回分数最高的候选解,排序在第一位的
if (candidate_depth == 0) {
// Return the best candidate.
return *candidates.begin();
}
// Candidate2D的构造
// 参数分别为:0:scan_index,即旋转序号。 0:x方向的偏移序号 0:y方向的偏移数 search_parameters:搜索参数
Candidate2D best_high_resolution_candidate(0, 0, 0, search_parameters);
best_high_resolution_candidate.score = min_score;
// 对传入的候选人candidate进行循环,即从最上层开始遍历
for (const Candidate2D& candidate : candidates) {
// 将叶子节点与某棵分枝树的非叶子节点进行比较,如果非叶子节点的分数小于之前选出的最高分叶子节点,则直接将此非叶子节点candidate及其子树全部砍掉
if (candidate.score <= min_score) {
break;
}
// 一个容器,盛放这个节点candidate引出的四个下一层的候选者
std::vector<Candidate2D> higher_resolution_candidates;
// 区域边长右移,相当于步长减半,进行分枝
const int half_width = 1 << (candidate_depth - 1);
// 对x、y偏移进行遍历,求出这一个candidate的四个子节点候选人(即最上面遍历的那个元素)
for (int x_offset : {0, half_width}) { // 只能取0和half_width
if (candidate.x_index_offset + x_offset >
search_parameters.linear_bounds[candidate.scan_index].max_x) { // 超出边界则break
break;
}
for (int y_offset : {0, half_width}) { // 只能取0和half_width xy一共遍历四个子节点
if (candidate.y_index_offset + y_offset >
search_parameters.linear_bounds[candidate.scan_index].max_y) { // 超出边界则break
break;
}
// 候选者依次推进来,一共4个
// 可以看出,分枝定界方法的分枝是向右下角的四个子节点进行分枝
higher_resolution_candidates.emplace_back(
candidate.scan_index, candidate.x_index_offset + x_offset,
candidate.y_index_offset + y_offset, search_parameters);
}
}
// 对candidate四个子节点进行打分,并将higher_resolution_candidates按照score从大到小的顺序进行排列
ScoreCandidates(precomputation_grid_stack_->Get(candidate_depth - 1),
discrete_scans, search_parameters,
&higher_resolution_candidates);
// 从此处开始递归,对分数最高的节点继续进行分支,直到最底层,然后再返回倒数第二层再进行迭代
// 如果倒数第二层的最高分没有上一个的最底层(叶子层)的分数高,则跳过,否则继续向下进行评分
// 从简单情况想,最上层节点就2个,树的深度就三层:2-1-0,每个父节点往下分两个子节点
// 先对最上层的调用BranchAndBound1(父节点2个(1和2),candidate_depth == 2,min_score=0.55)->best_high_resolution_candidate初始化构造->令其得分为min_score0.55
// ->对其中一个父节点(如1)分枝得到1.1和1.2,并进行打分,按顺序放入容器higher_resolution_candidates中 如<1.1, 1.2>代表1.1分更高->
// ->使用std::max1(0.55,BB)但并未比较,跳入下一层BB函数的调用,保留对节点2的循环(当反向回来的时候会继续循环2)
// |
// ^
// 第二次调用BB2(父节点为<1.1, 1.2>,candidate_depth == 1, min_score=0.55)->best_high_resolution_candidate初始化构造->令其得分为min_score0.55
// ->对选择其中一个父节点如1.1分枝得到1.1.1和1.1.2,并进行打分,按顺序放入容器higher_resolution_candidates中 如<1.1.2,1.1.1>代表1.1.2分最高
// ->使用std::max2(0.55,BB)但并未比较,跳入下一层BB函数的调用,保留对节点1.2循环(当反向回来的时候会继续循环1.2)
// |
// ^
// 第三次调用BB3(父节点为<1.1.2,1.1.1>,candidate_depth == 0, min_score=0.55)-> 触发if (candidate_depth == 0)返回最佳叶子节点1.1.2
// ->跳回到上一层的BB2的std::max2(0.55,1.1.2的score)一般来说会比0.55大
// ->更新best_high_resolution_candidate为1.1.2->
// ->运行之前保留着的,对1.2的循环
// ->可能会触发if (candidate.score <= min_score) 即 1.2的得分小于1.1.2的得分 直接break 那么1.2及其子树全部被减掉
// ->如果没有被剪掉即上述条件不成立,那么将1.2分为两个子节点并排序<1.2.1,1.2.2>,使用std::max2(1.1.2的得分,BB)
// |
// ^
// 调用BB,触发if (candidate_depth == 0)返回这棵分枝树的最佳叶子节点1.2.1
// ->跳回到上一层的BB2的std::max2(1.1.2的得分,1.2.1的得分)叶子节点之间进行较量 假如还是1.1.2大
// // 即不管是减掉1.2及其子树还是将1.2分到叶子了,都是保持了best_high_resolution_candidate = 1.1.2
// ->跳回到BB1的std::max1(0.55,1.1.2的score)->保持best_high_resolution_candidate = 1.1.2
// ->运行之前的保留循环父节点2->有可能父节点2直接触发if (candidate.score <= min_score)即父节点2的得分小于1.1.2的得分
// ->父节点2极其子树全部被砍掉
// ->最终结束递归,输出最佳节点为:叶子节点1.1.2
//
best_high_resolution_candidate = std::max(
best_high_resolution_candidate,
BranchAndBound(discrete_scans, search_parameters,
higher_resolution_candidates, candidate_depth - 1,
best_high_resolution_candidate.score));
}
return best_high_resolution_candidate;
}
···
参考:
论文:Real-Time Loop Closure in 2D LIDAR SLAM
论文翻译:https://blog.csdn.net/luohuiwu/article/details/88890307
论文解读:https://blog.csdn.net/weixin_36976685/article/details/84994701
栅格地图:https://zhuanlan.zhihu.com/p/21738718
参考文章链接:https://blog.csdn.net/weixin_44684139/article/details/105690084


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









