







目录
1、基本介绍
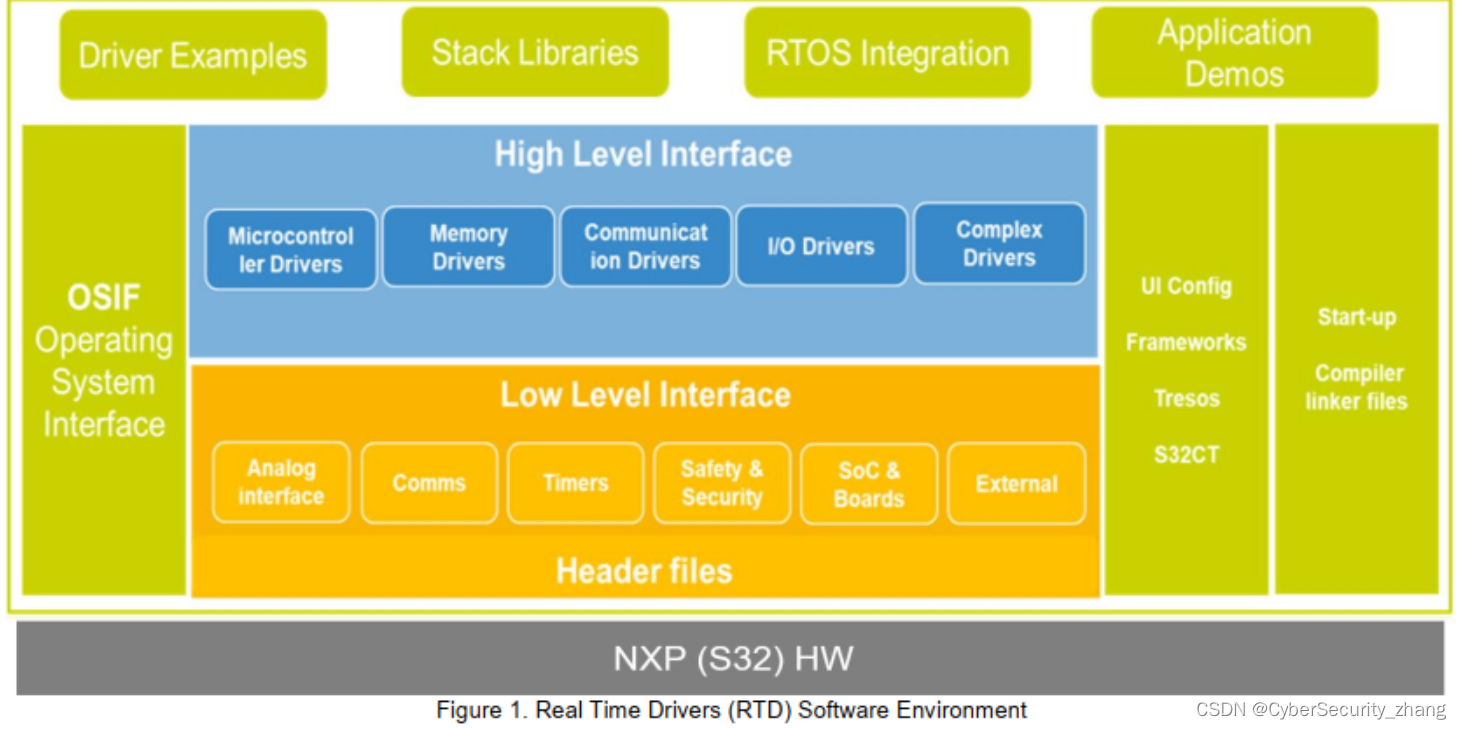
RTD(Real Time Drivers)是NXP实现的一种复杂软件接口抽象,提供给符合AUTOSAR和非AUTOSAR的产品使用(即这些产品均使用RTD抽象出来的这一套代码)。
其产品基本环境如下,High Level Interface :符合ASR的接口,以及SDK的功能API,Low Level Interface:高效的直接访问硬件寄存器的API
为什么NXP要做这样?
我们首先从开发流程来看:
- 常规SDK开发流程:使用NXP提供外设配置工具(如S32D)配置外设--->>使用SDK提供的常规API开发-->编译调试;
- AUTOSAR产品开发流程:使用EB或者Davinci配置MCAL→>使用ASR标准接口→>编译调试
那么以发送一帧CAN报文为例,不管是ASR还是Non-ASR,最后都是对同一个CAN硬件进行配置,例如报文ID、payload等;既然最后的目标一致,为什么不把配置这个动作封装为一个标准API,在这个API基础上衍生出符合SDK和ASR标准的接口。
基于这个认识,我们来看RTD的基本结构:
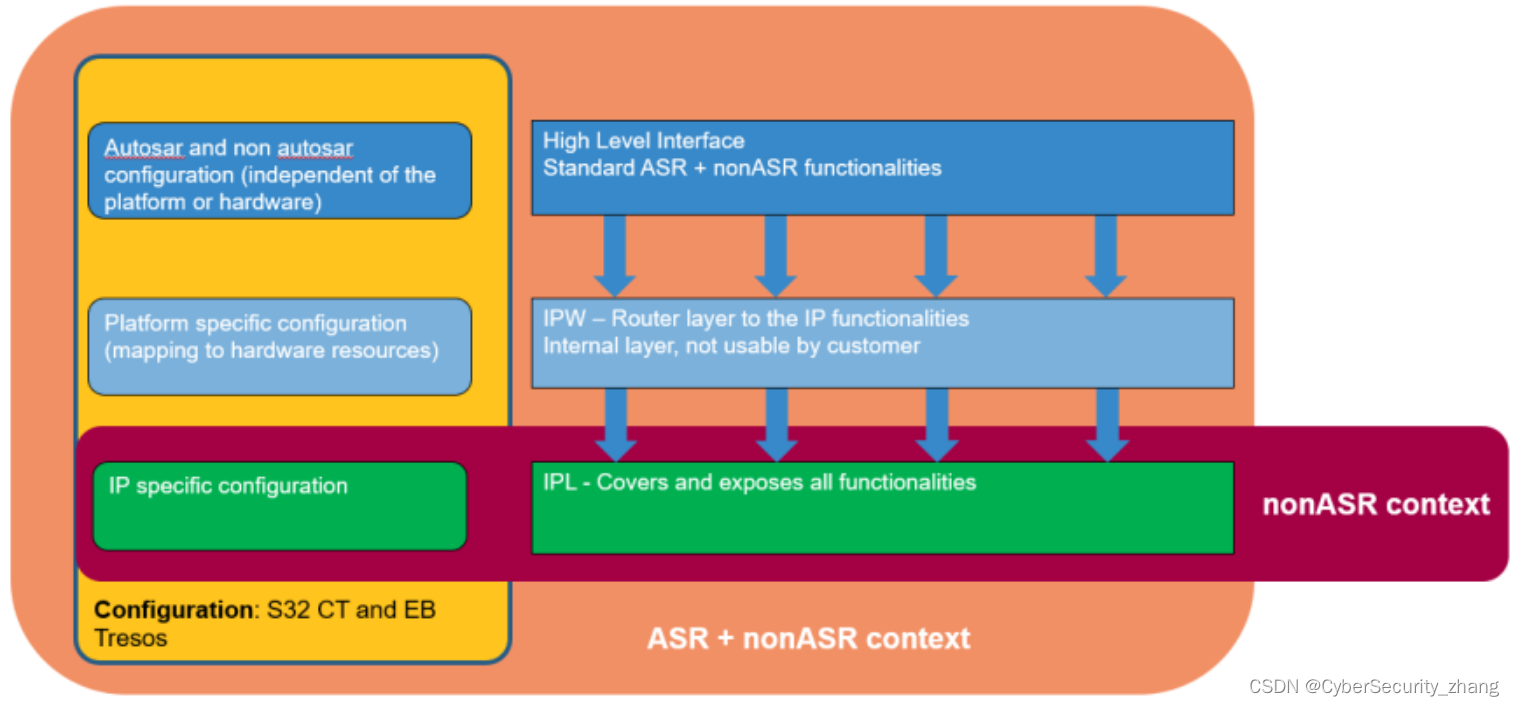
如果开发符合AUTOSAR标准的软件,使用标准接口以保持应用程序之间的可移植性,而使用该接口最终都要实施到具体的IP硬件下,因此,通过IPWrapper这一层进行封装转换;
如果开发Non-AUTOSAR的软件,可以使用ASR接口和RTD扩展的SDK通用接口(IPL)进行开发。
通过这样的方式,就可以使用NXP提供的S32D 完成ASR和非ASR的产品开发。不需要使用EB这样昂贵的MCAL配置工具。
2、准备工作
基于以上简介,我们来看看NXP提供的RTD是如何玩的
首先下载S32D,S32DS.3.5_b220726_win32.x86_64 和RTD代码包,svn路径:Z:\软件库\01通用装机软件\03-开发工具\AUTOSAR工具
参考Getting Started with the Real-Time Drivers (RTD)_NXP 半导体
Ps:安装S32D需要激活码,
安装好S32D之后,
打开程序,选择help→install new sofeware ,安装

如下
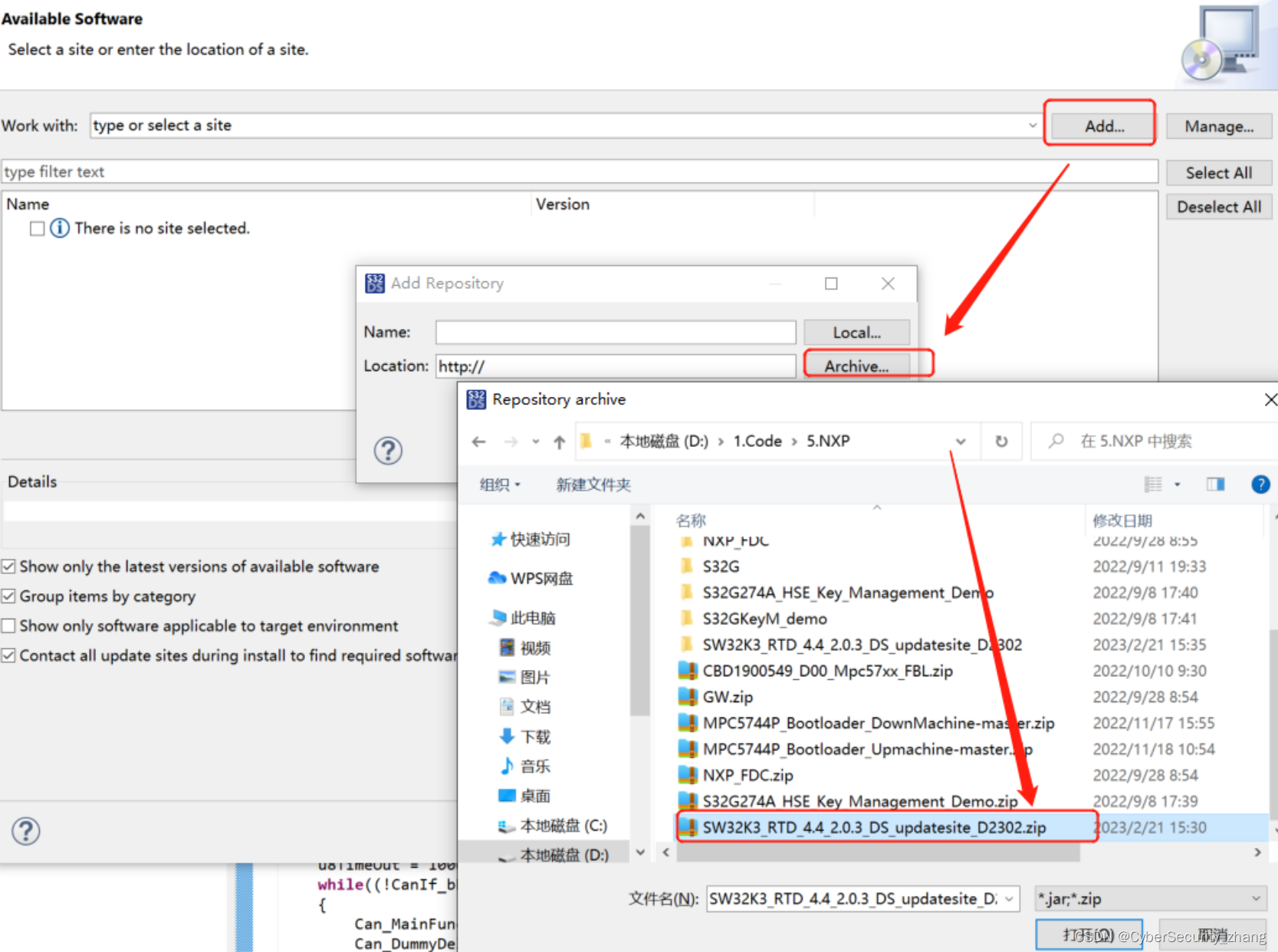
这样S32 RTD基本就可以用。那么我们从最基本的CAN demo开始看看如何配置
3、从CAN Demo开始
3.1 ASR CAN demo
首先打开S32DS,new→S32D Project from example,选择CanDemo,这一点就必须要夸夸NXP,不藏私。
3.1.1 文件概述
该demo会轮询发送接收一帧报文,来展示RTD是如何将AUTOSAR和非AUTOSAR驱动代码结合到一起。
新建一个CAN demo工程,此时只有main.c以及基本的启动diamante,如下:
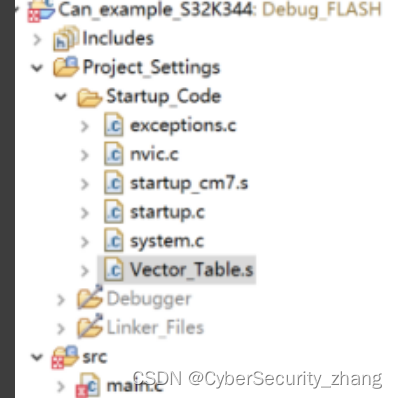
这时候编译肯定是不通过的。
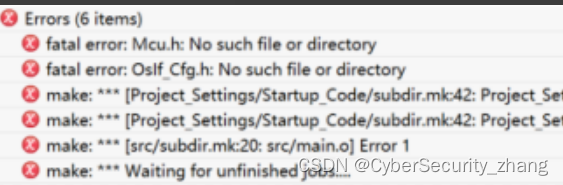
根据这个demo所要展示的效果,那么此时肯定缺少的模块有:AUTOSAR CAN D(.c和.h),结合RTD架构特点,必然也应该有CAN模块对应的非AUTOSAR 驱动代码;
参考芯片手册,可以发现,该芯片的CAN ip为Flex CAN,因此缺少FlexCan.c/.h。同时,CAN对应的port、MCU的时钟配置等,因此,总结完成CAN_demo需要的模块如下:
- CLC
- FlexCAN
- AUTOSAR CAN
- PORT
3.1.2 配置说明
首先来看S32DS的整体界面:
我们配置代码主要关注右边一排的按钮,如下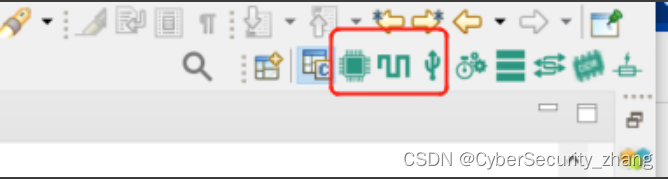
红框从左至右为引脚配置,时钟配置,外设配置
打开配置界面,如下:

这个工程初始配置只有一个时钟,因此,首先需要加入CAN模块和基本的Port模块;
打开引脚配置,进入如下界面;
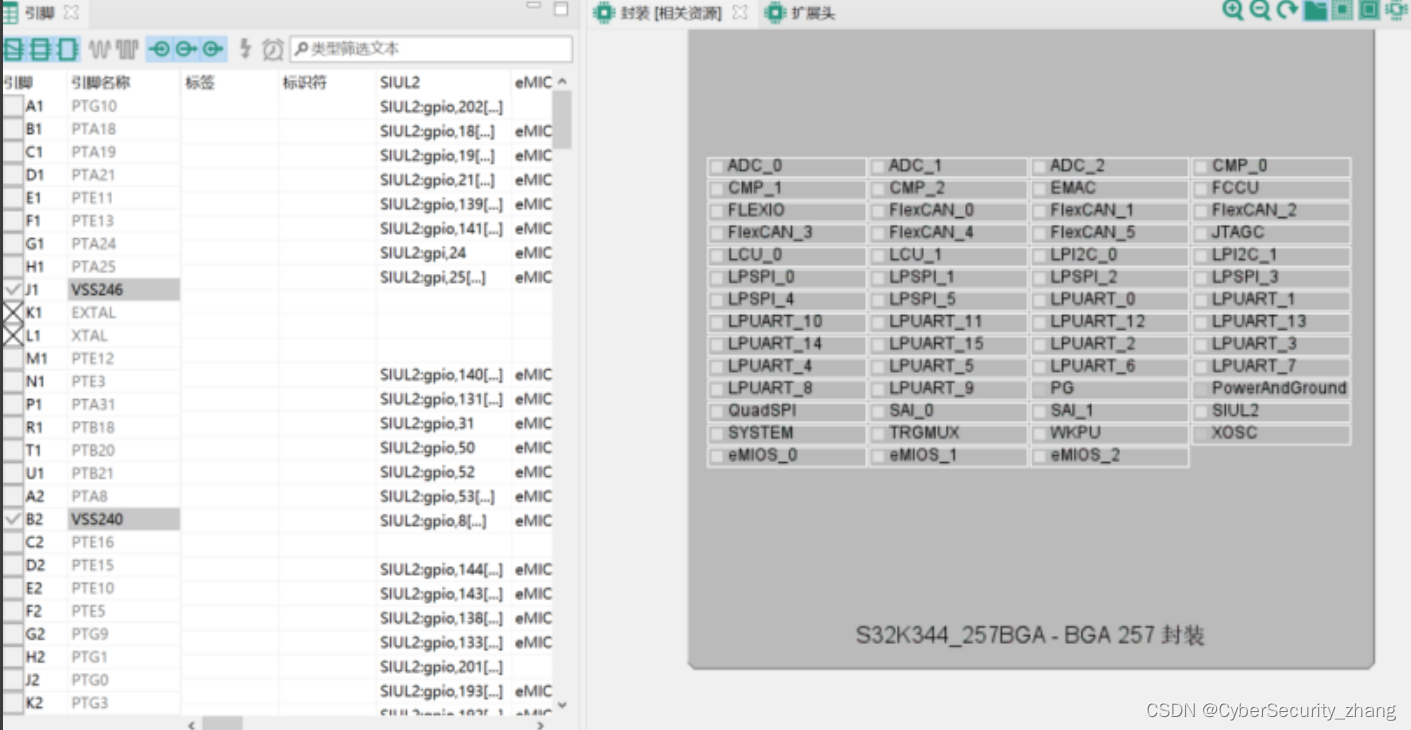
在这里选取FlexCAN_0作为测试对象,因此选取PTA27/28引脚开通CAN功能;
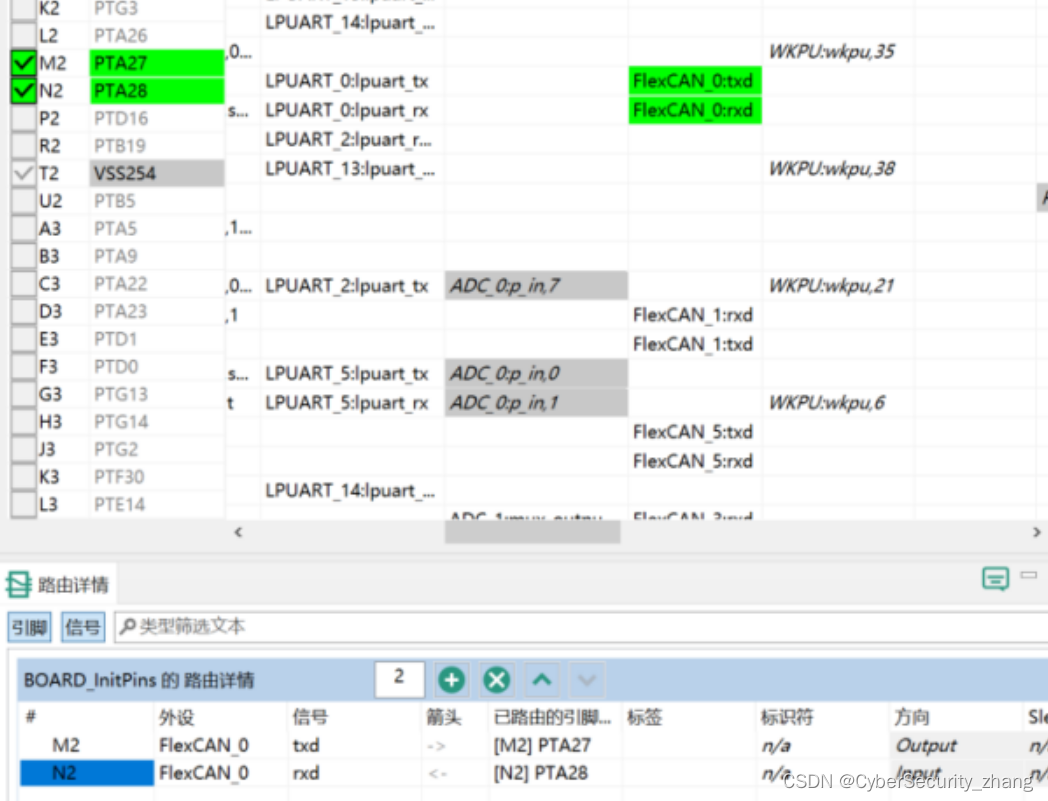
此时生成的代码如下:
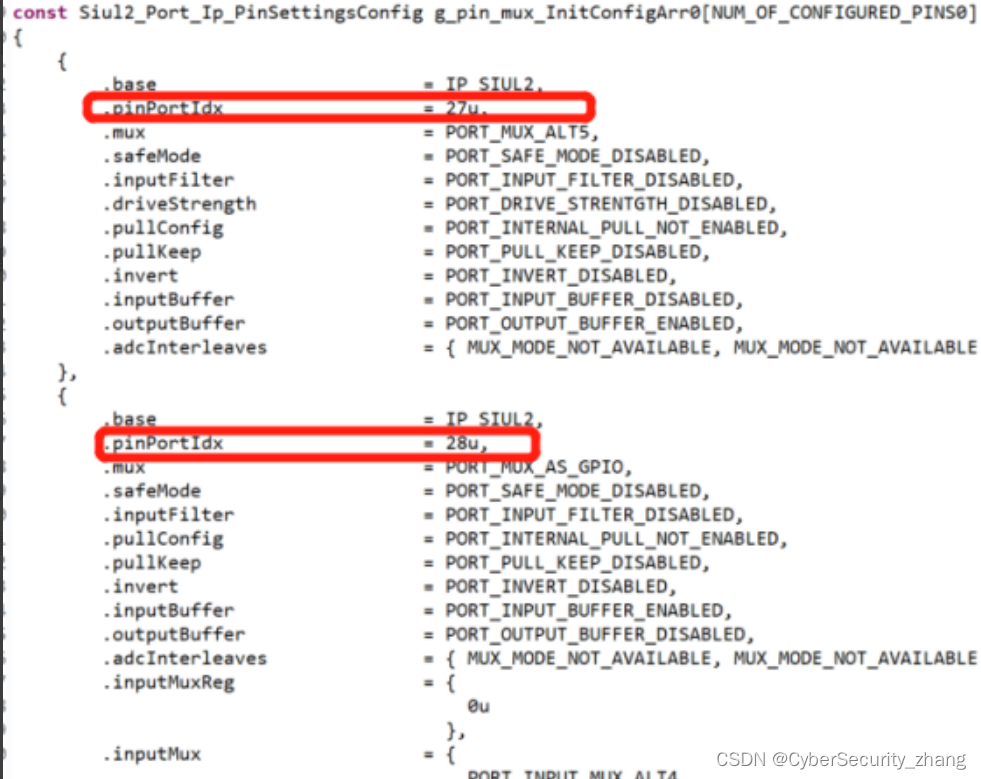
可以看到,port已经完成了配置,那么现在就应该搞外设配置了。
打开外设窗口,可以看出,工具已经把基本模块布置好了,但还有很多问题需要确认。
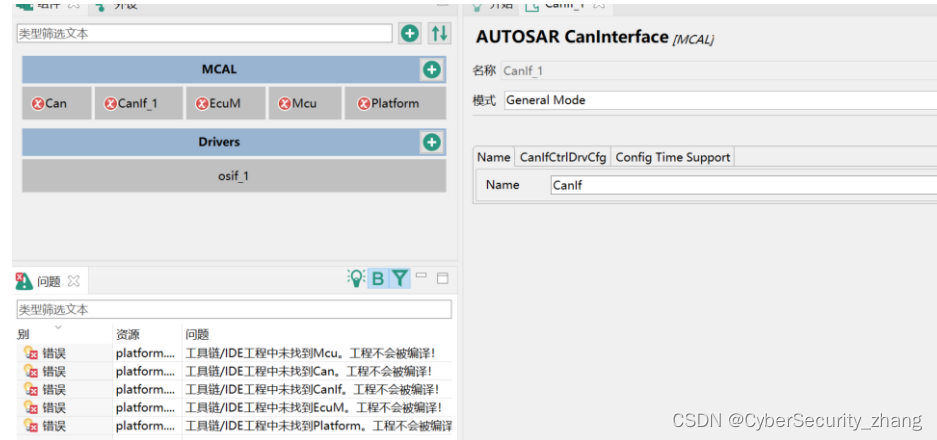
首先是上述模块均提示不会被编译,原因如下:
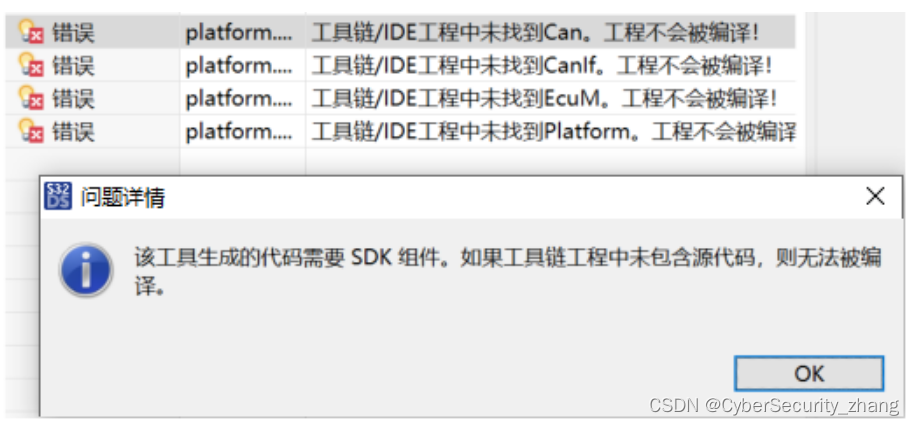
很明显,需要添加上述模块的源代码;打开SDK功能组,添加上述模块,工具自动加入源码,如下:
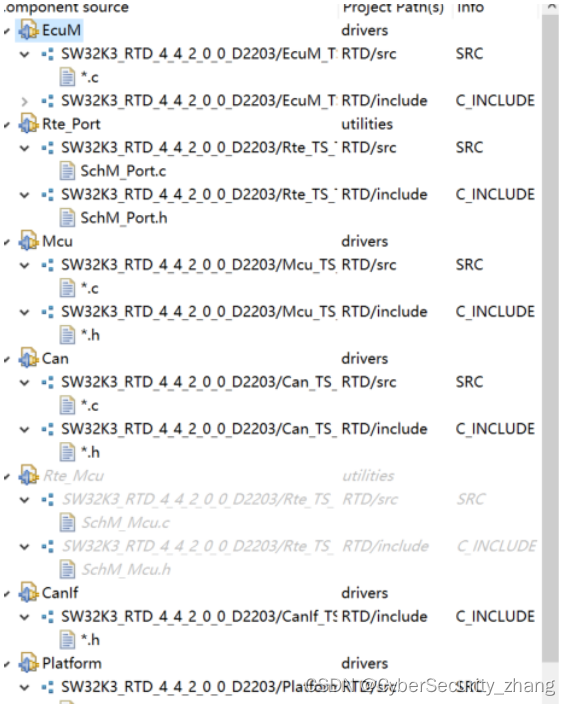
此时不更改模块例如CAN、EcuM等的配置,采用默认配置,结构如下:
更新源码后,再次编译,发现是没有头文件。

返回配置界面,添加SIUL2模块,更新代码得到如下源文件:
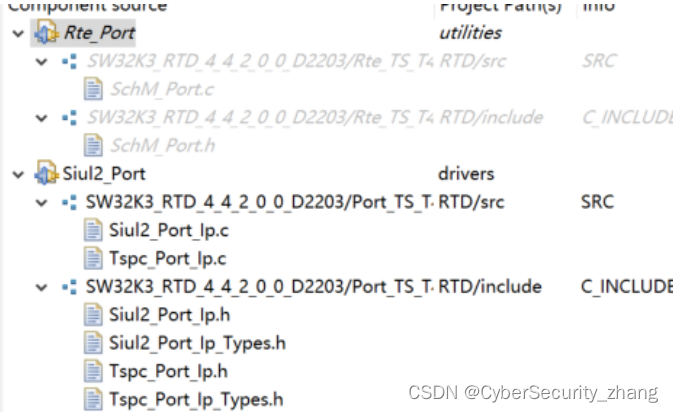
此时编译成功。
可以看到,在我对S32K这款芯片几乎不怎么熟悉的情况下,通过工具默认配置和引导,以及自身对AUTOSAR的了解,在基本不用修改代码的情况,使用RTD可以有效缩短开发时间,完成CanDemo工程搭建,从而验证控制器can功能。这和EB工具很类似。
3.1.3 文件结构
虽然编译成功了,但我没有板子跑;因此只能看看这个代码结构了,如下:
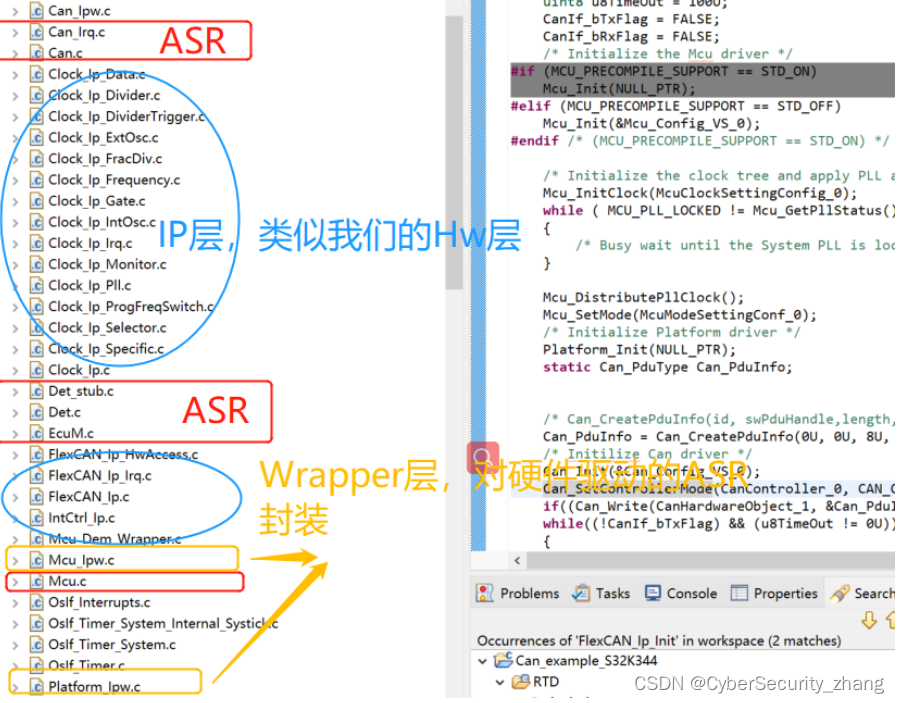
参考Can.c,梳理出AUTOSAR的MCAL代码如何和FlexCan的Non-AUTOSAR源码有效结合。
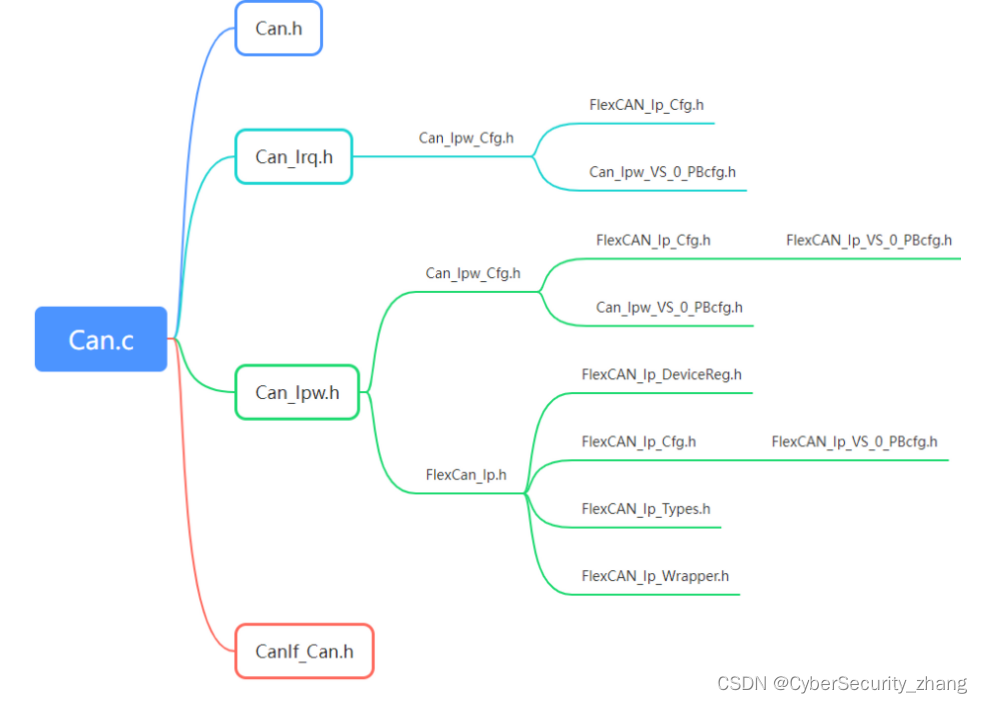
基本路径如下:
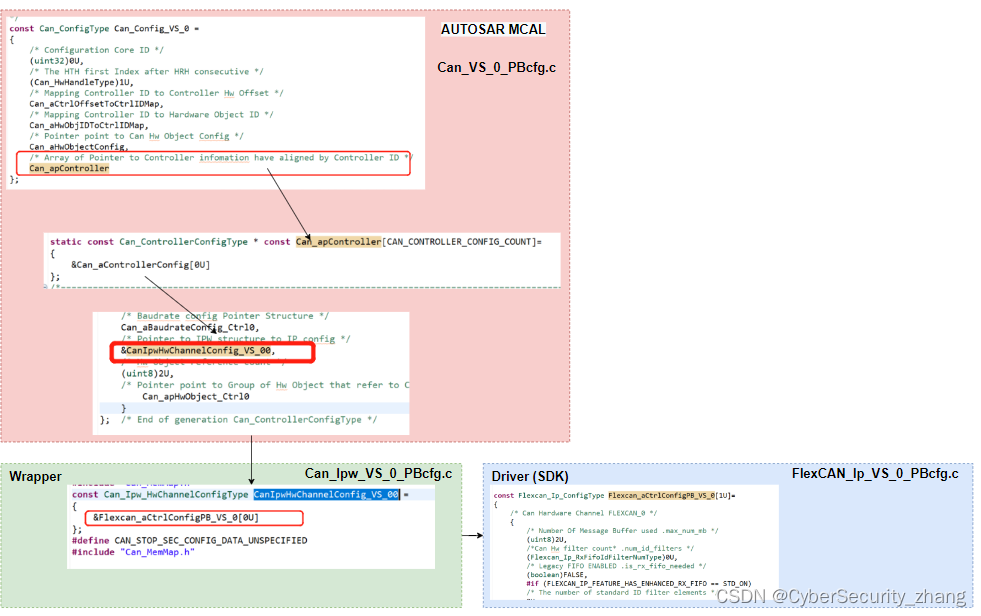
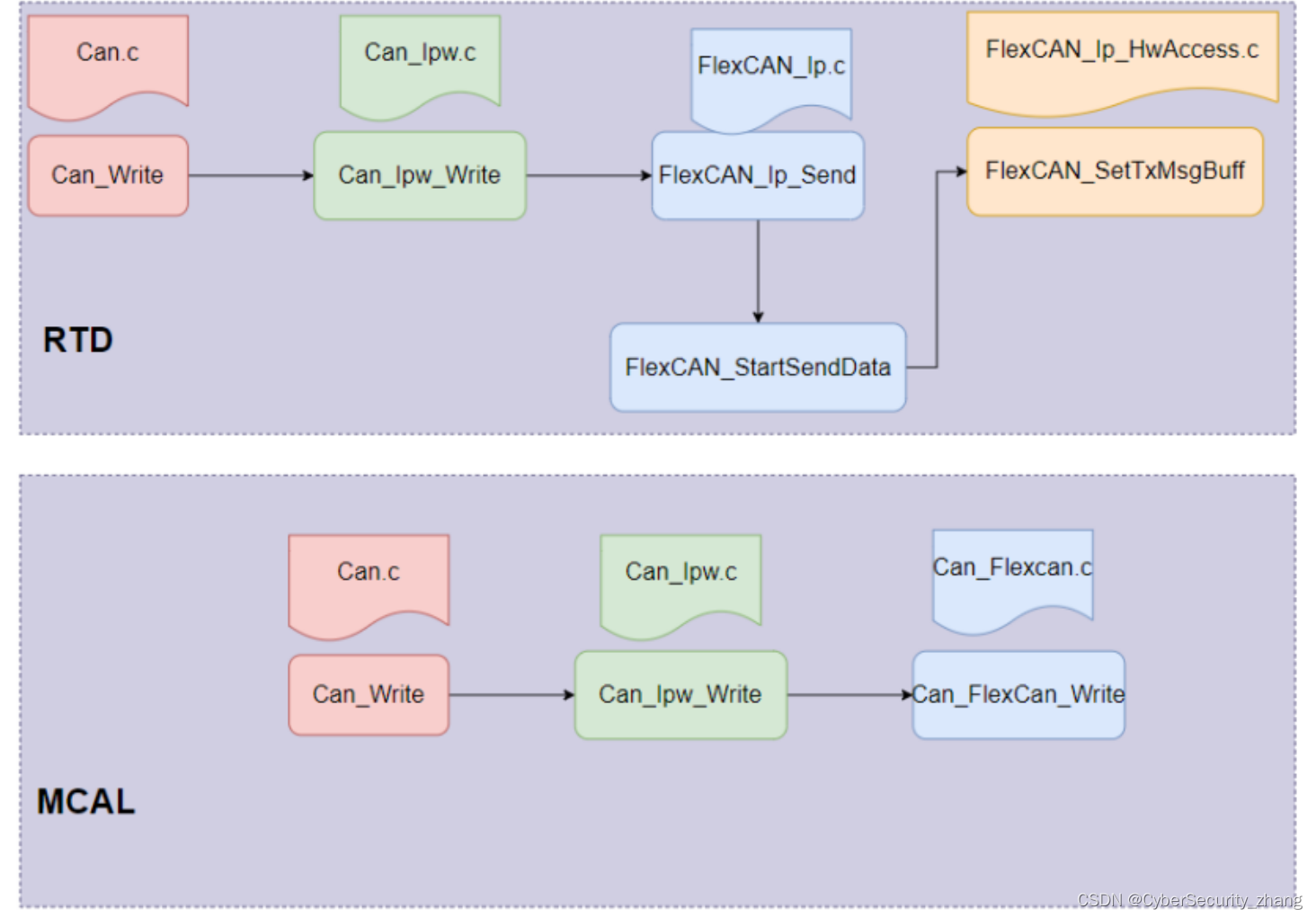
通过CAN Driver将整个硬件CAN抽象出来,然后通过Wrapper最后再到实际的Driver层进行寄存器级别的操作。 下图为NXP的MCAL和RTD对于CAN的处理。
3.2 Non-ASR can通信
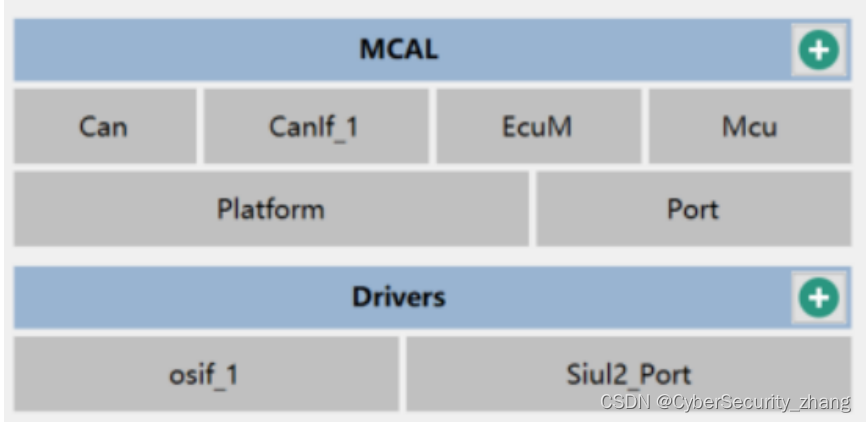
如果不使用Autosar,那么直接配置driver,也可以验证can通信,功能组件结构如下:
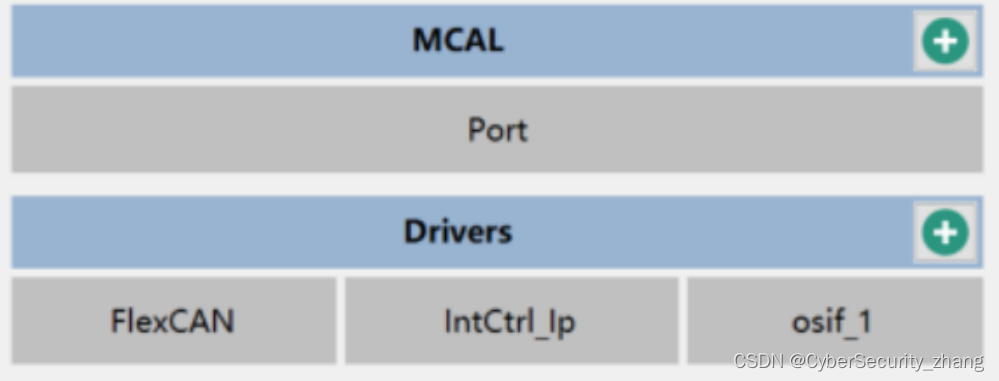
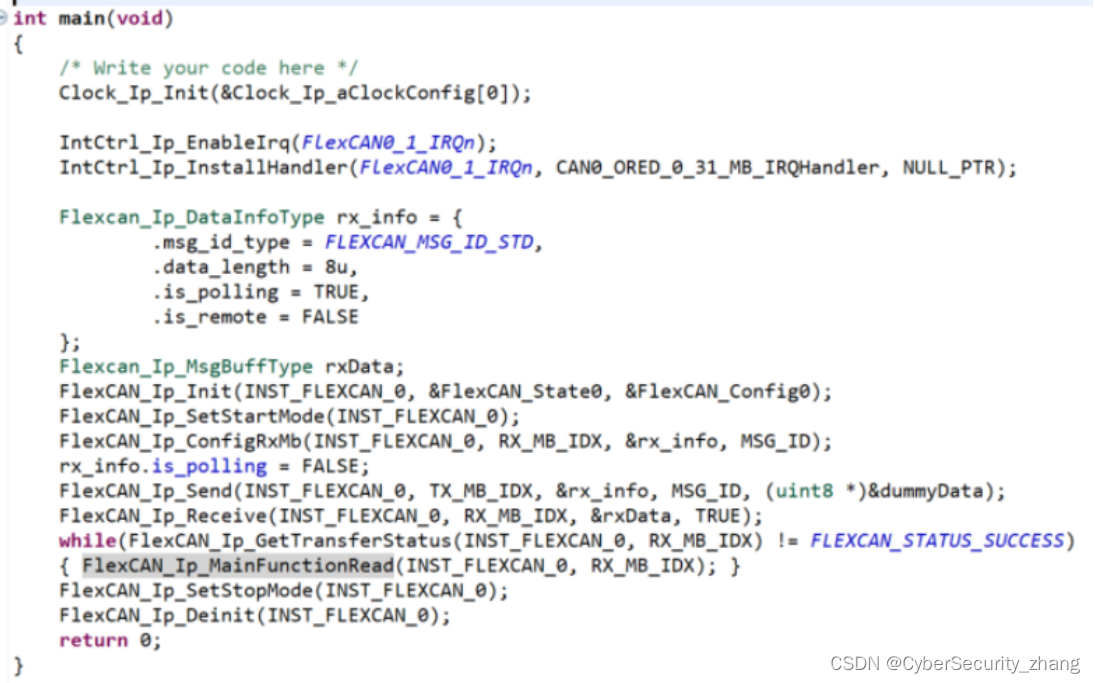
意味着可以直接使用FlexCan的API,省却了MCAL这一步骤。代码如下:
4 总结
- RTD是SDK和AUTOSAR的结合体,在代码中通过IpWrapper的方式有效地将AUTOSAR和硬件访问API结合到一起,这样只需要使用S32D即可完成AUTOSAR MCAL和SDK外设配置的要求;
- 代码开发难点:需要自上而下,理清AUTOSAR标准中驱动配置项,在此基础上优化SDK标准API,以达到用户使用ASR接口和SDK接口都能实现特定功能的目的;例如ASR API Can_Write( ),SDK API FlexCan_Ip_Send( )
- 个人认为,RTD架构是每个汽车芯片厂的必由之路,将整个SDK+AUTOSAR的生态部署好,逐步培养用户习惯;像EB这样的中间商日子可就难过了


















 979
979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











