







第四章、ROS运行管理
一、ROS元功能包
- 概念:
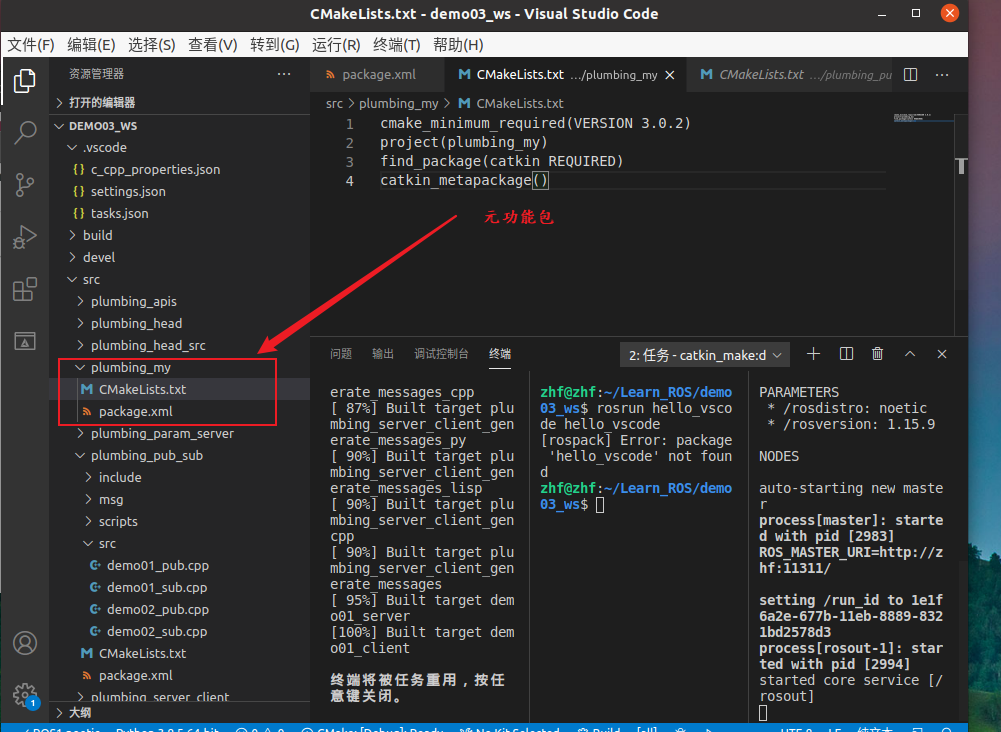
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
- 作用:
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
- 实现
首先、创建一个没有依赖的功能包
catkin_creat_pkg 包名
// catkin_creat_pkg my_bag
然后:添加依赖package.xml
<!-- 加下面这个标签 -->
<exec_depend>被集成的功能包</exec_depend>
<!-- <exec_depend>plumbing_pub_sub</exec_depend> -->
.....
<export>
<!-- 加下面这个标签 -->
<metapackage />
</export>
最后:修改CMakeList.txt
只能有这四行,不能有换行和别的、括号内容根据情况修改
cmake_minimum_required(VERSION 3.0.2)
project(plumbing_my)
find_package(catkin REQUIRED)
catkin_metapackage()
二、launch文件
概念
launch 文件是一个 XML 格式的文件,可以启动本地和远程的多个节点,还可以在参数服务器中设置参数。
作用
简化节点的配置与启动,提高ROS程序的启动效率。
使用
- 在功能包下创建launch文件夹
- 创建xxx.launch文件
- 启动launch文件
roslaunch 包名 xxx.launch
launch文件的标签
1.launch标签:
<launch>标签是所有 launch 文件的根标签,充当其他标签的容器
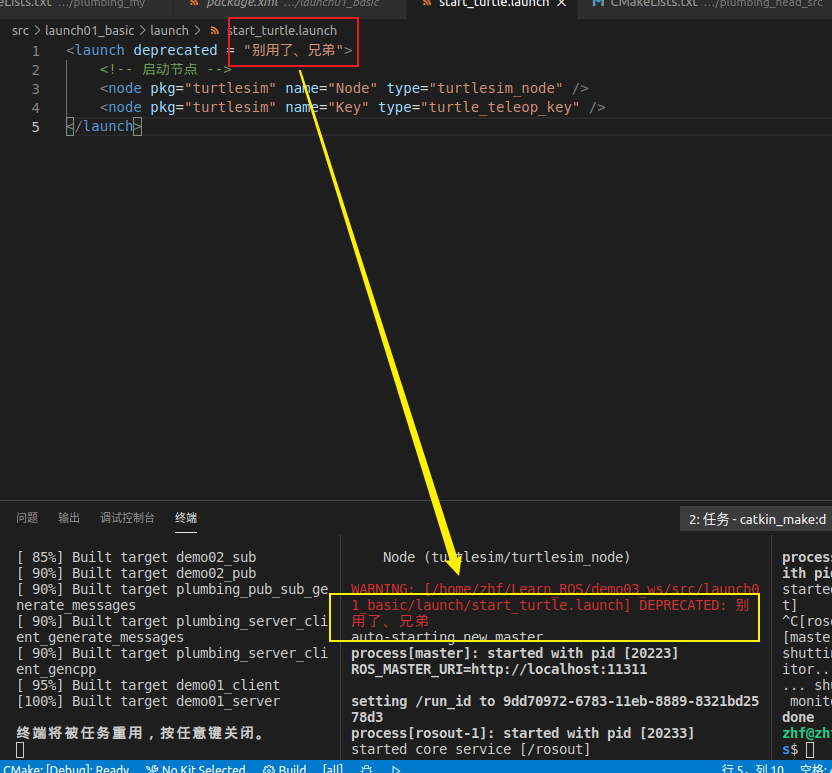
*属性:*告知用户当前 launch 文件已经弃用
deprecated = "弃用声明"、告知用户,该launch文件已经是旧版本了,不建议使用,如果使用,会在命令行提示用户
<launch deprecated = "别用了、兄弟">
<!-- 启动节点 -->
<node pkg="turtlesim" name="Node" type="turtlesim_node" />
<node pkg="turtlesim" name="Key" type="turtle_teleop_key" />
</launch>
子集标签:所有其它标签都是launch的子级
2.node标签
<node>标签用于指定 ROS 节点,是最常见的标签,需要注意的是: roslaunch 命令不能保证按照 node 的声明顺序来启动节点(节点的启动是多进程的)
- 属性
<!-- node -->
<!-- pkg="包名" 节点所属的包 -->
<!-- type="节点类型" 节点类型(与之相同名称的可执行文件) -->
<!-- name="节点名称" 节点名称(在 ROS 网络拓扑中节点的名称) -->
<!-- output="log | screen" 日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log -->
<!-- ns="xxx" 在指定命名空间 xxx 中启动节点 -->
<!-- machine="机器名" 在指定机器上启动节点 -->
<!-- respawn="true | false" 如果节点退出,是否自动重启(默认是false) -->
<!-- respawn_delay="N" 如果 respawn 为 true, 那么延迟 N 秒后启动节点 -->
<!-- args="xxx xxx xxx" 将参数传递给节点 -->
<!-- required="true | false" 该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch -->
<!-- clear_params="true | false" 在启动前,删除节点的私有空间的所有参数 -->
3.include文件标签
include标签用于将另一个 xml 格式的 launch 文件导入到当前文件
- 属性
<!-- file="$(find 包名)/xxx/xxx.launch" 要包含的文件路径 -->
<!-- ns="xxx" 在指定命名空间导入文件 -->
<launch>
<include file="$(find launch01_basic)/launch/start_turtle.launch" />
</launch>
4.remap文件标签,node的子集标签
重映射节点名称
- 属性
<!-- from="xxx" 原始话题名称 -->
<!-- to="yyy" 目标名称 -->
<node pkg="turtlesim" name="Node" type="turtlesim_node" respawn="true" respawn_delay="10">
<remap from="/turtle1/cmd_vel" to="/cmd_vel" />
</node>
<node pkg="turtlesim" name="Key" type="turtle_teleop_key" />
5.param参数标签
<param>标签主要用于在参数服务器上设置参数,参数源可以在标签中通过 value 指定,也可以通过外部文件加载,在<node>标签中时,相当于私有命名空间。
- 属性
<!-- name="命名空间/参数名" 参数名称,可以包含命名空间 -->
<!-- value="xxx" 定义参数值,如果此处省略,必须指定外部文件作为参数源 -->
<!-- type="str | int | double | bool | yaml" 指定参数类型,如果未指定,roslaunch 会尝试确定参数类型 -->
<!-- 规则如下:
如果包含 '.' 的数字解析未浮点型,否则为整型
"true" 和 "false" 是 bool 值(不区分大小写)
其他是字符串
-->
<!-- 定义在node外 -->
<param name="param_A" type="int" value="100" />
<node pkg="turtlesim" name="Node" type="turtlesim_node" respawn="true" respawn_delay="10">
<!-- 定义在node内 -->
<param name="param_B" type="double" value="3.14" />
</node>
6.rosparam参数标签和yaml交互
<rosparam>标签可以从 YAML 文件导入参数,或将参数导出到 YAML 文件,也可以用来删除参数,<rosparam>标签在<node>标签中时被视为私有。
- 属性
<launch>
<!-- command="load | dump | delete" (默认 load) 加载、导出或删除参数 -->
<!-- file="$(find 包名)/xxx.../yyy.yaml" 加载或导出到的 yaml 文件 -->
<!-- param="参数名称" -->
<!-- ns="命名空间" -->
<rosparam command="dump" file="$(find launch01_basic)/launch/params_out.yaml" />
<rosparam command="delete" param="bg_B"/>
</launch>
<launch>
<!-- 定义在node外 -->
<!-- 从yaml中加载参数 -->
<rosparam command="load" file="$(find launch01_basic)/launch/params.yaml" />
<node pkg="turtlesim" name="Node" type="turtlesim_node" respawn="true" respawn_delay="10">
<!-- 定义在node内 -->
<rosparam command="load" file="$(find launch01_basic)/launch/params.yaml" />
</node>
</launch>
7.group标签
<group>标签可以对节点分组,具有 ns 属性,可以让节点归属某个命名空间
- 属性
<!-- ns="名称空间" -->
<!-- clear_params="true | false" 启动前,是否删除组名称空间的所有参数(慎用....此功能危险) -->
<launch>
<group ns="first">
<node pkg="turtlesim" name="Node" type="turtlesim_node" respawn="true" respawn_delay="10"/>
<node pkg="turtlesim" name="Key" type="turtle_teleop_key" />
</group>
<group ns="second">
<node pkg="turtlesim" name="Node" type="turtlesim_node" respawn="true" respawn_delay="10"/>
<node pkg="turtlesim" name="Key" type="turtle_teleop_key" />
</group>
</launch>
8.arg动态传参
<arg>标签是用于动态传参,类似于函数的参数,可以增强launch文件的灵活性
- 属性
<launch>
<!-- name="参数名称" -->
<!-- default="默认值" (可选) -->
<!-- value="数值" (可选) 不可以与 default 并存 -->
<!-- doc="描述" 参数说明 -->
<arg name="car_length" default="0.5"/>
<param name="A" value="$(arg car_length)"/>
<param name="B" value="$(arg car_length)"/>
<param name="C" value="$(arg car_length)"/>
</launch>
三、工作空间覆盖
- 所谓覆盖就是存在不同工作空间下的相同功能包时,在调用时,会调用后刷新的
ROS 会解析 .bashrc 文件,并生成 ROS_PACKAGE_PATH ROS包路径,该变量中按照 .bashrc 中配置设置工作空间优先级,在设置时需要遵循一定的原则:ROS_PACKAGE_PATH 中的值,和 .bashrc 的配置顺序相反—>后配置的优先级更高,如果更改自定义空间A与自定义空间B的source顺序,那么调用时,将进入工作空间A。
四、节点名称重名
1.rosrun设置命名空间与重映射(起别名)
- 设置命名空间演示
语法: rosrun 包名 节点名 __ns:=新名称
rosrun turtlesim turtlesim_node __ns:=/xxx
rosrun turtlesim turtlesim_node __ns:=/yyy
- 运行结果:用
rosnode list查看
/xxx/turtlesim
/yyy/turtlesim
- 为节点起别名
语法: rosrun 包名 节点名 __name:=新名称
rosrun turtlesim turtlesim_node __name:=t1
rosrun turtlesim turtlesim_node __name:=t2
- 运行结果:用
rosnode list查看
/t1
/t2
- rosrun命名空间与名称重映射叠加
语法: rosrun 包名 节点名
__ns:=新名称__name:=新名称
rosrun turtlesim turtlesim_node __ns:=/xxx __name:=tn
- 运行结果:用
rosnode list查看
/xxx/tn

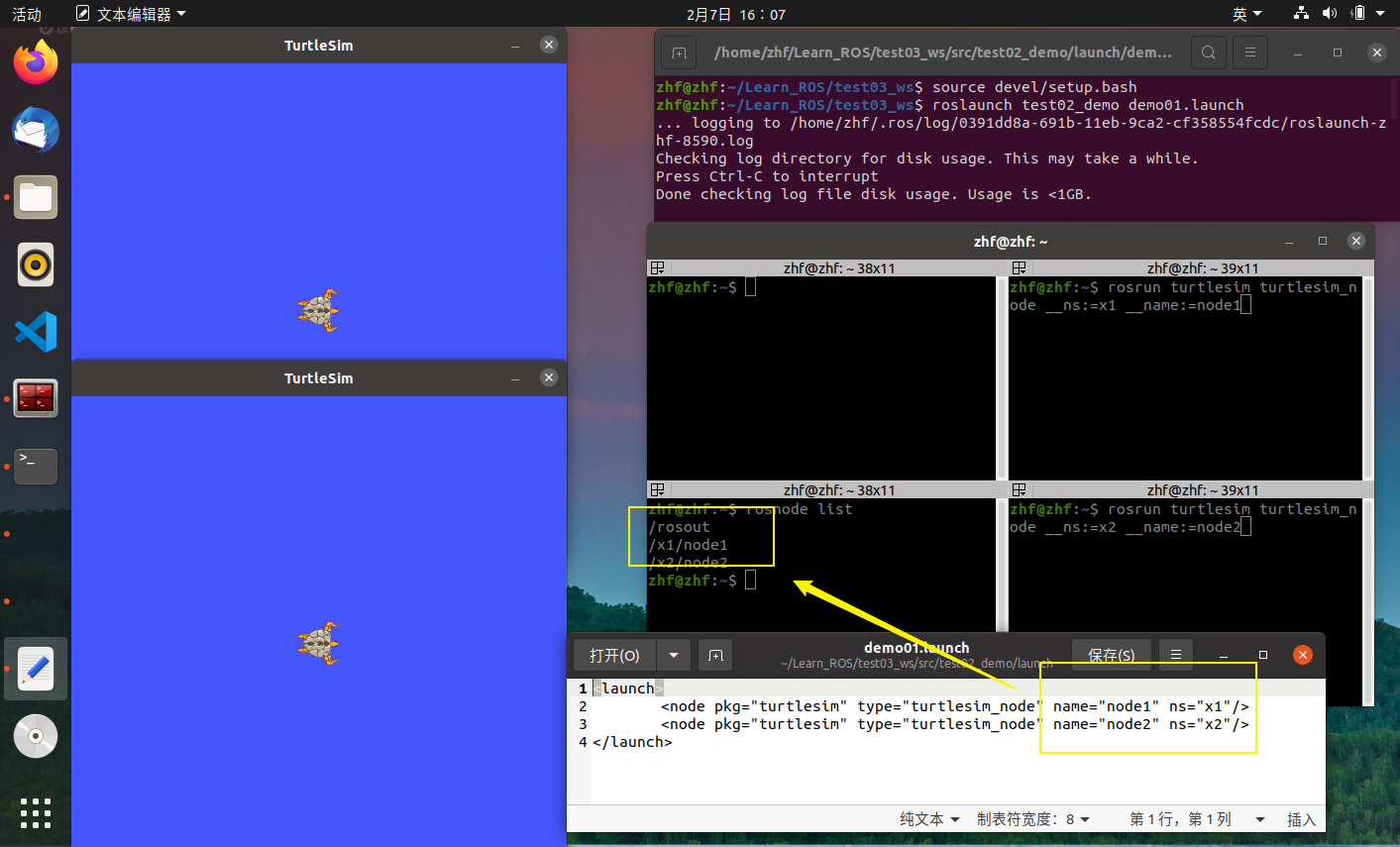
2.launch文件设置命名空间与重映射(起别名)
语法:
<!-- ns="xxx" 在指定命名空间 xxx 中启动节点 -->
<!-- name="节点名称" 节点名称(在 ROS 网络拓扑中节点的名称) -->
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="node1" ns="x1"/>
<node pkg="turtlesim" type="turtlesim_node" name="node2" ns="x2"/>
</launch>
- 运行结果:用
rosnode list查看
/rosout
/x1/node1
/x2/node2
3.编码设置命名空间与重映射(起别名)
- 名称设别名
语法:为节点名随机添加一个后缀
核心代码:
ros::init(argc,argv,"zhangsan",ros::init_options::AnonymousName);
- 设置命令空间
语法:cpp
std::map<std::string, std::string> map;
map["__ns"] = "xxxx";
ros::init(map,"wangqiang");
五、话题名称重名
1.rosrun设置重映射
- 重映射
语法:rosrun名称重映射语法: rorun 包名 节点名 话题名:=新话题名称
rosrun turtlesim turtlesim_node /turtle1/cmd_vel:=/cmd_vel
2.launch文件设置重映射
语法:
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="t1"/>
<node pkg="teleop_twist_keyboard" type="teleop_twist_keyboard.py" name="key">
<remap from="/cmd_vel" to="/turtle1/cmd_vel"/>
</node>
</launch>

3.编码设置命名空间与重映射
话题的名称与节点的命名空间、节点的名称是有一定关系的,话题名称大致可以分为三种类型:
- 全局(话题参考ROS系统,与节点命名空间平级)
- 相对(话题参考的是节点的命名空间,与节点名称平级)
- 私有(话题参考节点名称,是节点名称的子级)

- 全局
语法:以
/开头的名称,和节点名称无关
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<std_msgs::String>("/chatter",1000);
- 结果
/chatter
- 相对
语法:非
/开头的名称,参考命名空间(与节点名称平级)来确定话题名称
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",1000);
- 结果:
xxx/chatter
- 私有
语法:以
~开头的名称
ros::NodeHandle nh("~");
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",1000);
- 结果:
/xxx/hello/chatter
- 当全局和私有共同存在时,全局的优先级更高
六、参数名称重名
1.rosrun设置参数
- 设置的是私有的参数
语法: rosrun 包名 节点名称 _参数名:=参数值
rosrun turtlesim turtlesim_node _A:=100
- 结果:
/turtlesim/A
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
2.launch文件设置参数
第二部分讲过
3.编码设置参数
ros::param设置
语法:
ros::param::set("/set_A",100); //全局,和命名空间以及节点名称无关
ros::param::set("set_B",100); //相对,参考命名空间
ros::param::set("~set_C",100); //私有,参考命名空间与节点名称
- 结果:假设设置的 namespace 为 xxx,节点名称为 yyy,使用 rosparam list 查看
/set_A
/xxx/set_B
/xxx/yyy/set_C
ros::NodeHandle设置参数
语法:
ros::NodeHandle nh;
nh.setParam("/nh_A",100); //全局,和命名空间以及节点名称无关
nh.setParam("nh_B",100); //相对,参考命名空间
ros::NodeHandle nh_private("~");
nh_private.setParam("nh_C",100);//私有,参考命名空间与节点名称
- 结果:假设设置的 namespace 为 xxx,节点名称为 yyy,使用 rosparam list 查看
/nh_A
/xxx/nh_B
/xxx/yyy/nh_C
七、分布式通信
ROS是一个分布式计算环境。一个运行中的ROS系统可以包含分布在多台计算机上多个节点。根据系统的配置方式,任何节点可能随时需要与任何其他节点进行通信。
因此,ROS对网络配置有某些要求:
- 所有端口上的所有机器之间必须有完整的双向连接。
- 每台计算机必须通过所有其他计算机都可以解析的名称来公告自己。
实现
1.准备
先要保证不同计算机处于同一网络中,最好分别设置固定IP,如果为虚拟机,需要将网络适配器改为桥接模式;
2.配置文件修改
分别修改不同计算机的 /etc/hosts 文件,在该文件中加入对方的IP地址和计算机名:
IP地址查看名:ifconfig
计算机名称查看:hostname
主机端:
从机的IP 从机计算机名
从机端:
主机的IP 主机计算机名
设置完毕,可以通过 ping 命令测试网络通信是否正常。
ping 主机ip

3.配置主机IP
配置主机的 IP 地址,~/.bashrc 追加
export ROS_MASTER_URI=http://主机IP:端口号
export ROS_HOSTNAME=主机IP
4.配置从机IP
配置从机的 IP 地址,从机可以有多台,每台都做如下设置,~/.bashrc 追加
export ROS_MASTER_URI=http://主机IP:端口号
export ROS_HOSTNAME=从机IP
测试
1.主机启动 roscore(必须)
2.主机启动订阅节点,从机启动发布节点,测试通信是否正常
3.反向测试,主机启动发布节点,从机启动订阅节点,测试通信是否正常















 535
535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









