







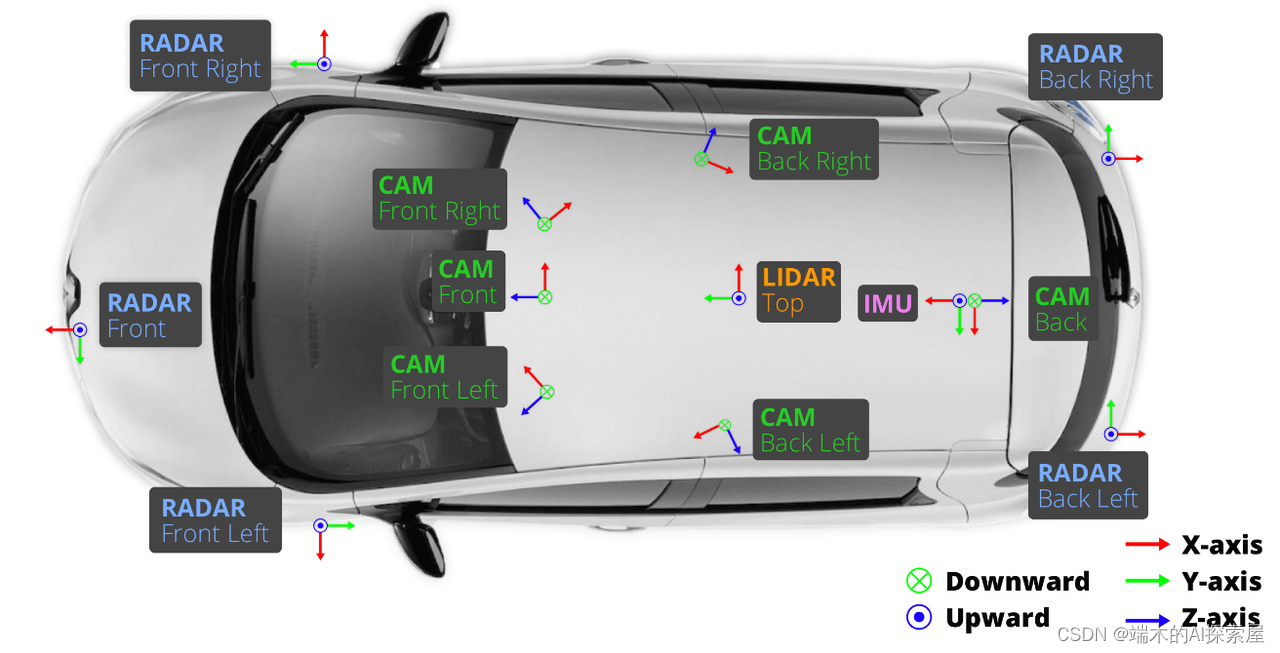
Nuscenes数据集采集数据车辆传感器布局
一、相机图像
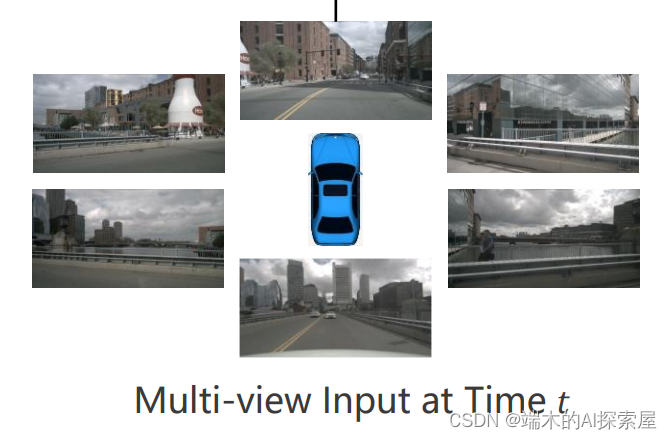
与普通2D检测输入有何不同?
- 视角: BEVfusion需要多个视角,而普通2D检测通常只需要单一视角。
- 时间同步: BEVfusion需要时间同步以融合多种传感器数据,而普通2D检测通常不需
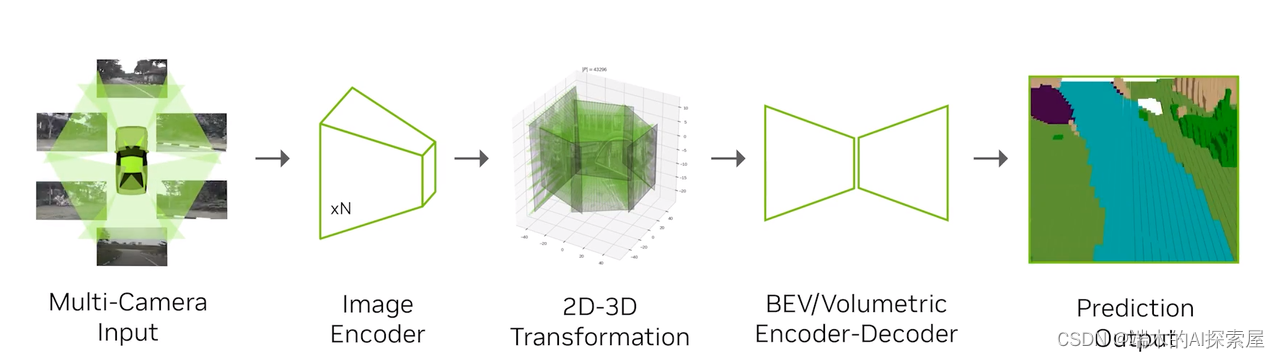
 BEVFormer论文图
BEVFormer论文图
nvidaiB站视频NVIDIA自动驾驶实验室:为自动驾驶汽车带来先进3D Occupancy预测
- 优点:
- 丰富的视觉信息:能够捕捉到颜色、纹理等丰富的视觉信息。
- 成本低:相对于LiDAR和雷达,摄像头通常更便宜。
- 缺点:
- 光照依赖:在低光或逆光条件下性能下降。
- 无法直接测距:需要额外的算法或与其他传感器融合来估计距离。
- 环境敏感:对天气和光照条件敏感。
二、LIDAR
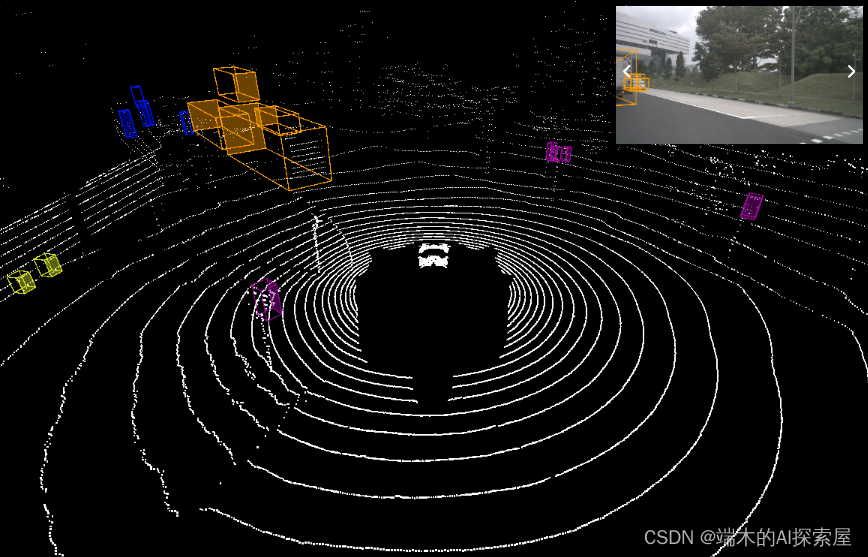
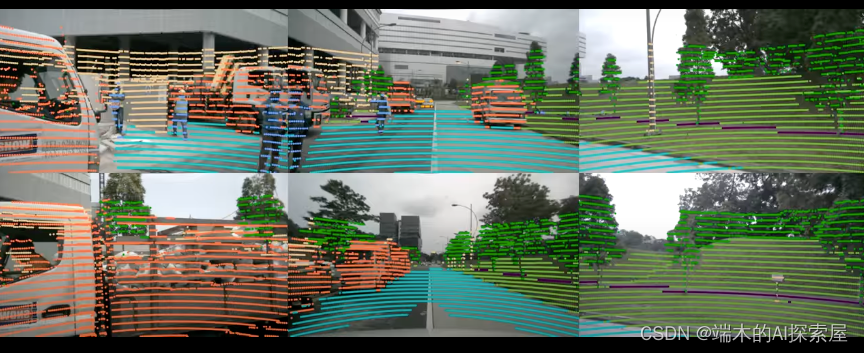
Nuscenes数据集某场景某帧可视化效果,白色点为激光雷达点云可视化效果
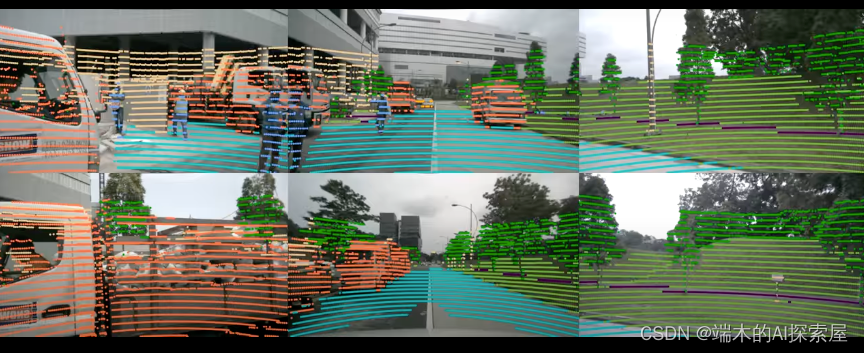
Nuscenes数据集点云通过内外参矩阵投影到图片上的效果
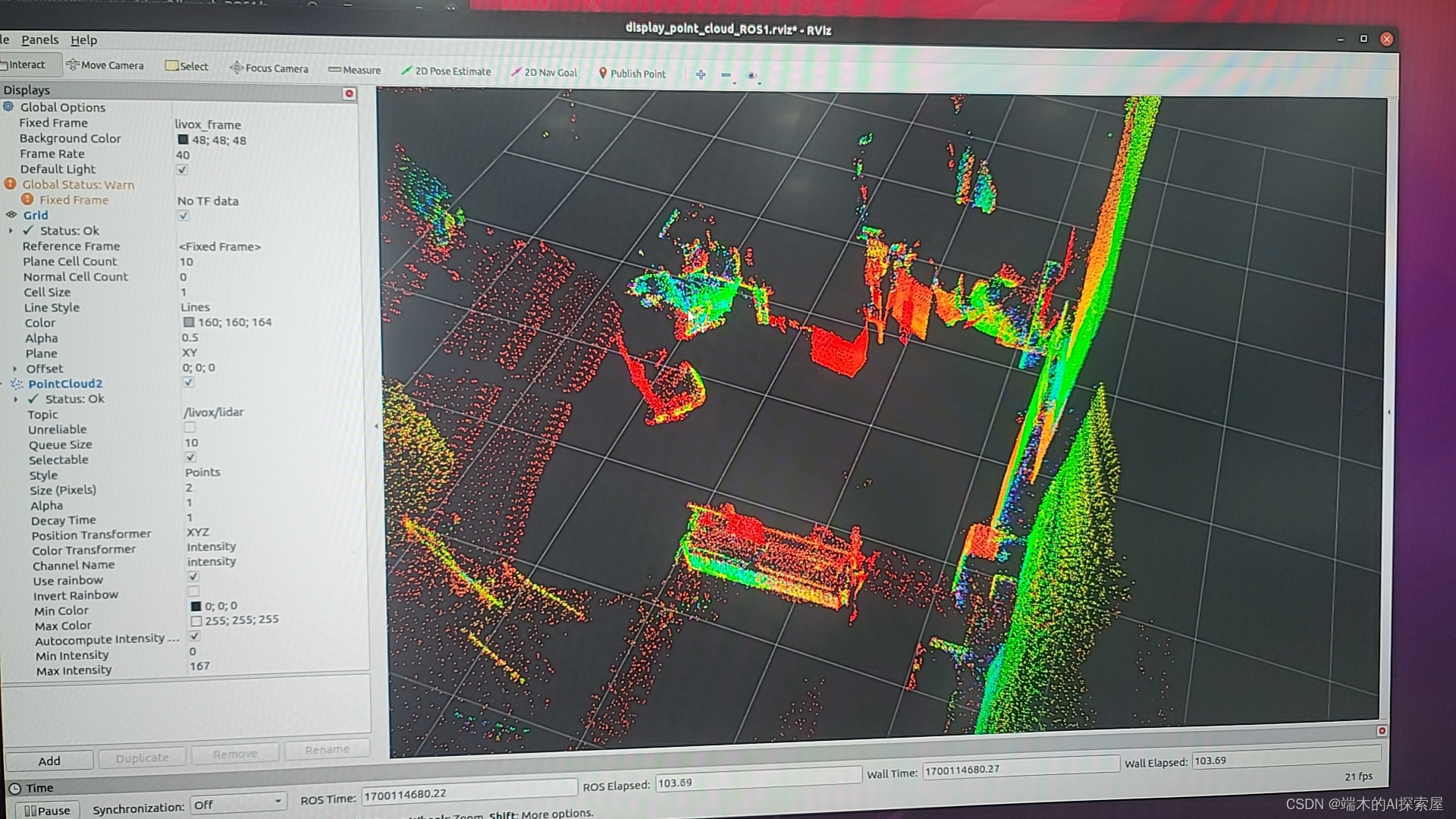
激光雷达室内可视化效果
- 优点:
- 高精度三维测量:能够生成高精度的三维点云数据。
- 高角度分辨率:能够捕捉到更细致的目标细节。
- 光照条件不敏感:白天、夜晚等光照因素影响不大
- 缺点:
- 成本较高:高精度的LiDAR系统通常成本较高。
- 环境敏感:对雾、雨、雪等恶劣天气条件相对敏感。
- 数据处理需求高:生成的数据量大,需要更多的计算资源进行处理。
三、RADAR
-
雷达(RADAR)技术相对于LiDAR和摄像头来说,更早地被应用于汽车上。老牌!
- 自适应巡航控制(ACC):雷达在汽车上最早的应用之一,用于测量前方车辆的速度和距离,以自动调整巡航速度。
- Nuscenes数据集中有,但是BEVFusion中没有用到,最新版本中用到了RADAR的数据。
-
优点:
- 高精度距离和速度测量:能够准确地测量目标对象的距离和速度。
- 环境适应性强:对雨、雾、雪等恶劣天气条件相对不敏感。
- 光照不依赖:在夜间或低光环境下也能有效工作。
- 广覆盖范围:通常能够覆盖较大的观测范围。
- 抗干扰能力强:具有很强的抗电子干扰能力。
-
缺点:
- 低角度分辨率:相对于LiDAR和摄像头,角度分辨率通常较低。
- 数据复杂性:需要复
杂的算法来解析和利用雷达数据。















 2059
2059

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









