







配置TCP/IP:按MENU—SETUP—NEXT—HOSTCOMM,选择TCP/IP—按ENTER或者F3[DETAIL]
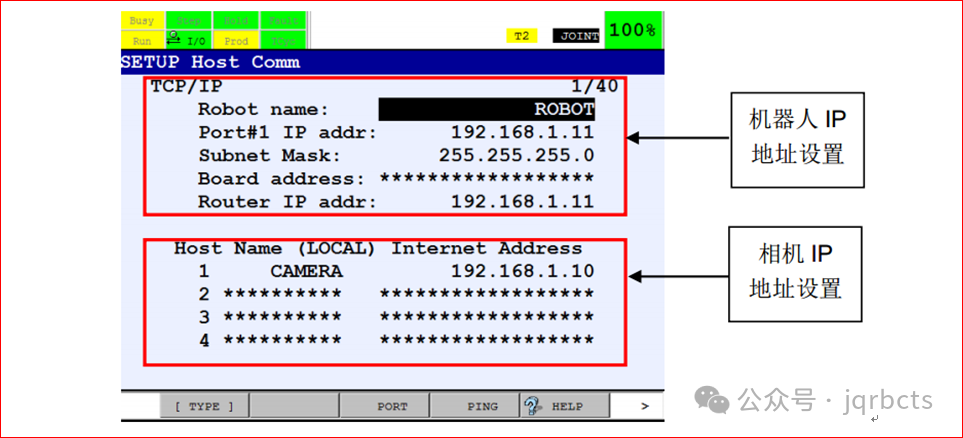
Port#1 IP addr:输入机器人IP地址,按ENTER后输入,如192.168.1.11;如果控制柜有2个网络端口,则按F3[PORT]进行切换Port#1或者Port#2。
Subnet Mask:子网掩码,默认为255.255.255.0;
Router IP addr:路由IP地址,可不设置;
Host Name:输入主机(plc)名称,按ENTER后输入,如PLC;
Internet Address:输入主机(plc)IP,按ENTER后输入,如192.168.1.10前三位与机器人IP必须一致。
上述设定完毕后,机器人重启。重启后置光标在Host Name下的CAMERA所在行,按下F4 [PING],确认该IP地址已被识别。
Ethernet I/P设置
机器人侧Ethernet I/P 参数
MENU――I/O――NEXT――选择EtherNet/IP
首先确认Enable状态为FALSE,然后将光标移至TYP列,按F4键切换成SCN。再将光标移至Connection1列,按F4 [CONFIG]
Name/IP address:192.168.1.10,即前面设定的相机地址;
Vendor Id:厂商ID,参见相机软件的eds文件;
Device Type:设备类型,参见相机软件的eds文件;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 8669
8669

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











