






最优控制和轨迹规划学习笔记
包含多个实际案例
倒立摆上翻控制
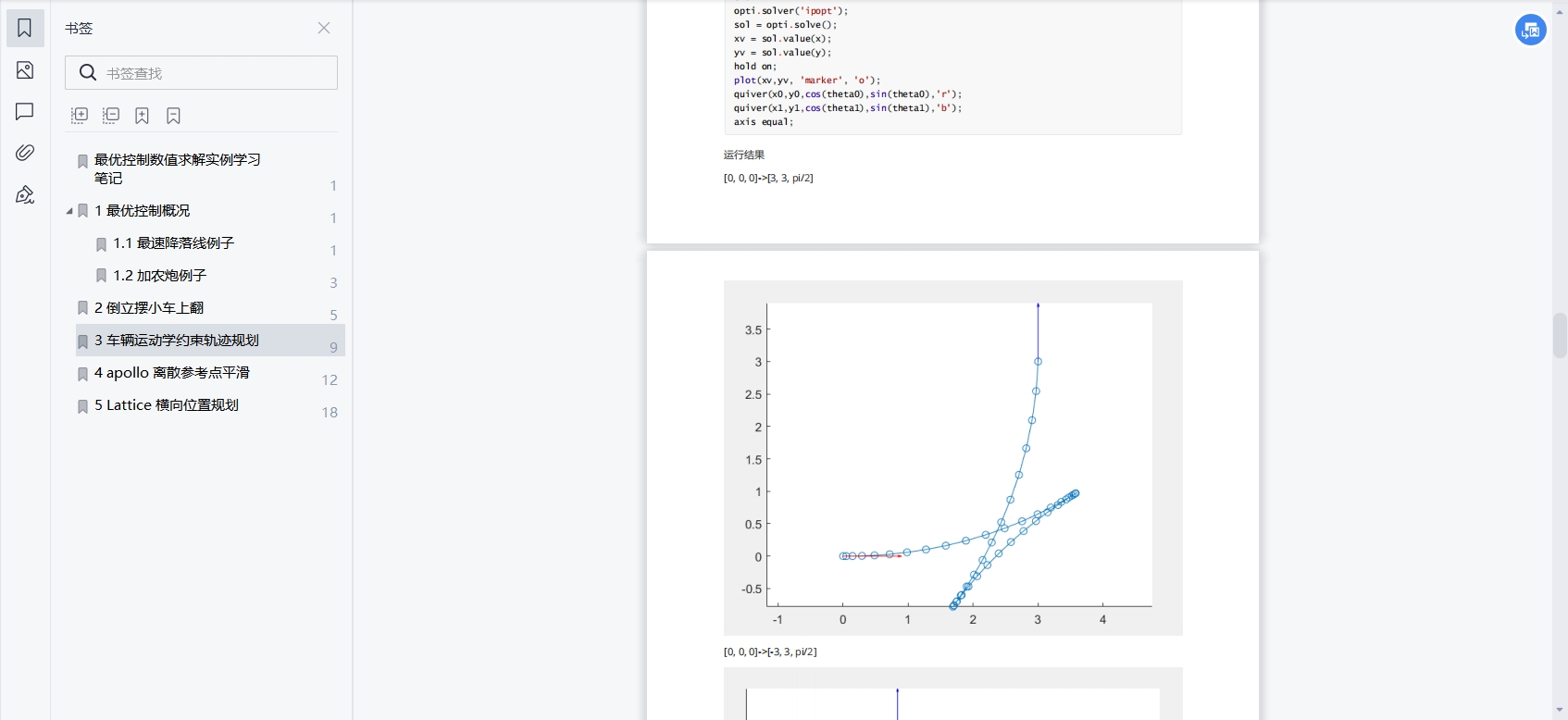
满足车辆运动学约束的路径规划
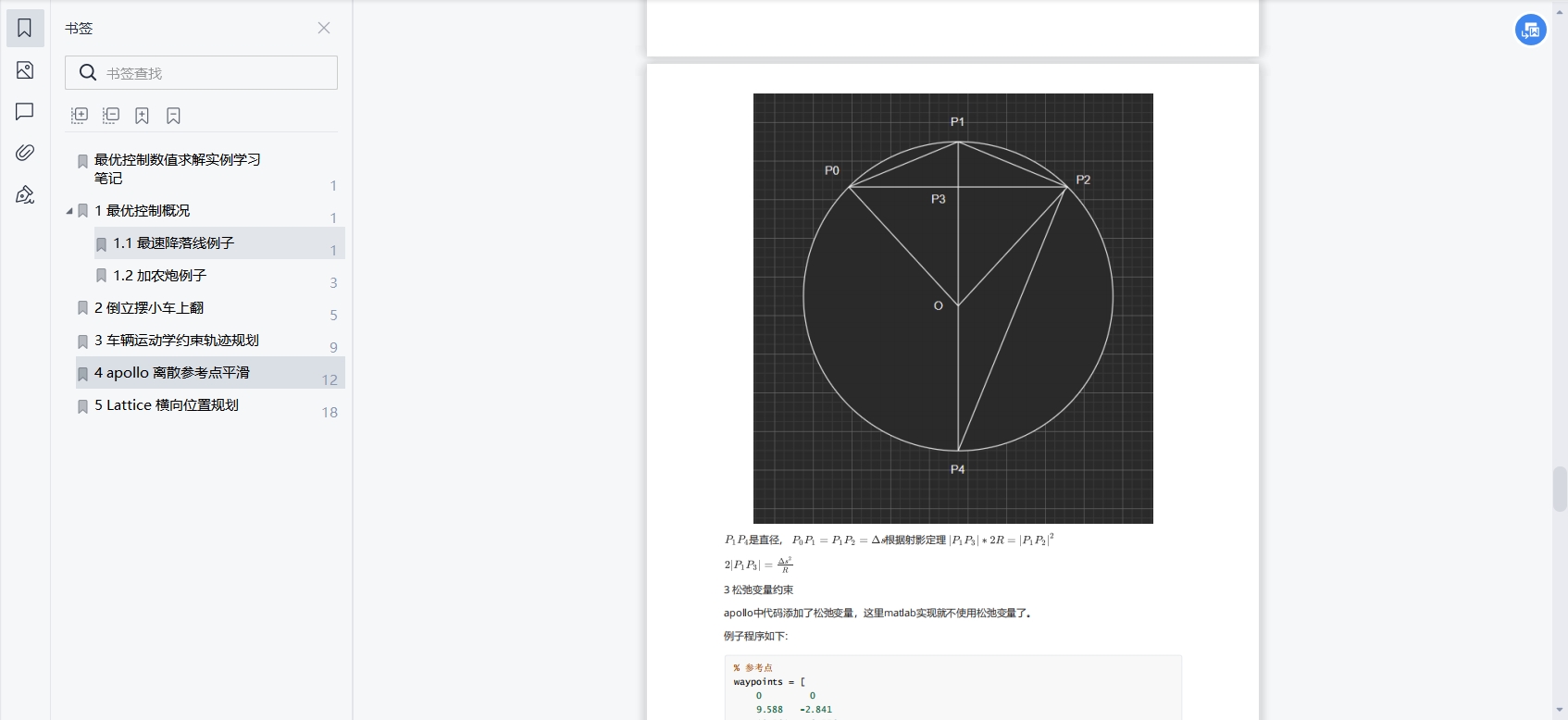
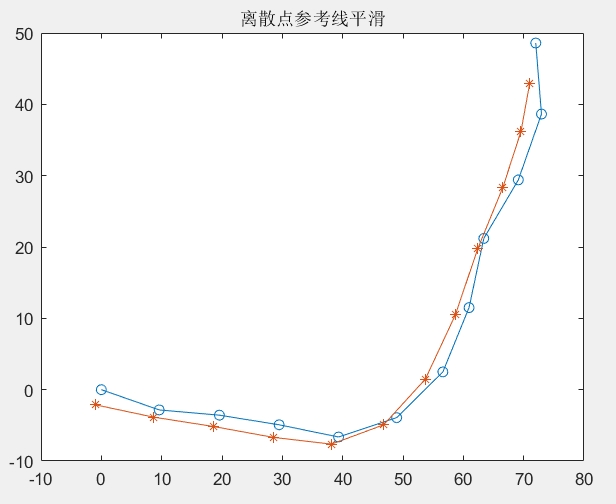
离散点参考线优化
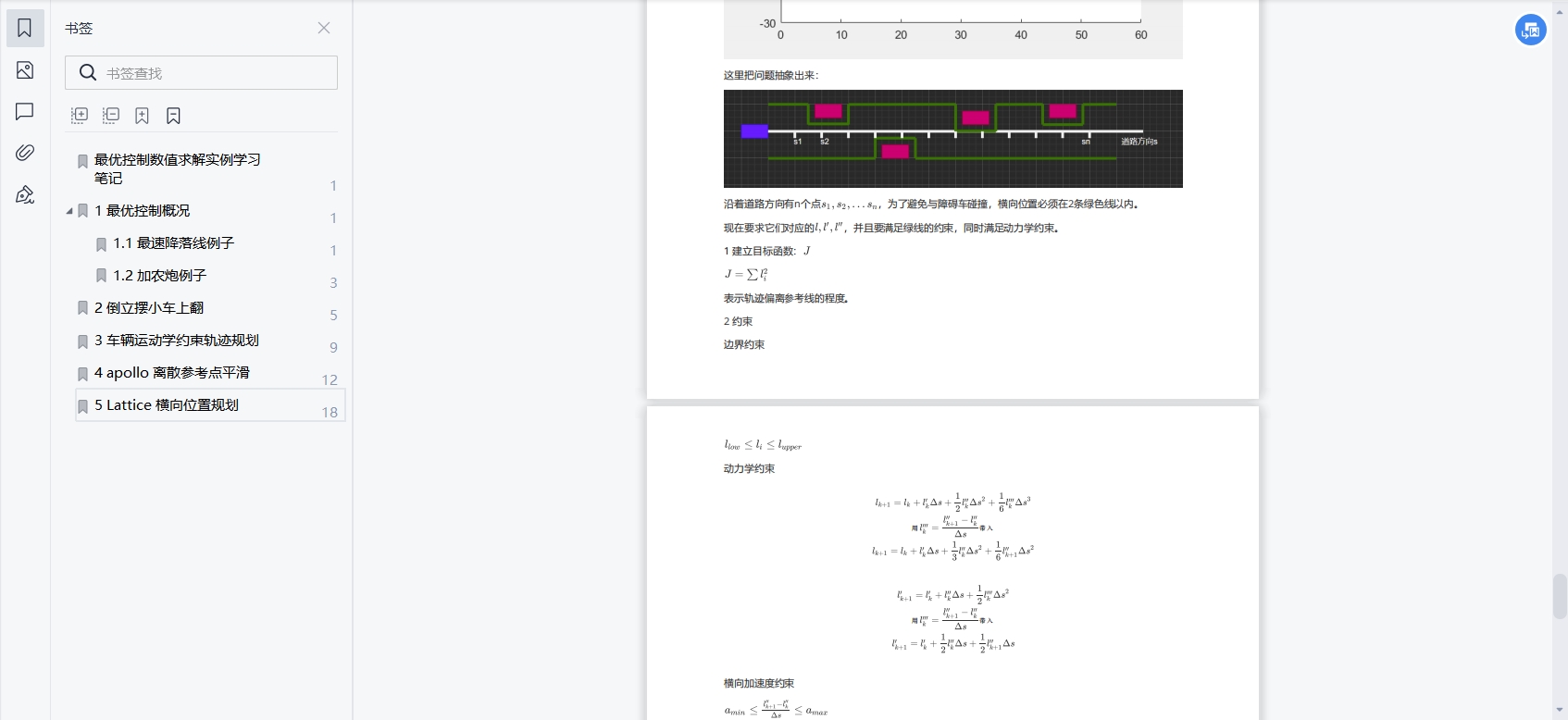
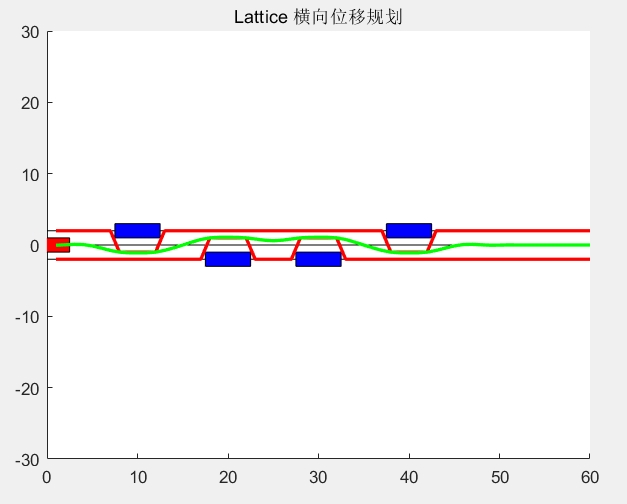
lattice横向距离规划
这段代码包含了三个程序,我们将分别对它们进行详细的分析。
1. 最速降线问题求解
这个程序的主要功能是通过优化算法求解最速降线问题。它应用于物理学、工程学和数学等领域,用于确定两个给定点之间的最速下降路径。
程序的主要思路是通过将路径分成多个小段,然后通过优化算法找到每个小段的最佳下降路径。程序首先定义起点和终点的坐标,然后根据给定的分段数目将路径分成多个小段。接下来,它使用fminunc函数和CostTime函数来进行优化,找到最佳的路径。最后,程序使用plot函数绘制出找到的路径和解析解的路径。
CostTime函数是目标函数,它计算路径的总时间。它通过计算每个小段的长度和速度来计算总时间。程序中的for循环用于计算每个小段的长度,并将其加到总时间中。
2. 车辆路径规划
这个程序的主要功能是进行车辆路径规划,以避开给定的障碍物。它应用于自动驾驶、机器人导航和交通控制等领域,用于确定车辆的最佳路径,以避开障碍物并到达目标位置。
程序的主要思路是使用优化算法来找到车辆的最佳路径。程序首先定义车辆的初始位置和障碍物的位置和尺寸。然后,它使用循环来计算横向偏移边界,以确保车辆不会碰到障碍物。接下来,程序使用casadi库来进行优化,定义决策变量和目标函数,并添加约束条件。最后,程序使用plot函数绘制出找到的路径和障碍物。
3. 参考点路径规划
这个程序的主要功能是进行参考点路径规划,以使车辆按照给定的参考点行驶。它应用于自动驾驶、机器人导航和路径规划等领域,用于确定车辆的最佳路径,以便它按照给定的参考点行驶。
程序的主要思路是使用优化算法来找到车辆的最佳路径。程序首先定义参考点的坐标和车辆的初始状态和终点状态。然后,它使用casadi库来进行优化,定义决策变量和目标函数,并添加约束条件。最后,程序使用plot函数绘制出找到的路径和参考点。
以上是对给定代码的详细分析和解释。这些程序涉及到的知识点包括优化算法、数值计算、路径规划和绘图等。希望这些解释对你有帮助
YID:5745658004330616
autorobot
最优控制和轨迹规划学习笔记
在控制系统中,最优控制和轨迹规划是非常重要的研究领域。它们应用于各种领域,如机器人导航、自动驾驶和交通控制。在本篇文章中,我们将介绍最优控制和轨迹规划的基本概念,并通过分析三个具体的程序来加深理解。
首先,我们将介绍第一个程序,最速降线问题求解。这个程序的目标是通过优化算法求解两个给定点之间的最速下降路径。在物理学、工程学和数学等领域中,最速降线问题经常用于确定质点或物体在重力作用下的最佳路径。为了实现这个目标,程序将路径分成多个小段,并通过优化算法找到每个小段的最佳下降路径。具体来说,程序首先定义起点和终点的坐标,并将路径分割成多个小段。然后,它使用fminunc函数和CostTime函数来进行优化,找到每个小段的最佳路径。最后,程序使用plot函数将找到的路径和解析解的路径进行绘制,从而实现对最速降线问题的求解。
下面,我们将介绍第二个程序,即车辆路径规划。这个程序的目标是确定车辆的最佳路径,以避开给定的障碍物。在自动驾驶、机器人导航和交通控制等领域中,车辆路径规划被广泛应用于确定车辆的最佳路径,以避开障碍物并达到目标位置。为了实现这个目标,程序首先定义了车辆的初始位置和障碍物的位置和尺寸。然后,它使用循环来计算横向偏移边界,以确保车辆不会碰到障碍物。接下来,程序使用casadi库进行优化,定义决策变量和目标函数,并添加约束条件。最后,程序使用plot函数将找到的路径和障碍物进行绘制,从而实现对车辆路径规划的求解。
最后,我们将介绍第三个程序,即参考点路径规划。这个程序的目标是使车辆按照给定的参考点行驶。在自动驾驶、机器人导航和路径规划等领域中,参考点路径规划被广泛应用于确定车辆的最佳路径,以便它按照给定的参考点行驶。为了实现这个目标,程序首先定义参考点的坐标以及车辆的初始状态和终点状态。然后,它使用casadi库进行优化,定义决策变量和目标函数,并添加约束条件。最后,程序使用plot函数将找到的路径和参考点进行绘制,从而实现对参考点路径规划的求解。
通过以上的分析,我们对最优控制和轨迹规划有了更加深入的理解。这些程序涉及到的知识点包括优化算法、数值计算、路径规划和绘图等。希望这些解释对你有帮助,同时也希望它们能够激发你的兴趣,进一步深入研究最优控制和轨迹规划的领域。
以上相关代码,程序地址:http://wekup.cn/658004330616.html















 4580
4580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









