






行驶车辆状态估计,无迹卡尔曼滤波,扩展卡尔曼滤波(EKF UKF)
软件使用:Matlab Simulink
适用场景:采用扩展卡尔曼滤波和无迹卡尔曼滤波EKF UKF进行行驶车辆的“车速,质心侧偏角,横摆角速度估计”,可实现多种工况下车辆状态估计。
产品simulink源码包含如下模块:
→工况: 阶跃工况
→整车模块:7自由度整车模型
→估计模块:无迹卡尔曼滤波,扩展卡尔曼滤波
→模型状况:
模型输入:方向盘转角delta,车辆纵向加速度ax
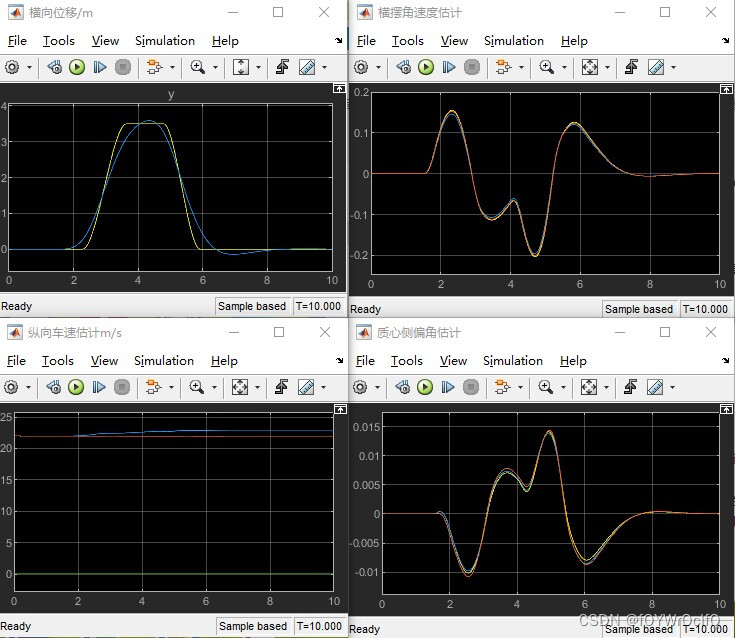
模型输出:横摆角速度wz,纵向车速vx,质心侧偏角β?
包含:simulink源码文件,详细建模说明文档,对应参考资料,售后提供关于产品任何问题,代码均为自己开发,感谢您的支持。
适用于需要或想学习整车动力学simulink建模,以及simulink状态估计算法建模的朋友。
模型运行完全OK(仅适用于MATLAB17版本及以上),

行驶车辆状态估计是汽车领域中的一个重要研究方向。为了实现对车辆行驶状态的准确估计,无迹卡尔曼滤波和扩展卡尔曼滤波(EKF UKF)被广泛采用。本文将围绕这两种滤波算法展开,介绍它们在行驶车辆状态估计中的应用。
在行驶车辆状态估计中,无迹卡尔曼滤波和扩展卡尔曼滤波是两种常用的滤波算法。无迹卡尔曼滤波是对标准卡尔曼滤波的改进,通过引入无迹变换来解决非线性系统的问题。扩展卡尔曼滤波则是对非线性系统进行线性化处理,进而利用卡尔曼滤波算法进行状态估计。
本文中,我们采用Matlab Simulink作为软件工具,来实现行驶车辆状态估计。我们提供了相应的simulink源码包,其中包含了阶跃工况和7自由度整车模型等模块。在估计模块中,我们通过无迹卡尔曼滤波和扩展卡尔曼滤波来对行驶车辆的车速、质心侧偏角和横摆角速度进行估计。这样的设计可以适应多种工况下的车辆状态估计需求。
具体来说,我们的模型输入包括方向盘转角delta和车辆纵向加速度ax,而模型输出则包括横摆角速度wz、纵向车速vx和质心侧偏角β。通过对这些输入和输出进行建模和状态估计,我们可以获取准确的行驶车辆状态。
我们的simulink源码文件中还包含了详细的建模说明文档和对应的参考资料。如果您在使用过程中遇到任何问题,我们将提供售后支持。同时,我们的代码是由我们团队开发的,保证了质量和稳定性。
这个模型适用于那些希望学习整车动力学simulink建模和状态估计算法建模的朋友。运行这个模型的前提是您的MATLAB版本要高于17。
总之,本文围绕行驶车辆状态估计展开,介绍了无迹卡尔曼滤波和扩展卡尔曼滤波在该领域中的应用。我们通过Matlab Simulink提供了相应的源码和详细说明文档,以帮助读者深入理解和应用这两种滤波算法。希望本文能够为对行驶车辆状态估计感兴趣的读者提供有益的信息和指导。如果您有任何问题或建议,请随时与我们联系。谢谢!
相关代码,程序地址:http://lanzouw.top/643944832006.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









