







 超级会员免费看
超级会员免费看
 本文介绍了UWB AoA(角度-of-Arrival)设计中的关键因素,包括两个接收天线之间的相位差对系统精度和分辨率的影响。建议的天线元件间距为0.45λ,以避免相位测量误差和PDoA包裹问题。此外,详细阐述了角度计算过程,涉及到PDoA转换为路径差的查找表方法。
本文介绍了UWB AoA(角度-of-Arrival)设计中的关键因素,包括两个接收天线之间的相位差对系统精度和分辨率的影响。建议的天线元件间距为0.45λ,以避免相位测量误差和PDoA包裹问题。此外,详细阐述了角度计算过程,涉及到PDoA转换为路径差的查找表方法。
目录
1、两个接收天线之间的相位差
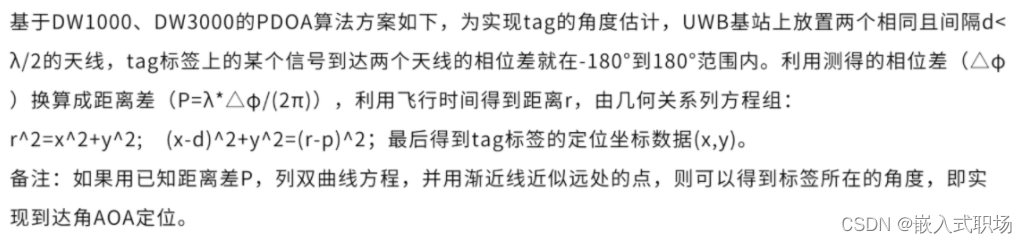
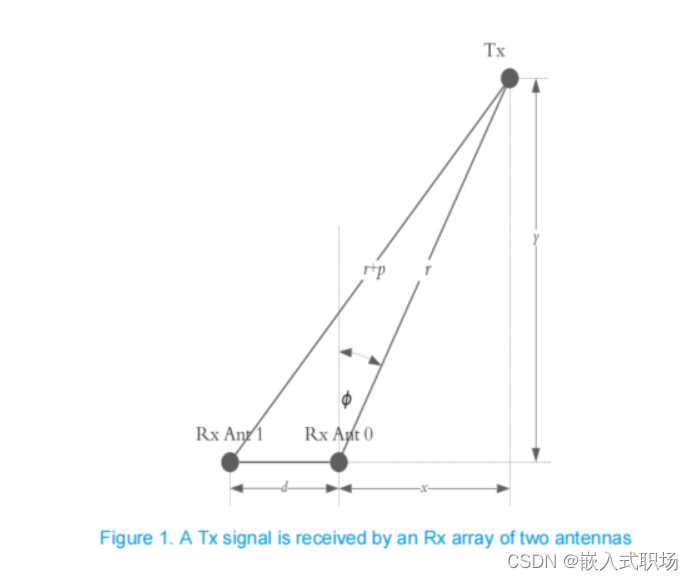
两个阵列元件之间的间距 d 是影响系统实现精度和分辨率的一个重要因素。
图 2 将 PDoA 与入射脉冲的 AoA 联系起来。
在理想情况下(- - -),天线间隔半个波长,对于-90°到+90°的入射角,PDoA的范围为-180°到+180°。如果天线间距接近0.3λ(-),则随着最大PDoA范围减少到±108°,分辨率将丢失。
如果天线以0.6λ(-)间隔更远,随着相位连续缠绕,对于小于-180°或大于+
目录
两个阵列元件之间的间距 d 是影响系统实现精度和分辨率的一个重要因素。
图 2 将 PDoA 与入射脉冲的 AoA 联系起来。
在理想情况下(- - -),天线间隔半个波长,对于-90°到+90°的入射角,PDoA的范围为-180°到+180°。如果天线间距接近0.3λ(-),则随着最大PDoA范围减少到±108°,分辨率将丢失。
如果天线以0.6λ(-)间隔更远,随着相位连续缠绕,对于小于-180°或大于+
 433
3171
433
3171

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























