




R3LIVE相关参考:
R3LIVE(升级R2LIVE):编译与运行https://blog.csdn.net/handily_1/article/details/122271243?spm=1001.2014.3001.5502
R3live:整体分析
https://blog.csdn.net/handily_1/article/details/122360134?spm=1001.2014.3001.5502
运行代码报错:Failed to load module “canberra-gtk-module“
https://blog.csdn.net/handily_1/article/details/122359275
R3live笔记:(图像处理)视觉-惯性里程计VIO部分
https://blog.csdn.net/handily_1/article/details/122377514
r3live VIO
r3live的VIO子系统绘制了全局地图的纹理,通过最小化光度误差来估计系统的状态,即:
将全局地图中一定数量的点(即跟踪的点)投影到当前图像中,
然后最小化这些点的光度误差,在ESIKF框架内迭代估计系统状态。
为了提高效率,跟踪的地图点是稀疏的,这通常需要构建输入图像的金字塔。
然而,金字塔对平移或旋转都不是不变的,也需要被估计。
r3live框架中,利用单个地图点的颜色来计算光度误差,
因为颜色是地图点的固有属性,对相机的平移和旋转都是不变的。
根据r3live框图的VIO部分:
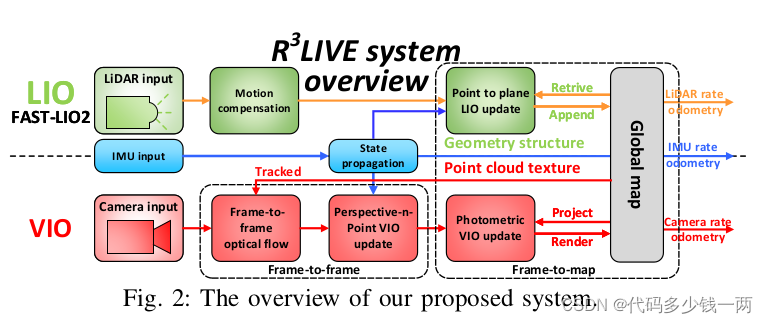
首先利用一个帧对帧(frame-to-frame)的光流来跟踪地图点,
通过最小化跟踪地图点的Perspective-n-Point(PnP)投影误差,
然后,通过最小化跟踪点之间的帧到地图(frame-to-map的光度误差来进一步细化系统的状态估计,
有了收敛的状态估计和原始输入图像,执行纹理渲染来更新全局地图中点的颜色。
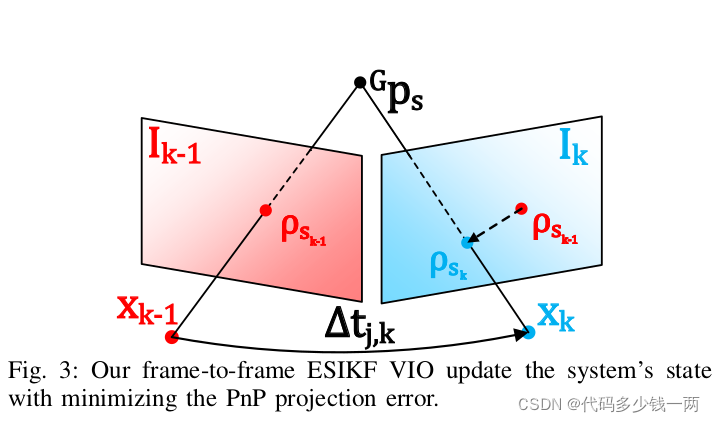
1. 帧对帧(frame-to-frame)
假设在最后一个图像帧中Ik-1跟踪到了 m个地图点 ,它们在 Ik-1上的投影为 [公式] ,利用Lucas-Kanade光流来找出它们在当前图像帧 Ik中的位置,标记为 。然后,通过ESIKF滤波器,我们计算和优化它们的投影误差来估计状态。
1)PnP投影误差 Perspective-n-Point projection error
投影误差计算如下:

其中:

公式(5)中,第一项是针孔相机模型的投影函数,第二项为在线时间校正因子(Online-temporal correction factor)。
误差公式(4)中的测量噪声包含两个源:
一个是像素跟踪误差

另一个是地图点位置误差

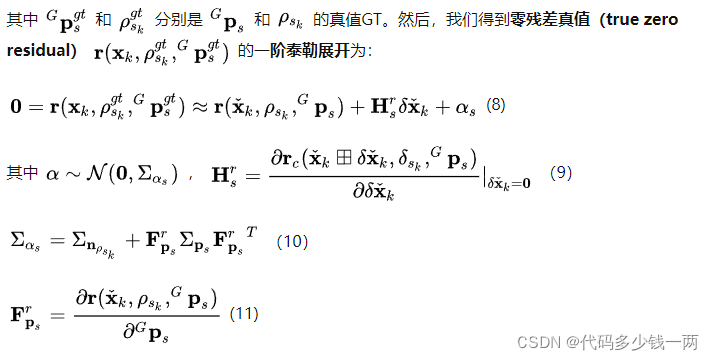
2)帧到帧视觉里程计ESIKF更新 Frame-to-frame VIO ESIKF update
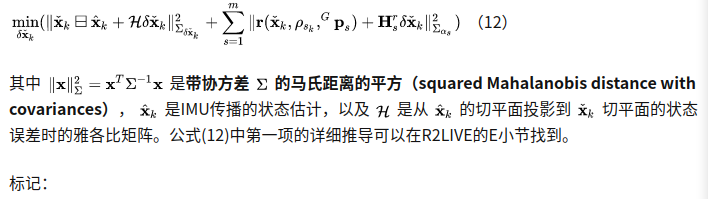
公式(8)构成了xk的观测分布,它可以与IMU传播的先验分布相结合,以得到最大后验MAP估计:
2.帧到地图 视觉惯性里程计 Frame-to-map Visual-Inertial odometry
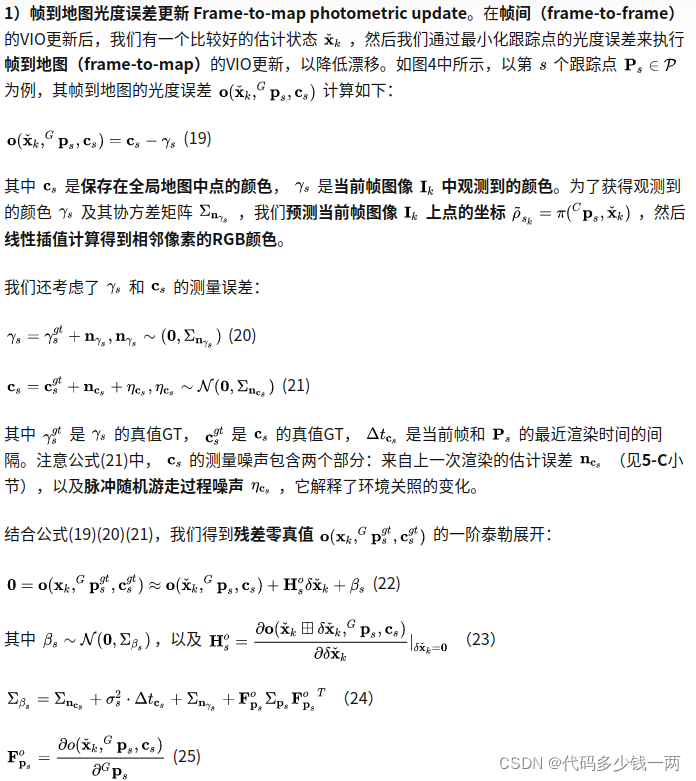
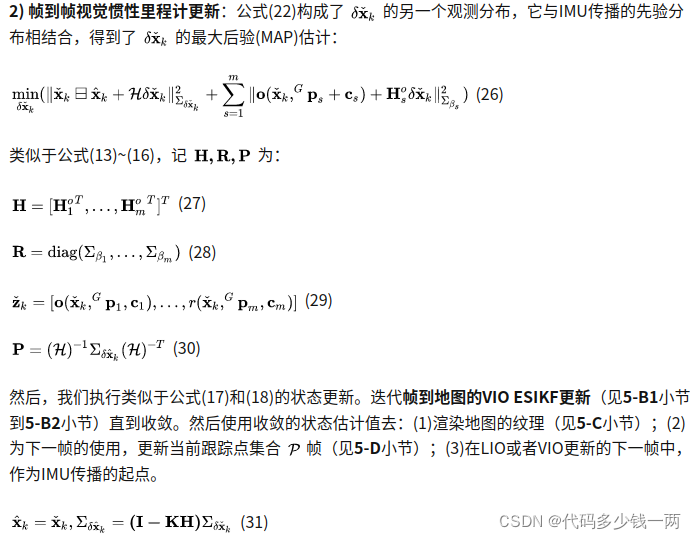
3.渲染全局地图的纹理 Render the texture of global map
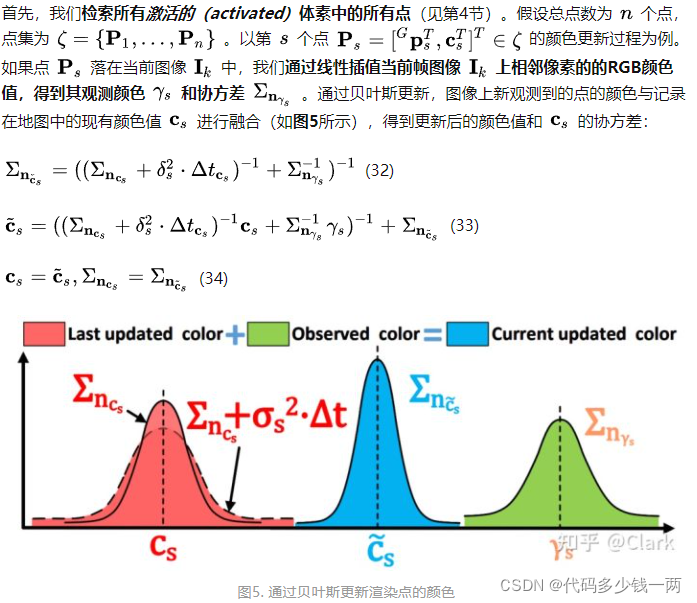
在帧到地图的VIO更新后,我们得到了当前图像的精确位姿,然后我们执行渲染功能来更新地图点的颜色。
4.视觉惯性里程计子系统的跟踪点更新 Update of the tracking points of VIO subsystem

参考:【论文阅读】R3LIVE:A Robust RealTime RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation
代码
1. IMAGE_topic
订阅:
sub_img = m_ros_node_handle.subscribe(IMAGE_topic.c_str(), 1000000, &R3LIVE::image_callback, this, ros::TransportHints().tcpNoDelay());
图像topic数据传入的时候,回调函数image_
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2267
2267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









