









介绍
空间矢量脉宽调制 (SV-PWM) 是一种调制方案,用于将给定电压矢量施加到三相电动机(永磁体或感应电机)。
目标是使用稳态直流电压并通过六个开关(例如晶体管)模拟频率和振幅可调的三相正弦波形。
这有两个挑战:
-
唯一可用的电压电平是可以假设为恒定的直流母线电压(好吧,至少为了简单起见)。
-
只有六个不同的电压角可用。没有中间立场。要旋转电机,需要一个平稳旋转的电压矢量 - 而不是每步跳过 60 度的电压矢量。
电网提供的三相电压
提供三相电压的电网将如下图所示。这就是感应电机直接连接到电网时所遇到的情况。
三相系统使用两种不同但相同的形式进行说明:
-
显示所有三相及其矢量和(空间矢量)的矢量图。
-
一个普通的瞬时正弦波表示,也显示合成空间矢量。
两电平逆变器的拓扑结构
两电平逆变器是当今最常用的拓扑结构,因为它简单且便宜。更高电平的转换器主要用于高压应用,本文不予讨论。
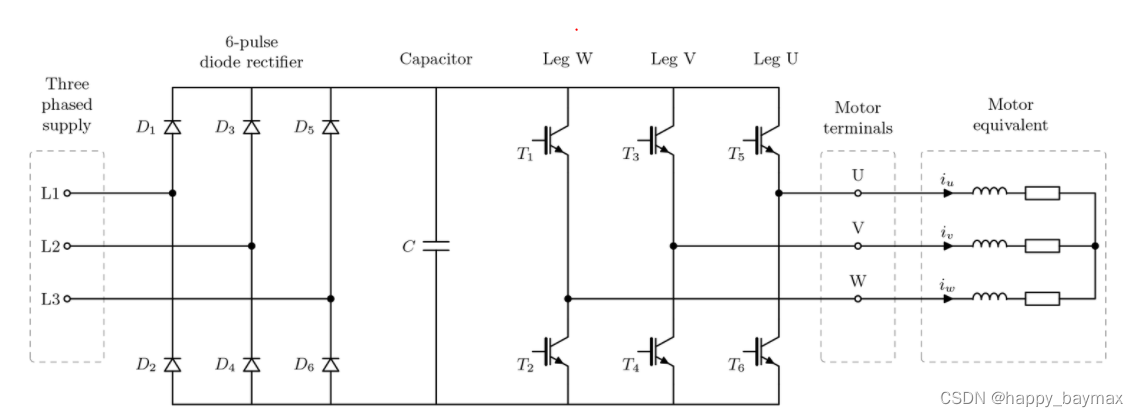
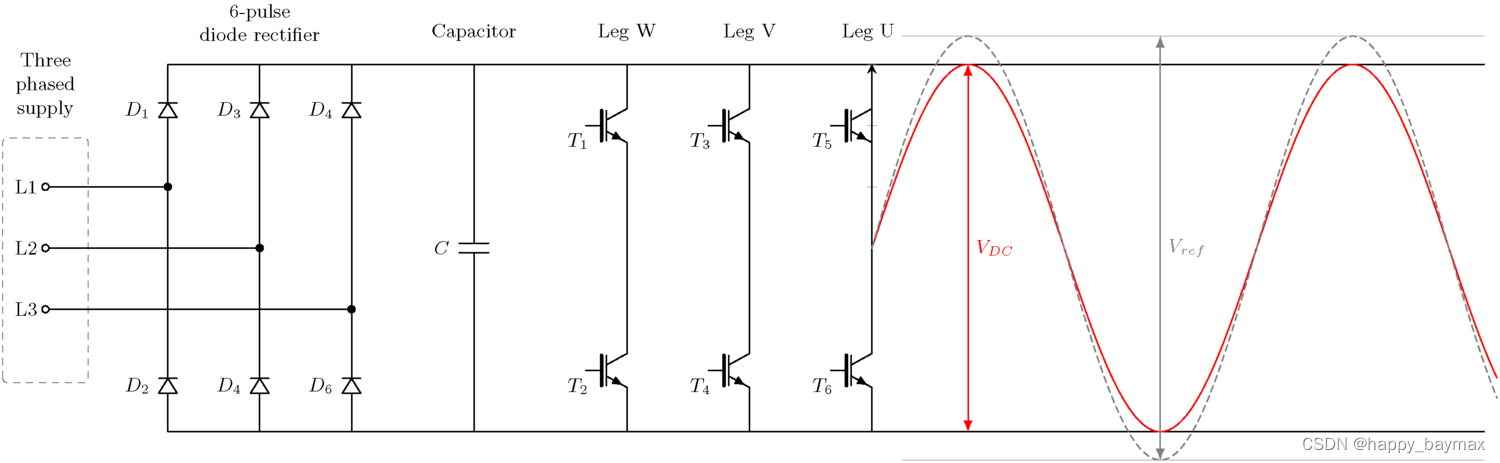
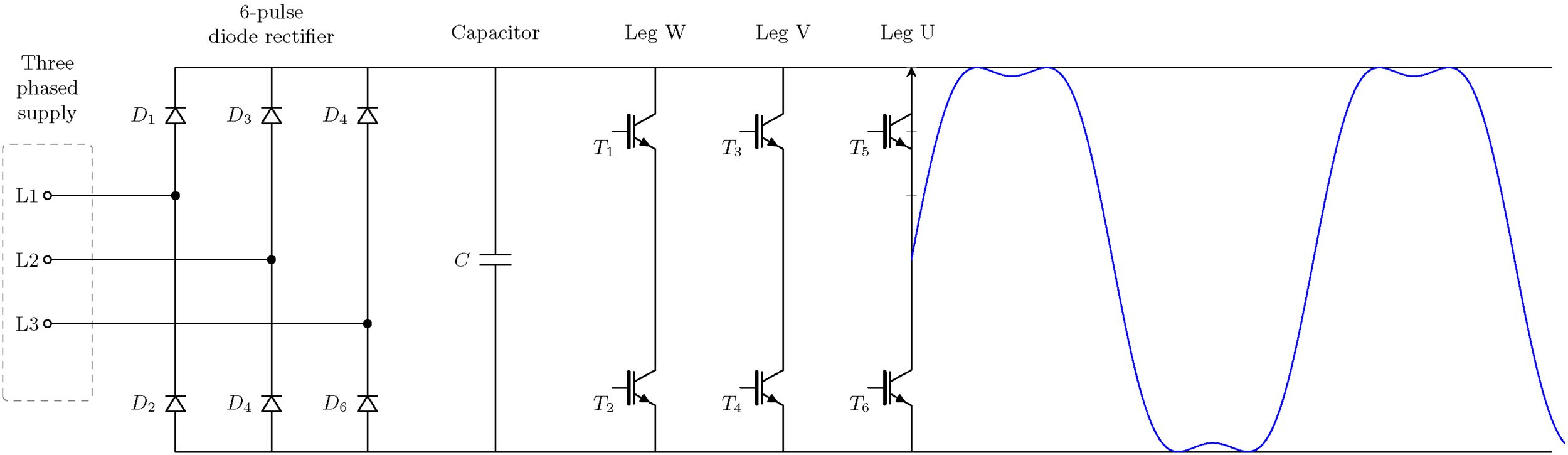
具有无源二极管前端、直流母线电容器和电机等效连接的两电平逆变器的示意图。
缓冲器和反并联二极管未显示。
上面的示意图是众所周知且使用广泛的逆变器拓扑。从左到右显示以下内容:
-
三相电源和三相二极管整流器
-
一种用于储能和稳压的直流母线电容器
-
具有六个晶体管的逆变桥
-
三个输出端子和一个星形连接(不接地)感应电机等效
-
未显示:缓冲电路、晶体管上的反并联二极管和电机中的反电动势。
为了更好地理解如何使用空间矢量 PWM,可以大大简化上面的原理图:
首先,可以简化直流母线电压使其恒定。通常它随负载变化,但在本文给出的时间范围内变化不大。因此,本文的其余部分将不会显示电源和二极管整流器。
其次,逆变桥的每个桥臂可以通过用一个单刀双掷开关代替两个桥桥桥臂晶体管来简化,该开关应指示顶部或底部晶体管关闭。一条腿上的两个晶体管都开路的情况并不有趣,也没有必要。此外,两个晶体管都关闭的情况意味着直流链路短路,我们都可以回家订购新零件。
从两个晶体管到一个 SPDT 开关的简化是可能的,因为每个桥臂中只有一个晶体管可以在任何给定时间闭合,并且每个桥臂中的一个晶体管必须闭合 才能使三相电流流动。此外,每个晶体管上始终存在反并联二极管,以允许双向电流流动。
简化示意图如下:
上面的示意图是众所周知且使用广泛的逆变器拓扑。从左到右显示以下内容:
-
三相电源和三相二极管整流器
-
一种用于储能和稳压的直流母线电容器
-
具有六个晶体管的逆变桥
-
三个输出端子和一个星形连接(不接地)感应电机等效
-
未显示:缓冲电路、晶体管上的反并联二极管和电机中的反电动势。
为了更好地理解如何使用空间矢量 PWM,可以大大简化上面的原理图:
首先,可以简化直流母线电压使其恒定。通常它随负载变化,但在本文给出的时间范围内变化不大。因此,本文的其余部分将不会显示电源和二极管整流器。
其次,逆变桥的每个桥臂可以通过用一个单刀双掷开关代替两个桥桥桥臂晶体管来简化,该开关应指示顶部或底部晶体管关闭。一条腿上的两个晶体管都开路的情况并不有趣,也没有必要。此外,两个晶体管都关闭的情况意味着直流链路短路,我们都可以回家订购新零件。
从两个晶体管到一个 SPDT 开关的简化是可能的,因为每个桥臂中只有一个晶体管可以在任何给定时间闭合,并且每个桥臂中的一个晶体管必须闭合 才能使三相电流流动。此外,每个晶体管上始终存在反并联二极管,以允许双向电流流动。
简化示意图如下:
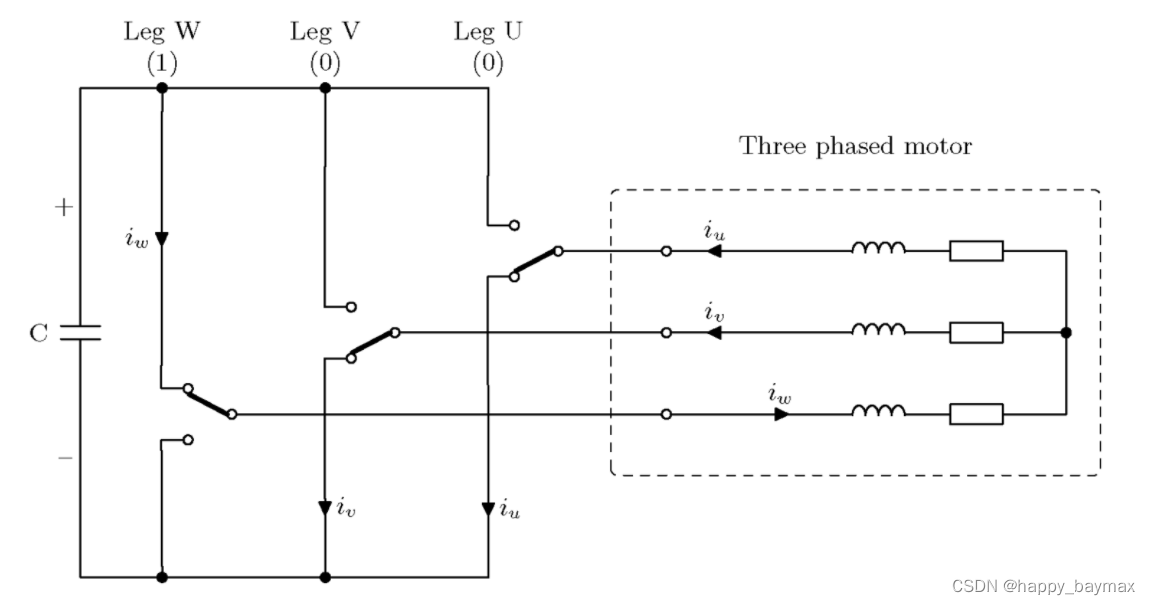
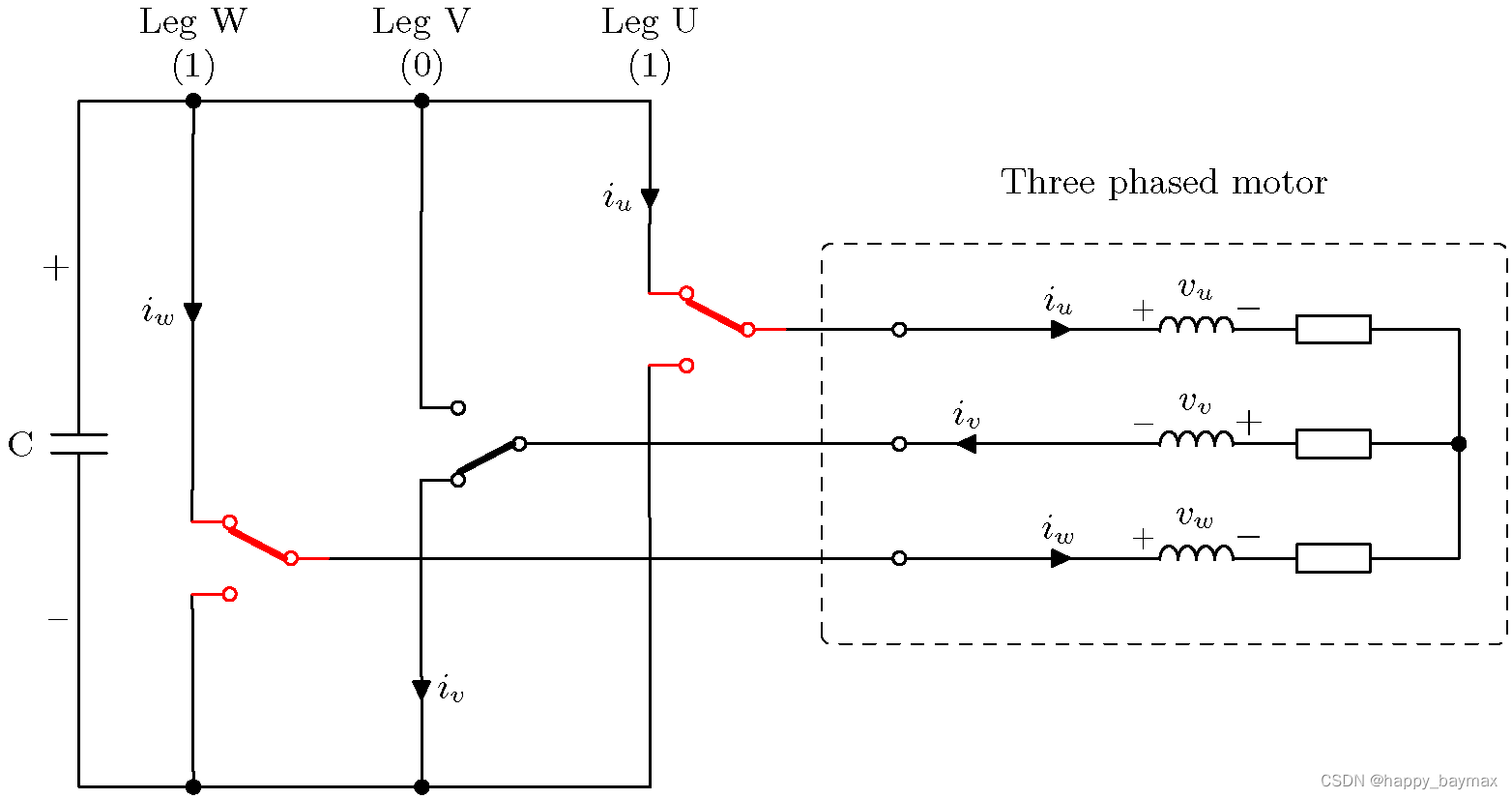
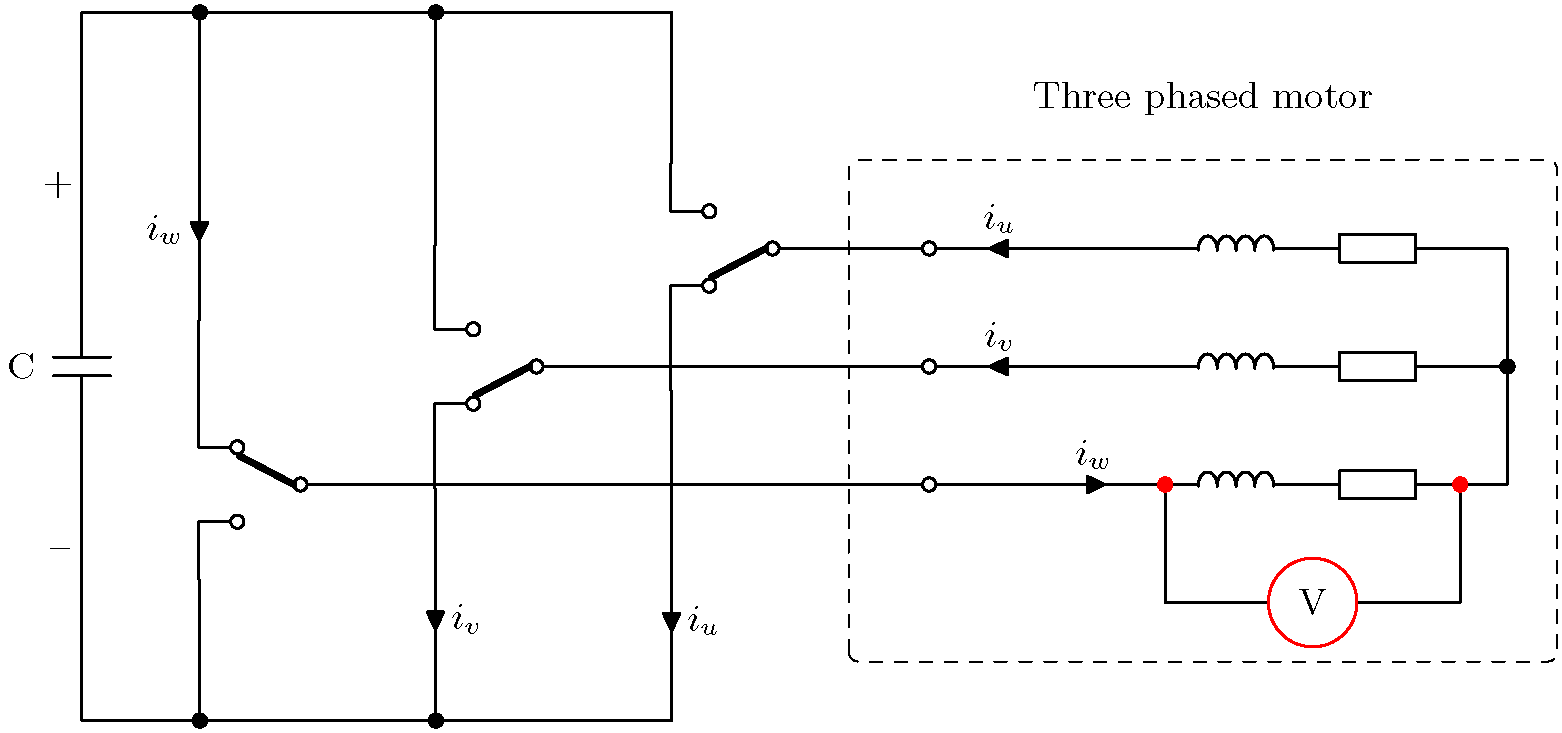
两电平逆变器的简化版本。直流链路现在假定为常数,因此二极管整流器被省略。此外,假定每个反相器支路具有在任何给定时间闭合的两个晶体管之一。在此示例中,支路 W 的上部晶体管闭合,而支路 V 和 U 的下部晶体管闭合。箭头指示当前方向。
上面的示例显示了一个晶体管组合,其中最左边的支路 (W) 的上部晶体管闭合,底部晶体管打开。另外两条腿(V 和 U)的上部晶体管打开,下部晶体管关闭。这将对应于施加到 W 相的正电压,而其他两个相为负电压。电流箭头表示从正直流链路到负直流链路的电流路径。
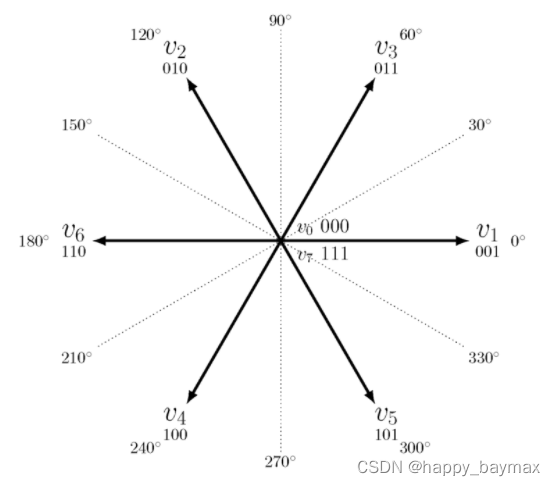
八个基本矢量及其大小和方向。零向量v0v0和v7v7显示在原点。U 相通常是所有角度的基础。角度的原点是定子内绕组的物理位置;以 120° 的间隔安装在圆周上。因为每个绕组都可以有正电压和负电压,所以它占据两个180°分离的角度。
从简化的示意图中,现在可以看出存在三个开关,每个开关可以处于两个不同的位置。因此,可能的开关配置总数是2的3次方2^3=8.
这些配置中的六个对应于施加到所连接电机的不同电压,并且 从现在起被称为基本矢量。最后两个称为零向量,因为它们表示端子上的零伏。
U 相通常构成基本矢量角度为 0° 的基础。角度的原点是定子内绕组的物理位置;以 120° 的间隔安装在圆周上。由于每个绕组都可以有正负电压,所以它占据两个相隔180°的角度,例如240°和60°分别是正负状态的W相。
在二进制中,这些向量组合可以表示为八个不同的二进制值,这里命名为v0 到v7:
000 -v0 (零矢量)
001 -v1(相 +U)
010 -v2(相 +V)
011 -v3(相-W)
100 -v4(相位+W)
101 -v5(第五期)
110 -v6(U 相)
111 -v7零向量)
三个二进制数字中的每一个都代表一个桥臂,其中值 1 表示顶部晶体管关闭,而值 0 表示底部晶体管关闭。
所有八种组合以及由此产生的电机电压和电流方向如下所示。
v0 - 000
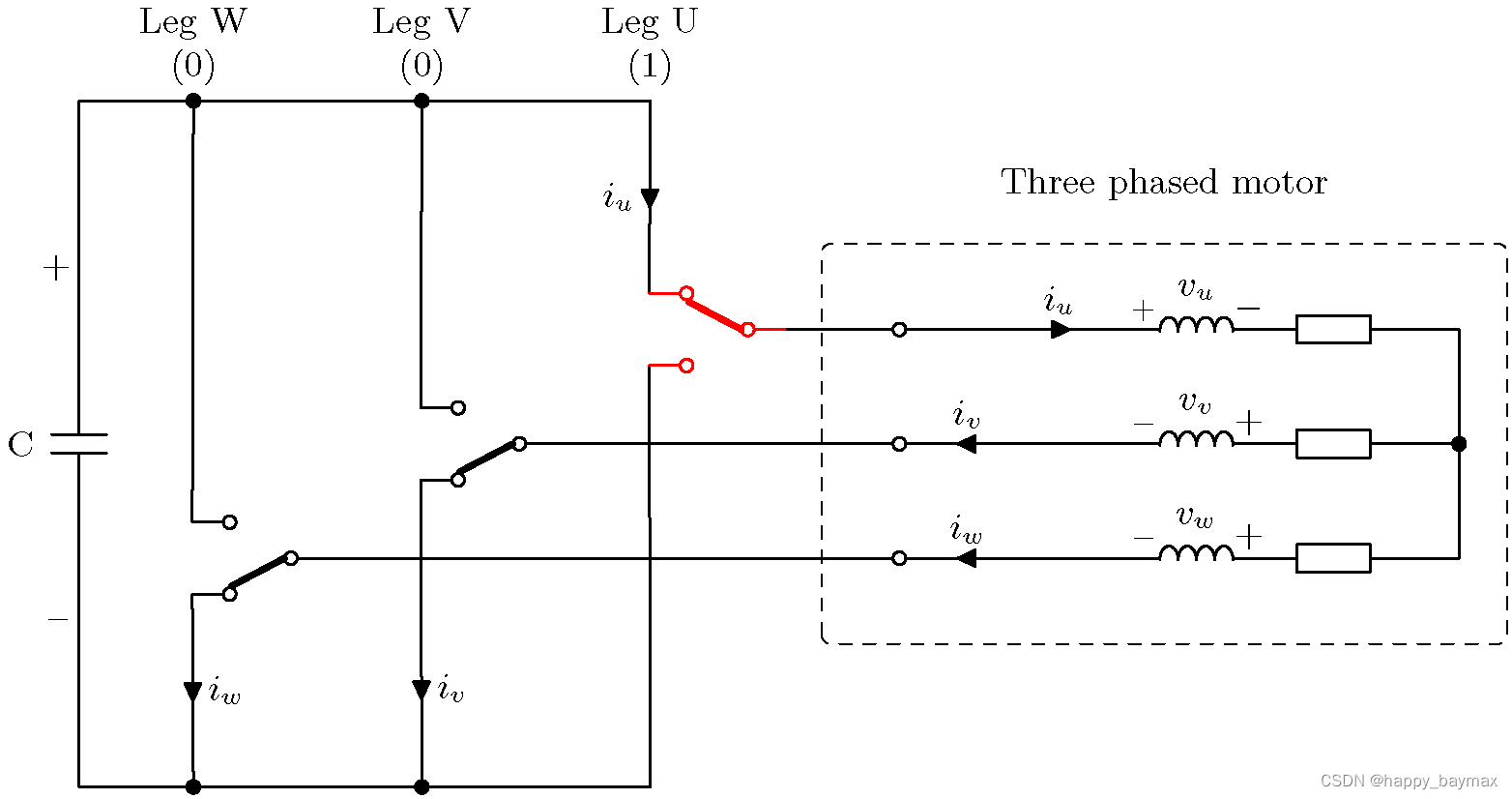 v1 - 001
v1 - 001
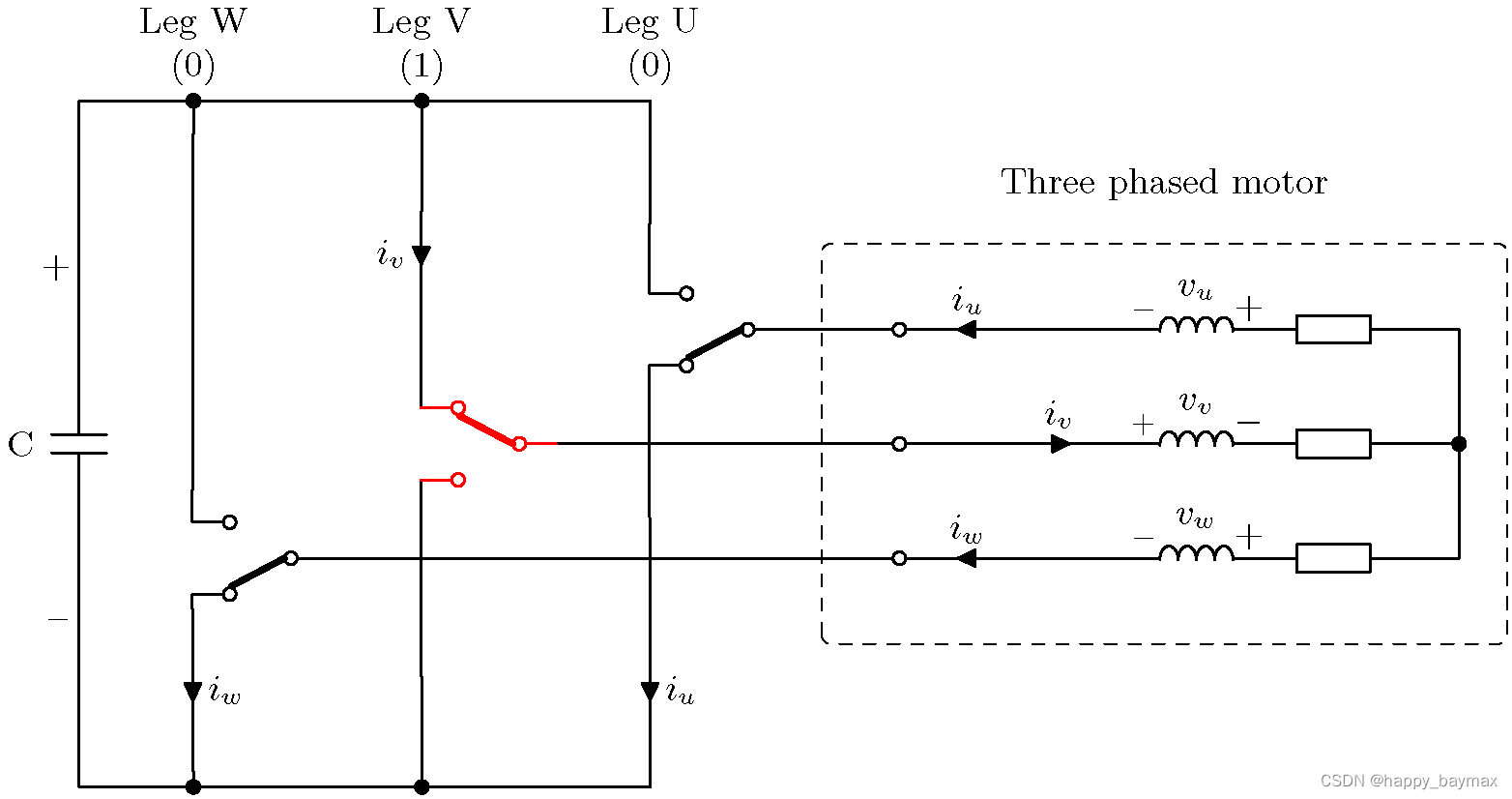 v2 - 010
v2 - 010
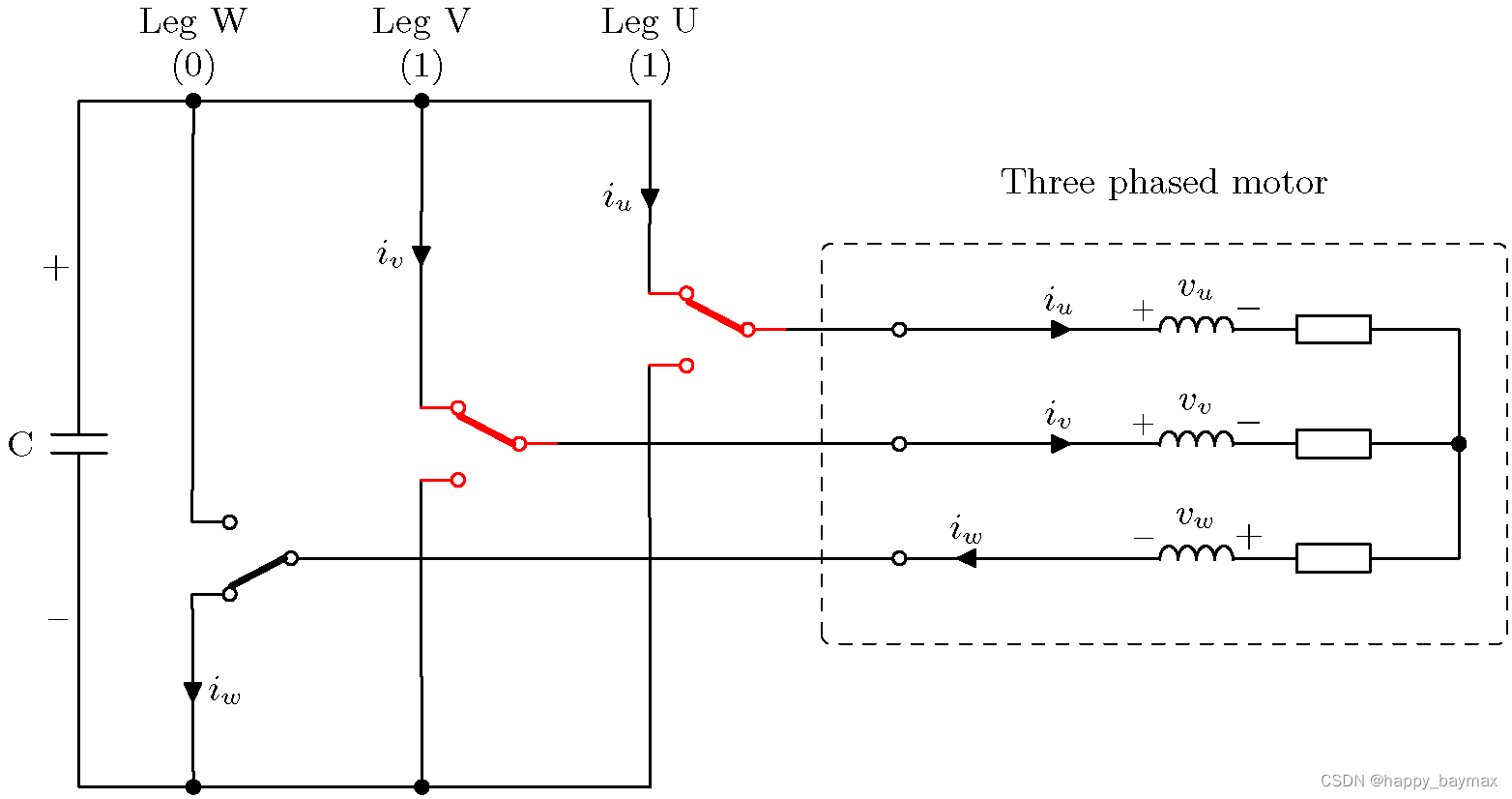 v3 - 011
v3 - 011
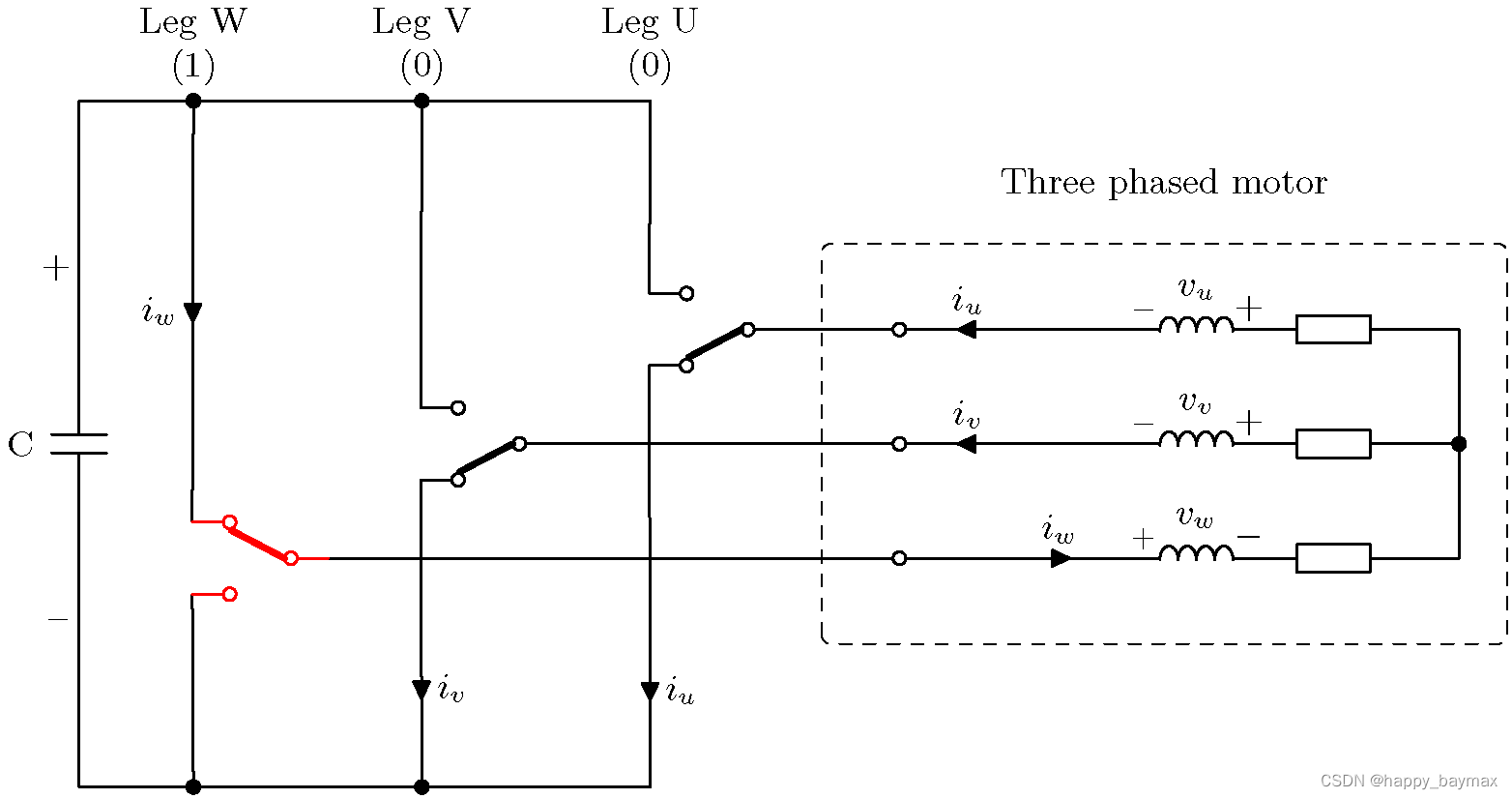 v4 -100
v4 -100
 v5 -101
v5 -101
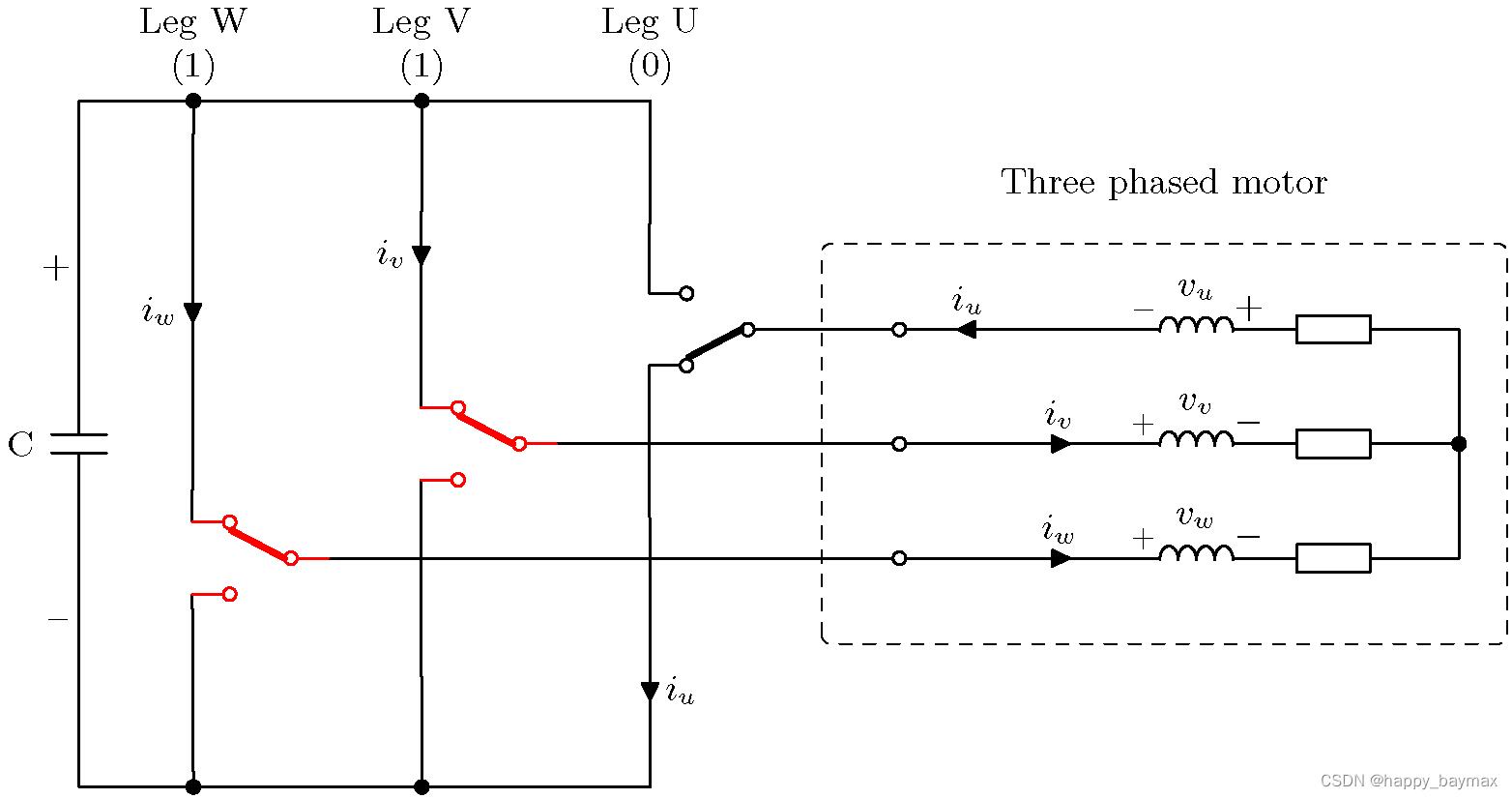 v6-110
v6-110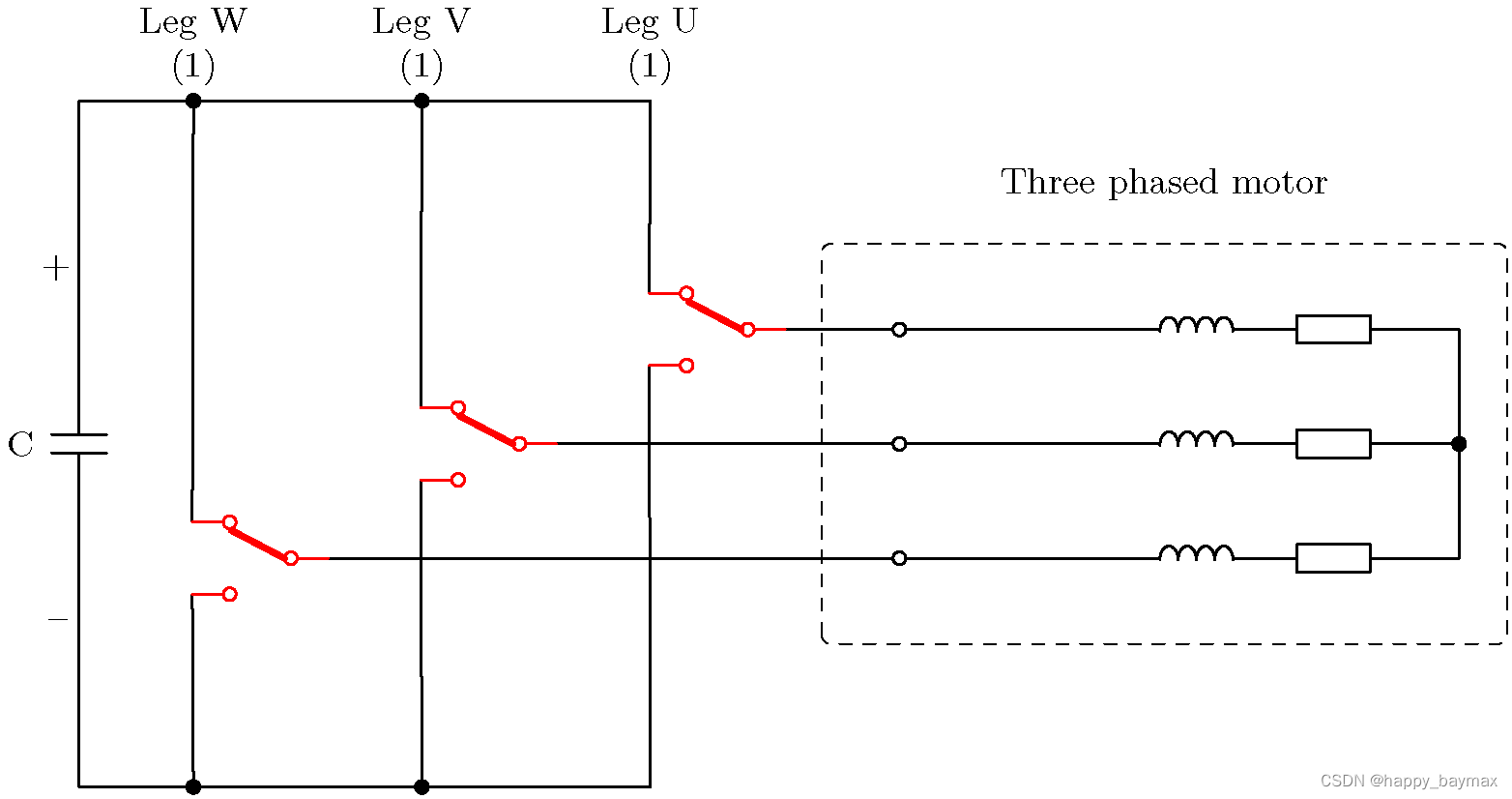
v7-111
合成输出电压
到目前为止,仅显示转换器可以向端子输出直流母线电压,以及六个可用矢量中的每一个如何影响电机中的电流和电压方向。
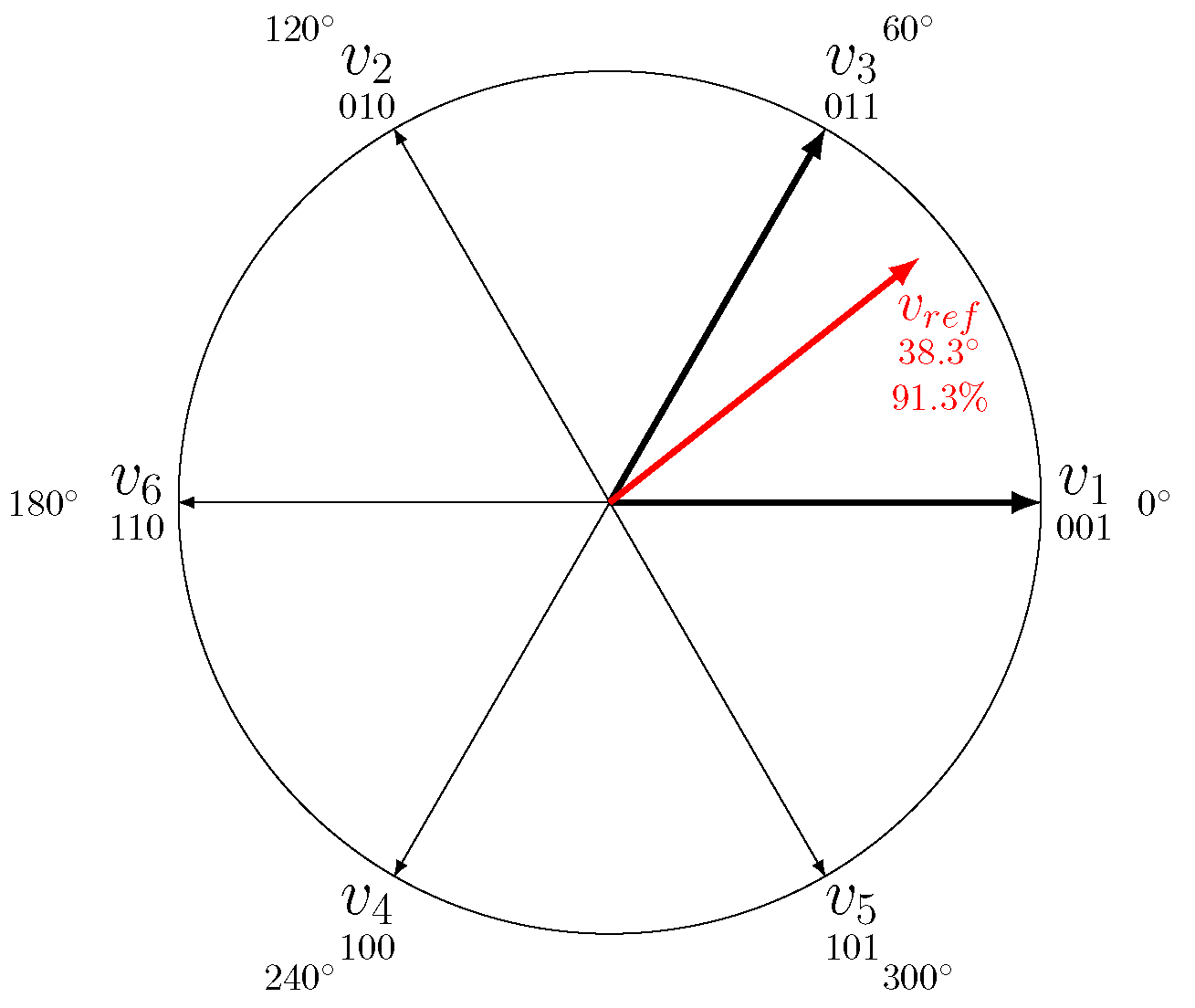
基本矢量 1 和 3 之间的电压参考。这些矢量与零矢量之间的快速交替可以模拟参考电压。
本节将展示如何通过在相邻电压矢量之间快速交替以及开启和关闭时间的定时来合成任何电压矢量。
右侧是一个参考向量的示例,逆变器必须使用可用的基本向量对其进行合成。
从图中可以看出,参考位于v1个v1和v3个v3. 该扇区称为扇区 1。现在可以在这两个基本矢量之间快速交替以仿真电压矢量38.3∘38.3∘.
两个零向量v0v0和v7v7也用于将死区时间添加到开关模式。该死区时间会降低电压幅度,并且在电压参考幅度小于 100% 时是必需的。
实际合成可以使用三角波作为触发来实现。首先是假设所需的参考电压已经可用,例如通过Vector Control for Dummies 帖子中描述的反向 Clarke/Park 变换计算得出。
下图说明了如何通过三角波将所需电压转换为三个逆变器支路中每个支路的二进制开/关信号。显示了六个不同的示例,每个示例在不同的扇区中具有不同的角度。
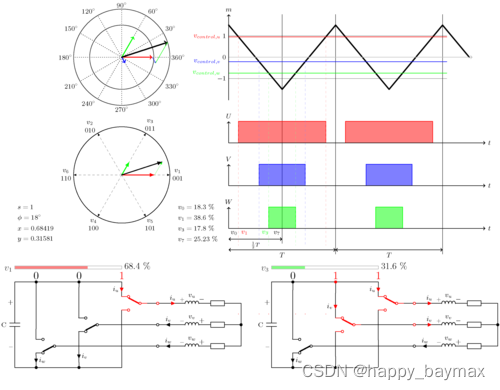
扇区 1 - 18°
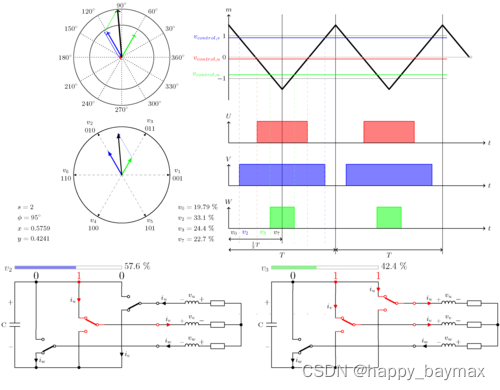
扇区 2 - 95°
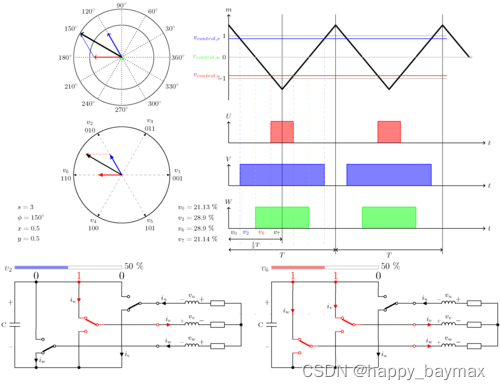
扇区 3 - 150°
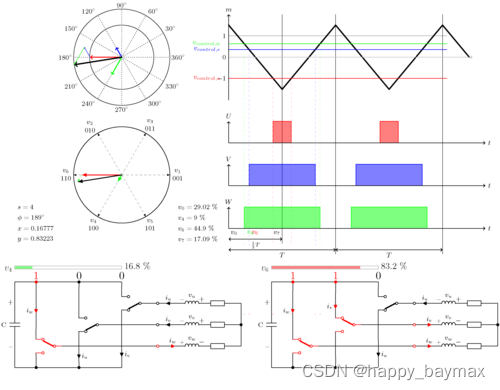
扇区 4 - 189°
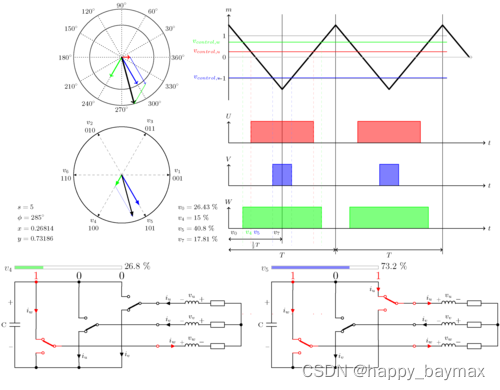
扇区 5 - 285°
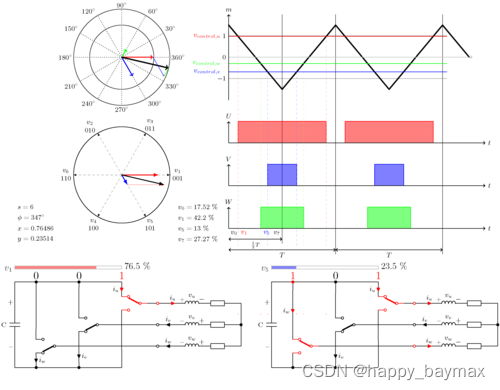
扇区 6 - 347°
概念解释
让我们在那里喘口气。这个图包含了很多信息,为了更好地解释它的不同部分,我剪下了它的四个不同区域,将在下面解释。
第 1 部分 - 三角波的输入和投影:
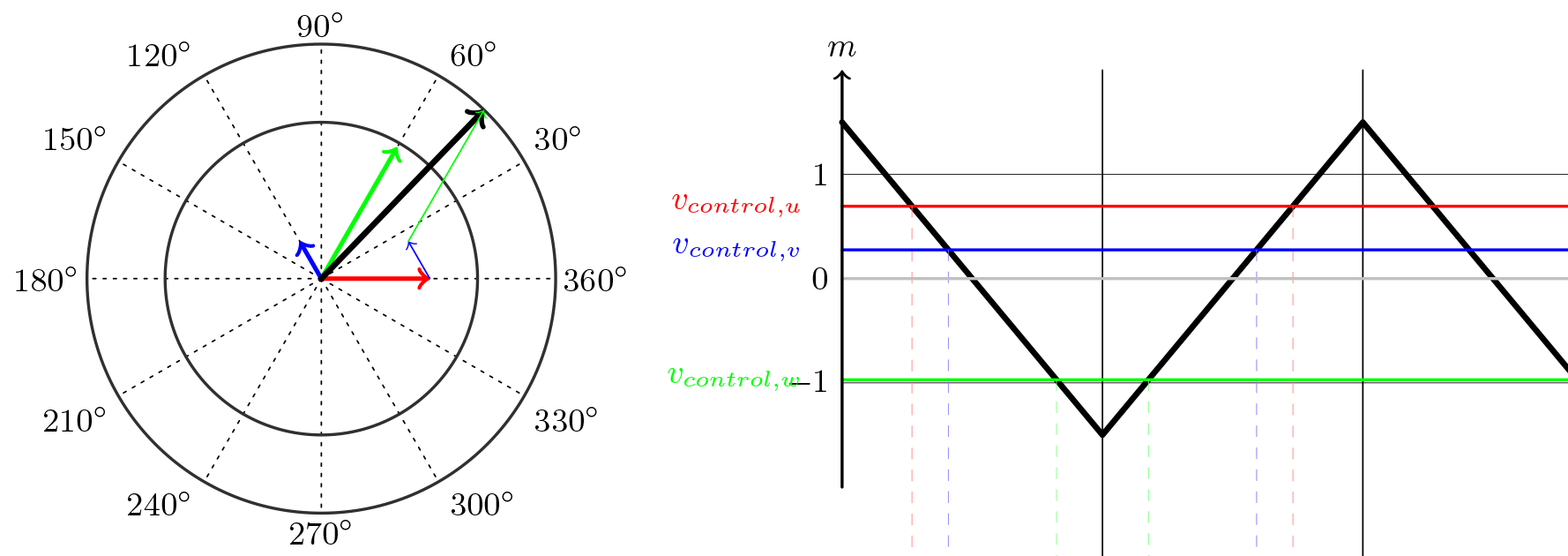
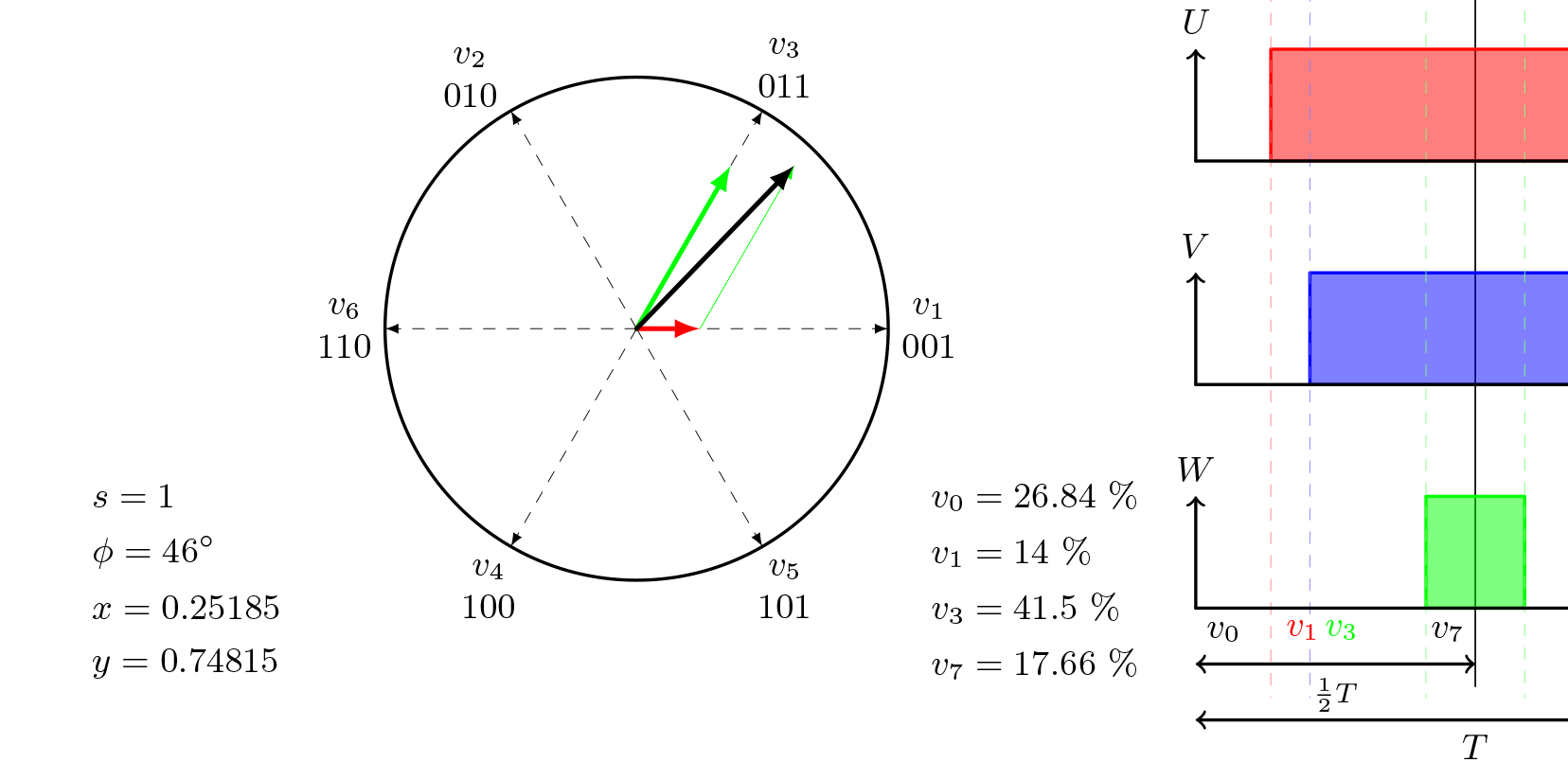
第 1 部分 - 显示所需输出电压的输入和用于确定所用矢量及其开启时间的触发波。
左边的圆圈是“输入”或“参考”。有些人也称它为命令信号。这是我们想要实现的;不同角度的三个不同电压 - 一起形成具有一个幅度和一个角度的空间矢量。
如图所示,U 相(红色)接近其最大正值。该电平也与三角波一起显示在圆圈右侧的图表上,在此处它被称为控制电压。该波形的频率比空间矢量的频率高很多倍。通常在 1 到 20 kHz 之间,但几百赫兹或高达数百千赫兹的应用并非闻所未闻。
W 相(绿色)接近其最大负值,V 相(蓝色)刚好从零向正方向延伸。
这三个值如何与三角波相交将直接转化为我们想要关闭哪些开关以及我们将它们保持关闭多长时间。
第 2 部分 - 将输入转换为开关状态:
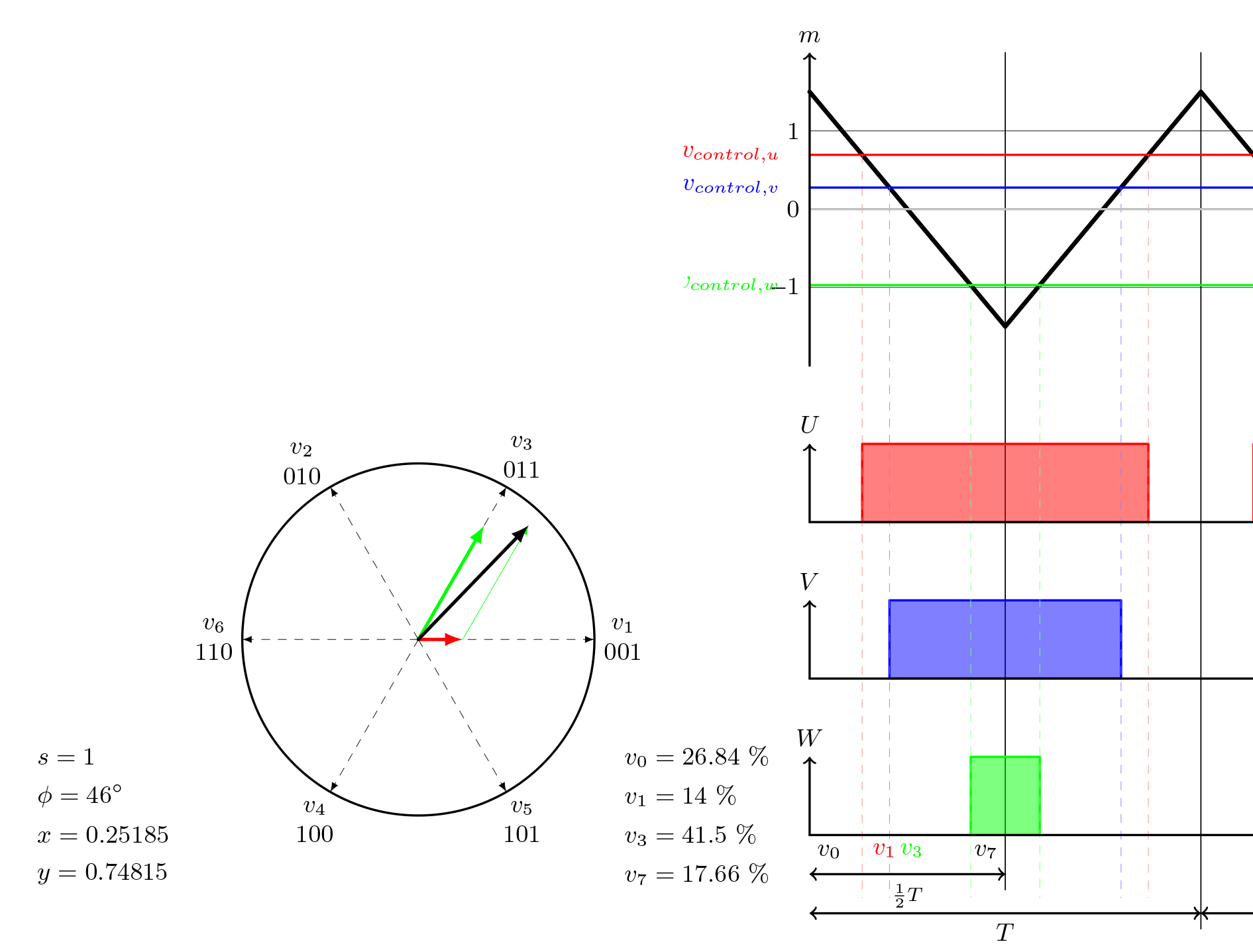
第 2 部分 - 三角波及其如何直观地转换为三个二进制数字。在这里,000-001-011-111 在 halv 期间的四个不同部分。
看图的右边部分。
这部分的主要焦点是从三角波向下突出的虚线。这些起源于控制电压与触发波相交的地方。在任何时候,都可以在 W 轴正下方看到四个不同的部分1个2个吨12T箭。对于其他空间矢量角度和大小,这四个部分的宽度会发生变化,但总宽度将始终相同。
在这个例子中的角度 (46°),第一条虚线是红色的。在三个轴的起点和红线之间,没有有源电压矢量。该区域中的所有三个控制电压都低于触发波。这意味着所有开关都关闭。000.零向量v0v0.
下一节;在红色和蓝色虚线之间。U 相控制电压现在高于触发线,而其他两个仍低于触发线。这会激活 U 型开关。001 那里。也叫v1.
第三部分:蓝线和绿线之间。现在 U 和 V 都被激活了;011 -v3.
最后一节:所有三个开关现在都处于活动状态。这是111,v7,第二个零向量。
在每个角度和大小,都会看到相同的图案;零向量 - 基本向量 - 基本向量 - 零向量。重复。唯一改变的是这些扇区的宽度(即接通时间)以及使用六个基本矢量中的哪一个。
请注意,接通时间百分比也显示在 W 轴的左侧。当所需的幅度较低时,零向量的导通时间会增加,而当幅度较高时则相反。这是由称为调制指数的比例因子控制的。如果所需的振幅高于触发波,就会发生所谓的过调制。这在后面解释。
第 3 部分 - 说明矢量
现在我们知道我们必须交替的两个向量是v1个v1和v3个v3.
通过正确获取导通时间,这将模拟与输入电压空间矢量角度相同的电压矢量。
你可以看到绿色v3-vector 在圆形矢量图和 W 轴下方的“扇形图”中都接近最大值。同样可以看出v1-接近其最小值的向量。
空间矢量圆圈内的细线绿线是视觉辅助,说明这两个基本矢量确实形成了所需的空间矢量作为矢量和。
图中左侧的值显示角度、我们所在的扇区和权重因子,Xx和是y,对于两个基本向量中的每一个。我们稍后再谈。
第 4 部分 - 两种交替开关配置的图示
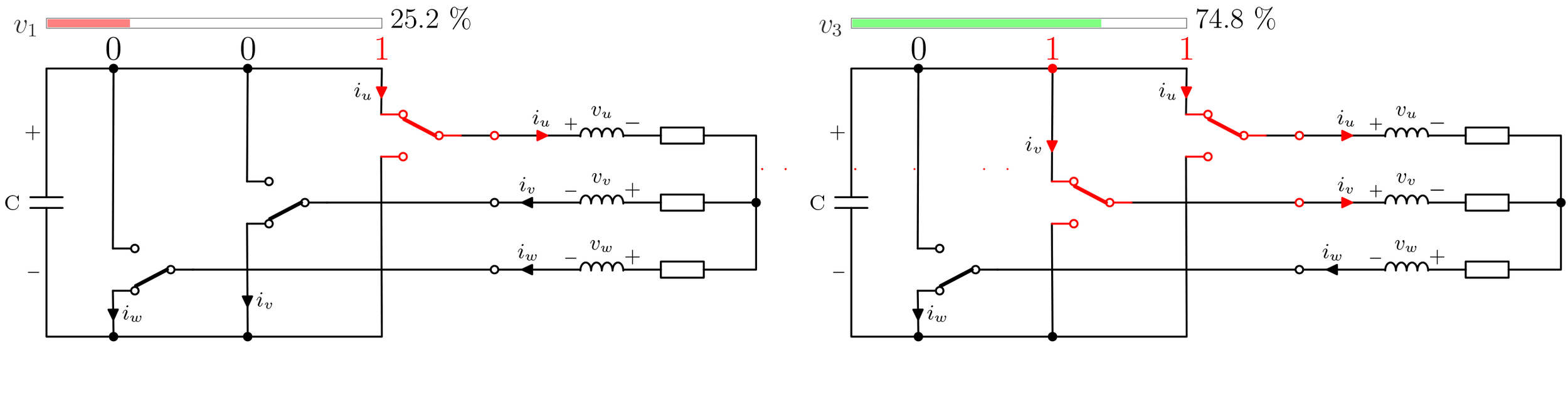
此处显示了驱动器将在其间交替的两种不同的开关组合(基本矢量)。每个配置上方的进度条指示它与两个基本向量的总开启时间相比的开启时间。即,它们相对于彼此的持续时间。
零矢量另外出现,并且会随着电压水平的降低而增加。
注意它们彼此处于相反的“相位”,就像两个相隔 90 度的正弦波一样。当左侧配置完成其循环时,右侧配置进行到一半。
这种切换方案还采用了一个漂亮的功能;当时只有一个开关正在改变状态。这减少了机器中的谐波,也减少了开关损耗,这是设计任何类型的电力电子设备时需要考虑的一个非常重要的方面。
概括
图中最重要的部分是最低轴 (W) 下方的区域。它显示了每个基本向量在每个周期内处于活动状态的部分吨T. 百分比数字显示在该轴的左侧。
还可以看出,每个模式都以零向量开始和结束,并且在每次转换之间,只有一个开关被改变。这大大减少了电机中会导致过热和扭矩波动的谐波。此外,任何对扭矩没有贡献或维持所需磁场所必需的电流都是不需要的。这是因为电力电子元件中的损耗与电流有关,它们会转化为热量,从而给冷却系统带来压力。晶体管和二极管的过热是当今设计电力电子产品时面临的主要挑战之一。另一种方法是设计一个具有更高额定电流的转换器,但这会增加价格。
此外,在上图的底部显示了两个示意图。这些表示当前部分中使用的两个基本向量的开关状态。上面的百分比指示表示它们相对于另一个的准时。例如,如果角度刚好在两个基本矢量之间(即 30°),则两个基本矢量将分别在 50% 的时间内打开。请注意,此百分比并不表示他们相对于该期间的总时间吨T. 如果电压幅值小于最大值,则添加零矢量以平均降低电压。因此,在 70% 的电压幅度和 30° 时,每个基本矢量的导通时间仍然是彼此的 50%,但在此期间总共会有 30% 的零矢量化。每个晶体管的实际导通时间因此变为 35%;
![]()
三次谐波注入
系好安全带并抽出魔杖,因为我们现在正朝着电气工程的黑暗艺术前进。
正如刚才所示,与我们真正想要的相比,我们面临着输出电压太低的挑战。但我们也面临着身体上的限制。我们要弯曲它。轻微地。
首先,让我们说明以下问题:
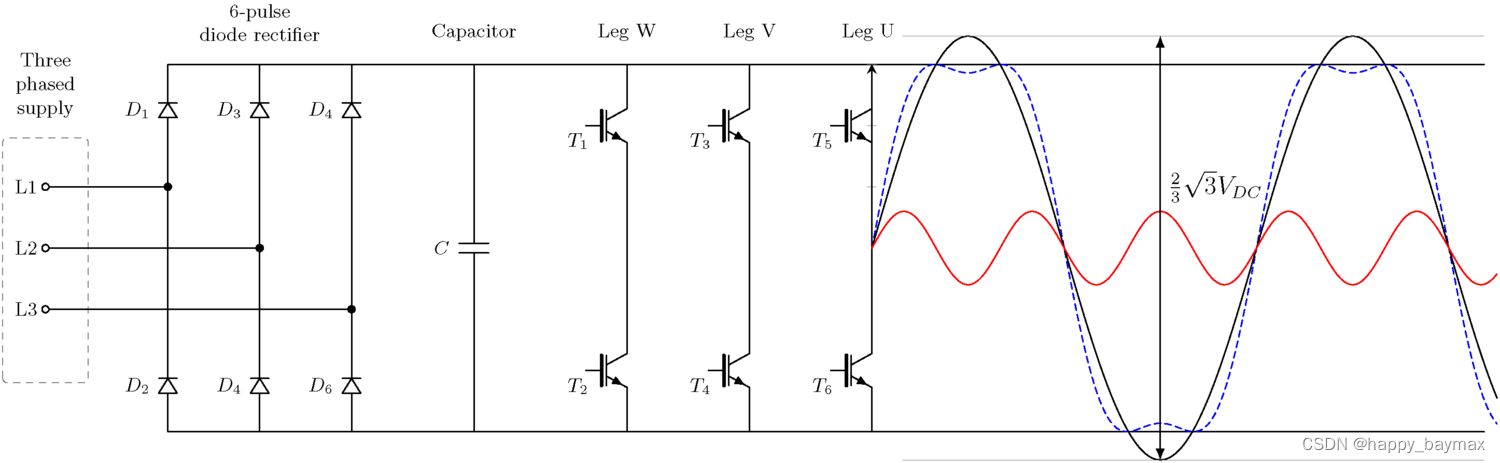
标准的两电平逆变器,其最大输出电压波形以红色显示。虚线曲线表示所需电压,即与输入均方根电压相同的幅度。
直流链路的最大电压输出必须是直流链路电压。上方显示为红色正弦波,其中峰峰值电压等于 V。RMS 相间电压变为:V直流电_= 975伏VDC=975V

这与我们刚才陈述的几段完全相同,只是从不同的角度呈现。我们仍然没有触及我们的问题,只是说明我们需要以某种方式通过直流母线上限约 15% 以达到 690 V。这似乎是不可能的;上限表示开关 100% 时间处于开启状态的开关状态,而下限表示零接通时间。那么开关怎么能大于100% 或小于0% 呢?
我们需要使用的技巧是 1980 年代一位为 GE 工作的工程师发明的,叫做(fanfare);三次谐波注入。
没错,伙计们;添加频率是基频三倍的第二个正弦波将以一种非常优雅的方式有效地解决我们的问题,如下所示:
三次谐波注入;隐藏在蓝色波形内的是振幅高于直流母线电压的基波正弦波。
等等,你说?有人为平滑的正弦波买单了吗?
好吧,诀窍是它都隐藏在里面。通过将上面的蓝色曲线扩展为其组成的正弦波(也称为傅里叶展开),将出现以下内容:
三次谐波和基频谐波暴露出来,显示出增加的振幅。
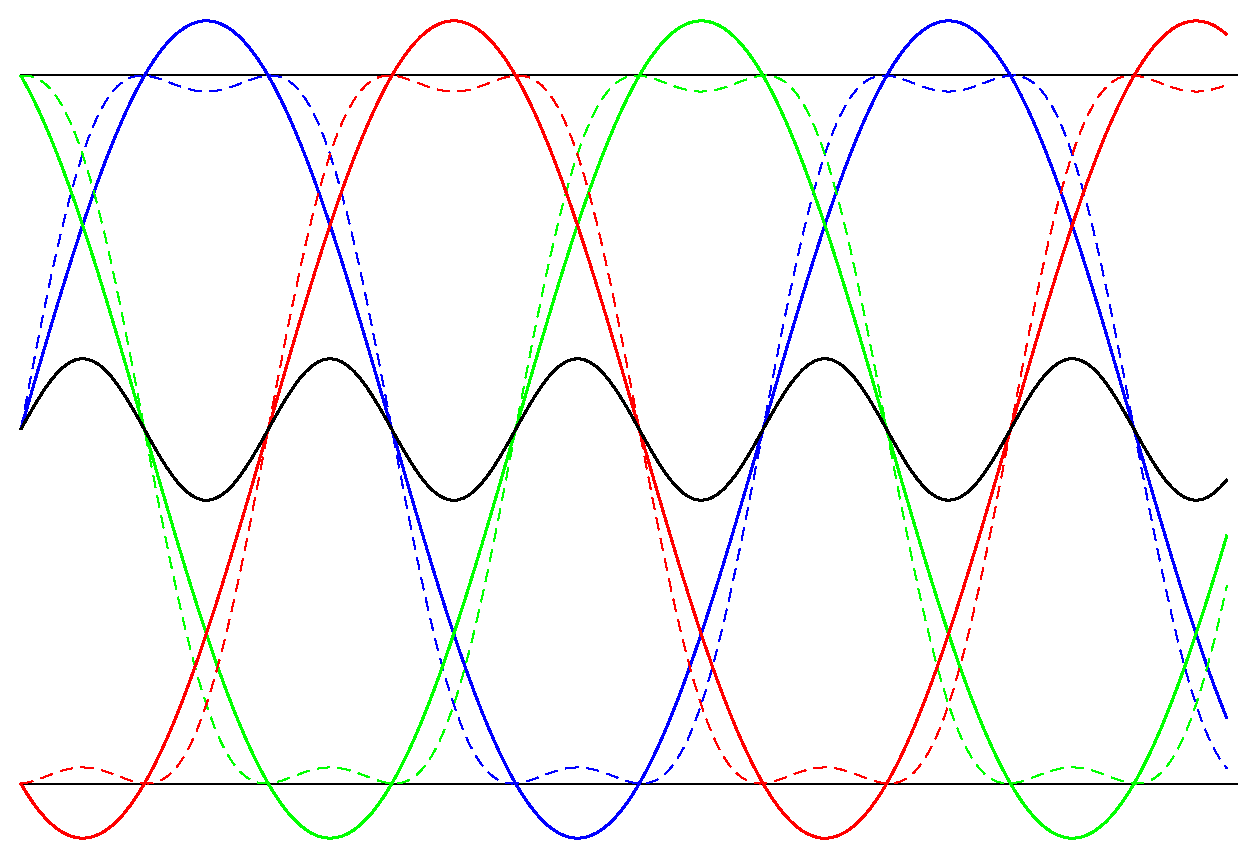
三相及其一次和三次谐波。请注意,三次谐波(黑色)是所有三相共有的。
现在更像了!我们现在已经成功地规避了最大电压输出方面的物理限制,并通过使用三次谐波注入将其巧妙地打包。
接下来我们将看看电机对此有何看法。谐波几乎总是一种不需要的现象,所以让我们检查一下后果。
右图说明了具有三次谐波注入的所有三相电压。
有些人可能会注意到这些曲线有些奇怪;黑色的三次谐波曲线是所有三相共有的。这三个都叠加并且完全相同,这意味着三次谐波现在是一种共模 波形。现在电机电路的所有部分都将以三倍于直流链路的频率振荡。
连接到电动机相中性点的电压表。这将揭示电机绕组电压以及三次谐波是否会对它们产生任何影响。
现在特别关注电机的中性点。现在的问题变成:
每个绕组的相对中性电压是多少?
回想一下,相 电压由一个大正弦波和一个加在一起的三次谐波组成。示波器现在将显示相电压(图中左侧探头) 减去 中性线电压(右侧探头)。
还要记住,电机中的每个点都以三次谐波频率和振幅振荡,包括中性点。因此,中性连接的探头也会看到相同的三次谐波,这在相连接的探头处是可测量的。
那么数学就变成了这样:(大正弦波+三次谐波正弦波)- (三次谐波正弦波)=(只有大正弦波)
哦耶。整个三次谐波分量消失了,绕组甚至不知道。
调制系数
这是一个非常简单的用于缩放电压的因素。在上一节中表明,通过应用三次谐波注入可以将输出电压放大至 115.4%。即调制系数可以从 0 到 1.154
输出相间电压的公式变为

在这里m表示调制系数。
下面的动画说明了这个概念:
电压作为调制系数 m 的函数。通过使用三次谐波注入,可以合成 0 < m < 1.154 的平滑正弦波
本文翻译自https://www.switchcraft.org/learning/2017/3/15/space-vector-pwm-intro
基于空间矢量的两电平SVPWM仿真 核心实现采用m语言编写可方便移植进各种嵌入式CPU或者MPU
计算基本为以下几步
%%-----------------------------------------------
%%扇区判断
%%-----------------------------------------------
%%相邻两矢量作用时间计算以及抗饱和
%%-----------------------------------------------
%%比较器切换点计算
%%-----------------------------------------------
%%占空比输出
上图为m语言与Matlab自带两电平SVPWM生成器对比
基于空间矢量的三电平SVPWM仿真 核心实现采用m语言编写可方便移植进各种嵌入式CPU或者MPU
计算基本为以下几步
%计算参考矢量uref
%计算uref的幅值和相角
%计算大扇区
%计算小扇区
%定义调制比
%计算矢量作用时间
%计算占空比
%% 扇区分配上图为m语言与Matlab自带三电平SVPWM生成器对比
本文模型可在如下下载 基于MATLAB2022B
https://download.csdn.net/download/happy_baymax/87685426


















 7488
7488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











