






文章来源:http://t.csdn.cn/jnImX
毕设是关于slam和导航的,现在需要对ros架构进行系统的学习。
ROS架构分为三层:
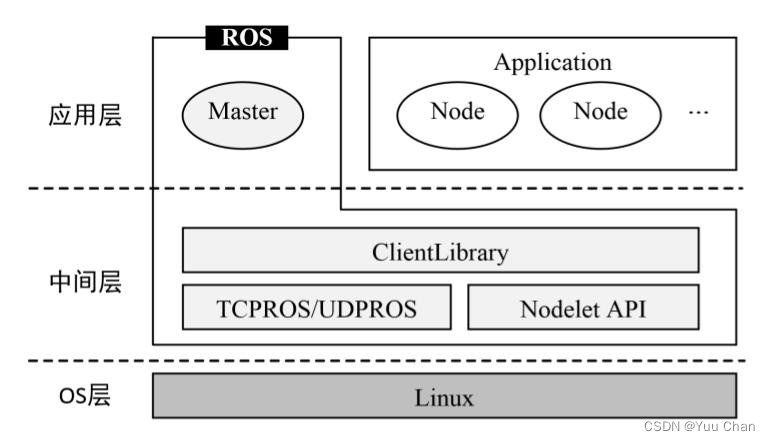
os层:在linux操作系统下
中间层:TPCROS/UDPROS和Nodenet API (实时性考虑)等
应用层:ros有一个master管理整个系统,其中包括了很多的功能包,功能包是用过节点的形式运行。
这是ROS的基础架构。理解这个架构之后,再从系统的实现上去看ros的三个层次:计算图、文件系统、开源社区。
开源社区,有许多ros的学习路径。
计算图是关于节点运行的。节点、消息、话题、服务是ros中的关键。理解了他们基本上就理解了ros中功能包的运行过程。
- 节点node。节点很形象,就是段对端的连接关系。
- 消息msg。节点之间是通过传送消息进行通讯的,每一个消息都是一个严格的数据结构。
- 话题topic。消息的传递又是通过(Publish/Subscribe)的方式进行。一个节点针对一个topic发布消息,另一个节点可以关注每个话题并订阅特定类型的数据。一个叫talker,一个叫listener。
- 服务service。ros master相当于一个控制器来连接talker和listener。具体用服务干什么还没理解到。
文件系统是ros中文件的创建格式。通过一定的规则进行组织,这样就能轻松理解和使用该文件空间中的代码。
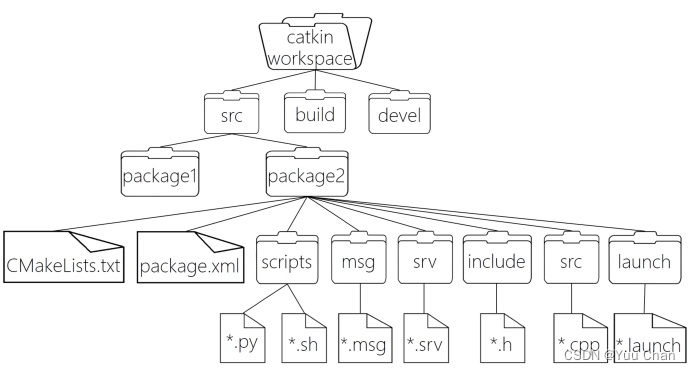
从catkin_make开始——
build:编译空间,存放cmake/make,catkin的存缓信息等(编译基本是在这进行)
devel:开发空间,存放编译后生成的目标文件等(最重要的应该是source ~/catkin_workspace/devel/setup.bash,从而让环境变量生效)
src:存放源码
src中可以有多个功能包
功能包中又可以细分:CMakeList.txt编译的基本配置
package.xml包信息
scripts——里面有.py和.sh的python脚本
msg——消息通讯格式文件
srv——服务通讯格式问价
launch——可以一次性运行多个节点
config——配置信息
以上就是ros的基础知识,了解到这种程度后就可以开始学习代码了。
















 4810
4810











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











