







ImuTypes.cc
IntegratedRotation::IntegratedRotation(const Eigen::Vector3f &angVel, const Bias &imuBias, const float &time) {
//这个方法主要是构建 旋转测量量,并未开始计算积分,公式 15-29
// delta_R_ij(测量) = 连乘 Exp(( w - b) * delta_t)
// ( w - b)
const float x = (angVel(0)-imuBias.bwx)*time;//公式 15-29 的 (w-b)* delta_t
const float y = (angVel(1)-imuBias.bwy)*time;
const float z = (angVel(2)-imuBias.bwz)*time;
//distance用来判断是否要用罗德里格斯公式,或是用简化公式
const float d2 = x*x+y*y+z*z;// distance的平方
const float d = sqrt(d2); //distance
Eigen::Vector3f v;
v << x, y, z;
Eigen::Matrix3f W = Sophus::SO3f::hat(v); //公式 15-1 将向量转成反对称矩阵
if(d<eps)//旋转角度很小,distance < 一个很小的量,所以W也是很小的值 ,这个时候罗德里格斯公式和以下的几乎一样
{
deltaR = Eigen::Matrix3f::Identity() + W;
rightJ = Eigen::Matrix3f::Identity();
}
else
{ // 将反对称矩阵转换成旋转向量
deltaR = Eigen::Matrix3f::Identity() + W*sin(d)/d + W*W*(1.0f-cos(d))/d2; //罗德里格斯公式,公式 15-3
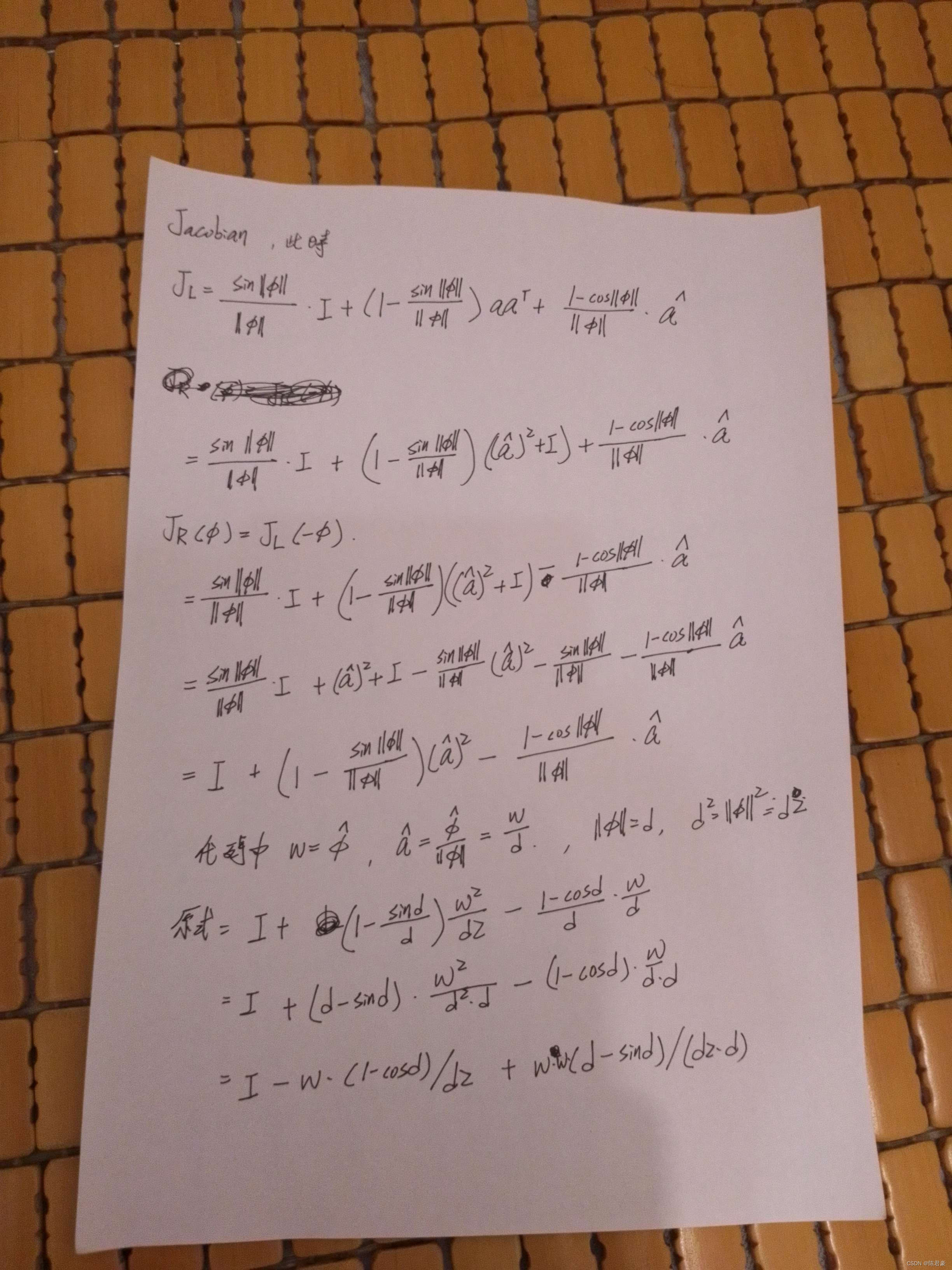
rightJ = Eigen::Matrix3f::Identity() - W*(1.0f-cos(d))/d2 + W*W*(d-sin(d))/(d2*d);//右雅克比公式,公式 15-8
}
}















 619
619











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









