






https://arxiv.org/abs/2206.09474
摘要
目标检测的目的是智能的检测出自动驾驶车辆周围的3D的目标物的位置,尺寸,类别,是感知的重要环节。
介绍
感知的输入:摄像头、激光雷达、毫米波雷达、高精地图
感知的输出:路上的关键的几何以及语义信息
高质量的感知输出,是下游任务,决策规划的重要输入。
感知包含的具体细分任务:
目标的检测和跟踪
车道线检测
语义和目标的分割
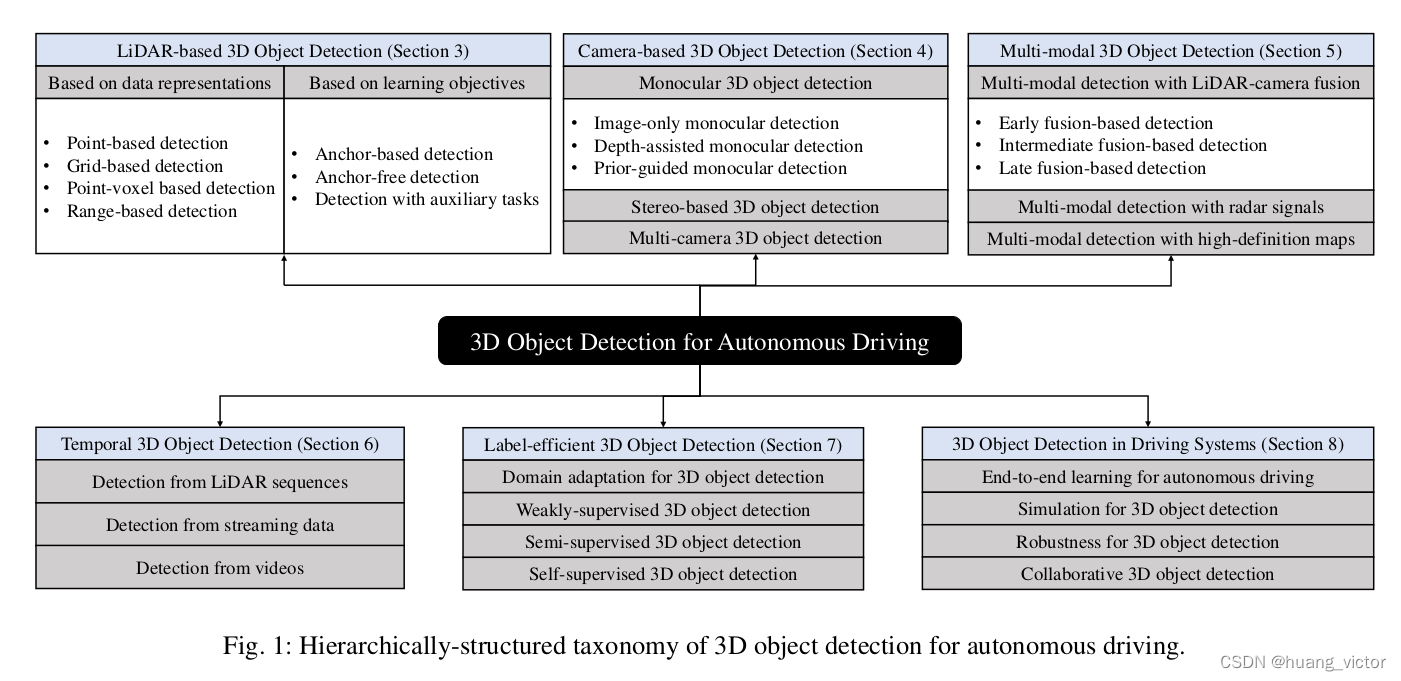
如下是此综述的主要内容:
背景:
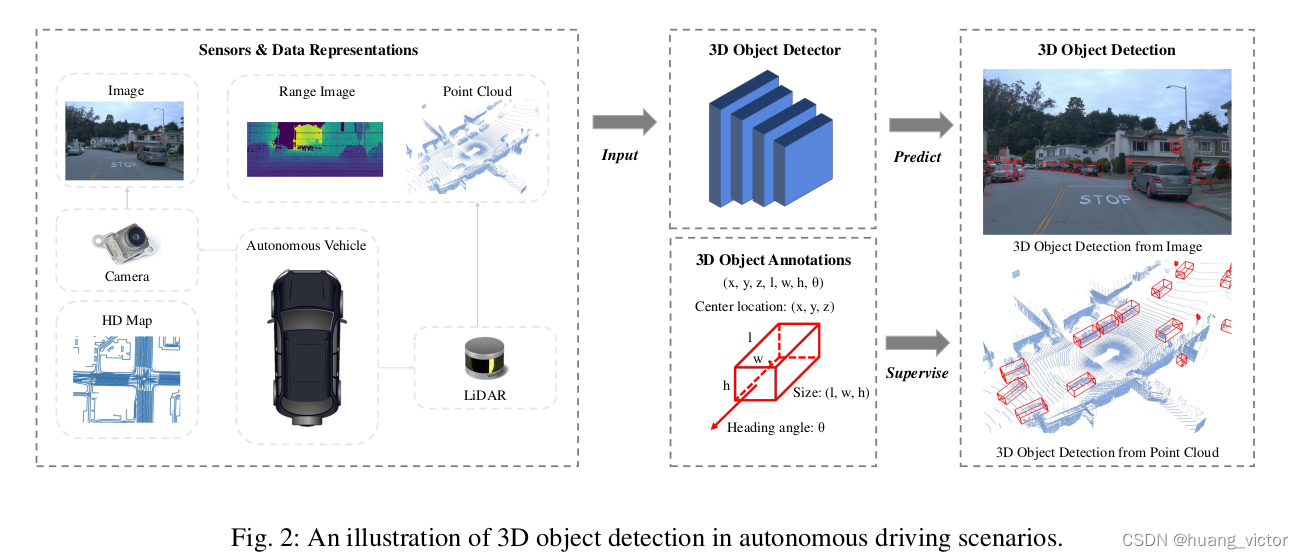
1. 什么是3D检测:
给定传感器信息,输入到模型,得到3D的检测框。
B = [cx,cy,cz,l,w,h,Θ,class,vx,vy]
摄像头图像:
表达形式, WxHx3
优点,便宜,语义信息丰富
缺点,从某个特定视角记录世界表面,无结构信息,无深度信息,受天气和光照影响大
激光点云:
表达形式,WxHxN(range, intensity, elongation etc), NxM(N pints, x,y,z,intensity,elongation)
优点,精细的3D结构信息,带深度信息
缺点,很贵,也有cornercase(在雨天,雪天,高反,低反,强光下,会出现不同的缺陷,如噪点,高反鬼影,高反膨胀)
3D和2D目标检测任务的对比:
2D的目标检测相对比较成熟,3D的目标检测借鉴了很多框架和方法,比如: proposal generation,refinment,anchors, nms etc;
3D目标检测需要处理异质数据,点云和图像;
3D目标检测需要考虑多个视角,bev, point_view, cylindrical_view, perspective view;
3D目标检测需要更精准的定位误差;
3D车端目标检测和室内3D目标检测对比:
车端的检测范围要求很大;
车端的点云分布往往更稀疏,距离差别较大,密度差距也较大;
车端的对效率要求很高,需要实时性。
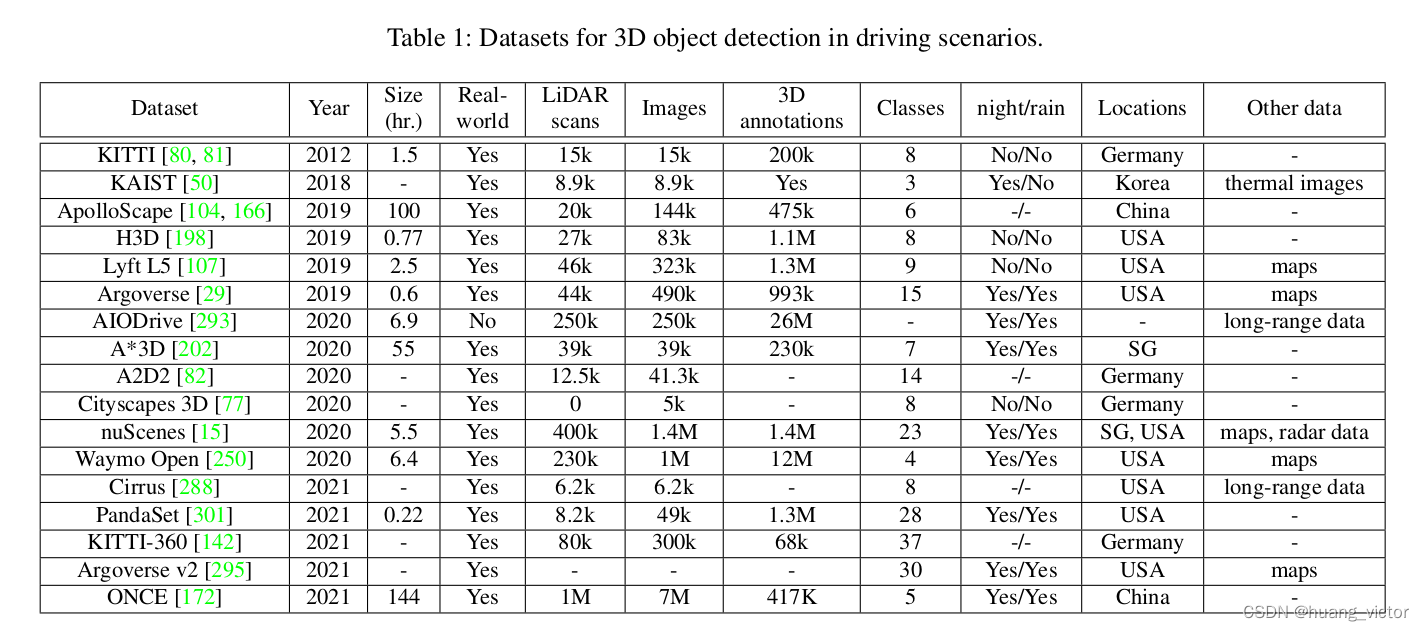
2. 数据集
kitti是师祖,其他的在如下维度进行扩增,目前常用的waymo, nuscenes
更多的数据
更丰富的场景
更多的标注类别
更多模态的传感器数据 image, pointcloud, gps,imu, radar, map
3. 评价的指标
沿用2D的评价指标,mAP
机器学习算法评估指标——3D目标检测_格物钛工程师的博客-CSDN博客_3d目标检测的评价指标
根据实际的下游任务,以及实际的场景,去生成评价结果。
waymo当前的,按距离,按照类别的mAP可以适当参考。这里可以结合当前市场上主机厂的一些具体的要求做一下展开。

















 2098
2098

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









