






 本文介绍了Stewart平台的六自由度反解算法,通过给定姿态数据计算电动缸位置,涉及C#编程实现,并提到OpenGL与Maya坐标系转换。作者提供有偿的C#逆解程序设计服务,价格30元,仅对明确表示购买意向的学生开放。
本文介绍了Stewart平台的六自由度反解算法,通过给定姿态数据计算电动缸位置,涉及C#编程实现,并提到OpenGL与Maya坐标系转换。作者提供有偿的C#逆解程序设计服务,价格30元,仅对明确表示购买意向的学生开放。
Stewart六自由度平台正反解算法
前言
提示:这里可以添加本文要记录的大概内容:
6自由度平台反解算法
提示:以下是本篇文章正文内容,下面案例可供参考
一、反解计算
如下图所示,摇摆型六自由度

通过给定的六个姿态数据计算六个电动缸的位置长度。
选好坐标系,数学建模。下平台固定,上平台运动。计算上平台6个坐标点经过运动变换之后计算出新的坐标点。计算上平台新的坐标点和下平台固定坐标点的两点距离,即可计算出电动缸新的长度。
二、C#逆解计算程序设计
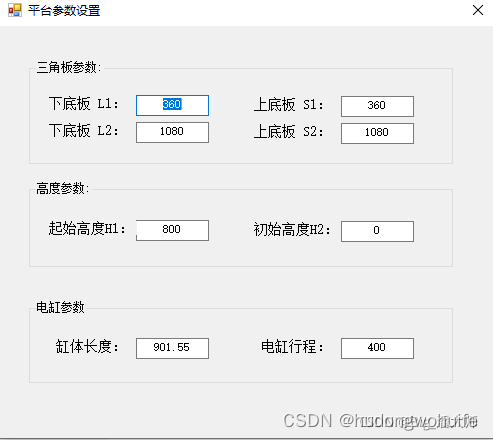

OpenGL跟Maya坐标系
OpenGL坐标系跟欧拉坐标系不一样,所以在软件界面显示的时候需要转换一下。
总结
C#逆解下载私聊我,有偿出售。在校本科生勿扰 表明来意不然不通过。 价格统一 30元
















 3352
3352











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









