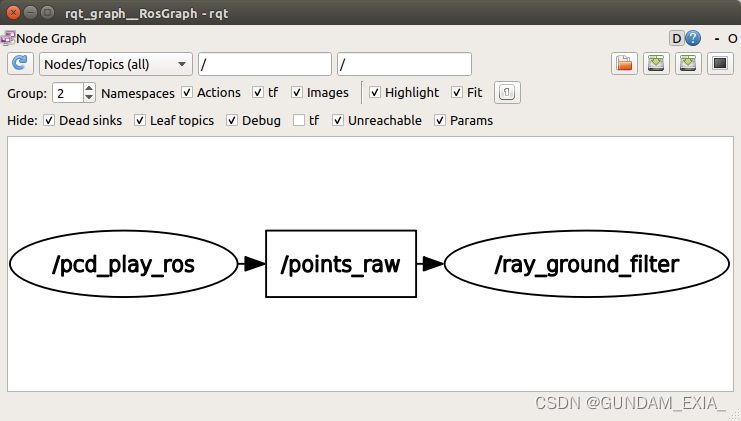
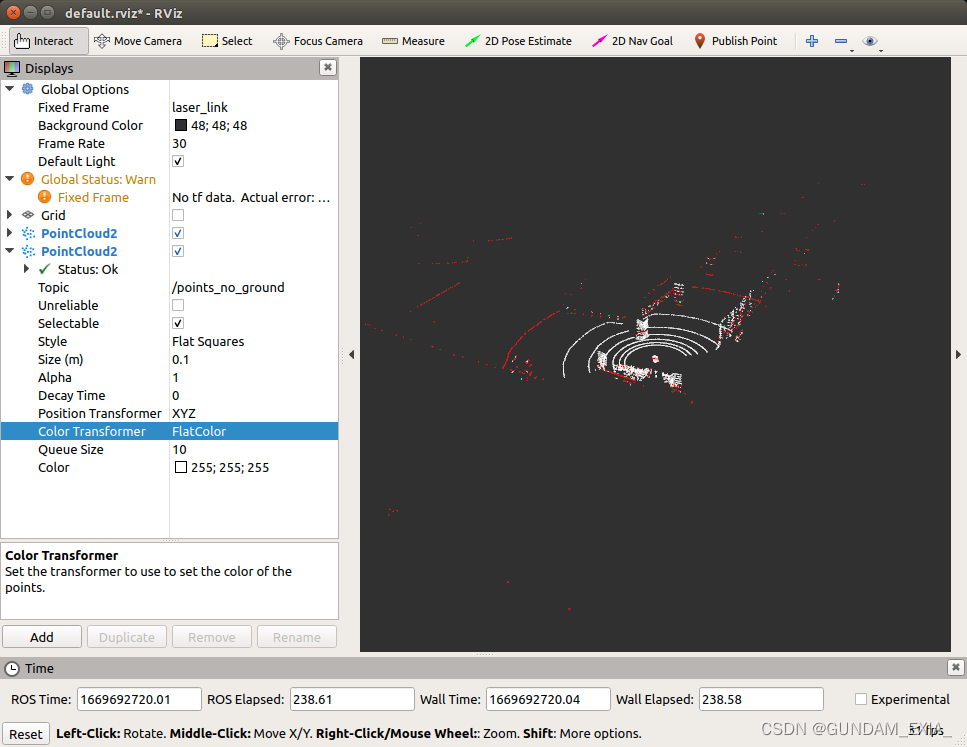
【ROS】【点云】用ros功能包播放pcd点云文件并地面分割
最新推荐文章于 2023-10-30 22:38:24 发布

 6817
4407
6817
4407











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言