







如图所示,在XY坐标是不规则的托盘,怎么实现输入一个点编号就能得到实际坐标值呢?
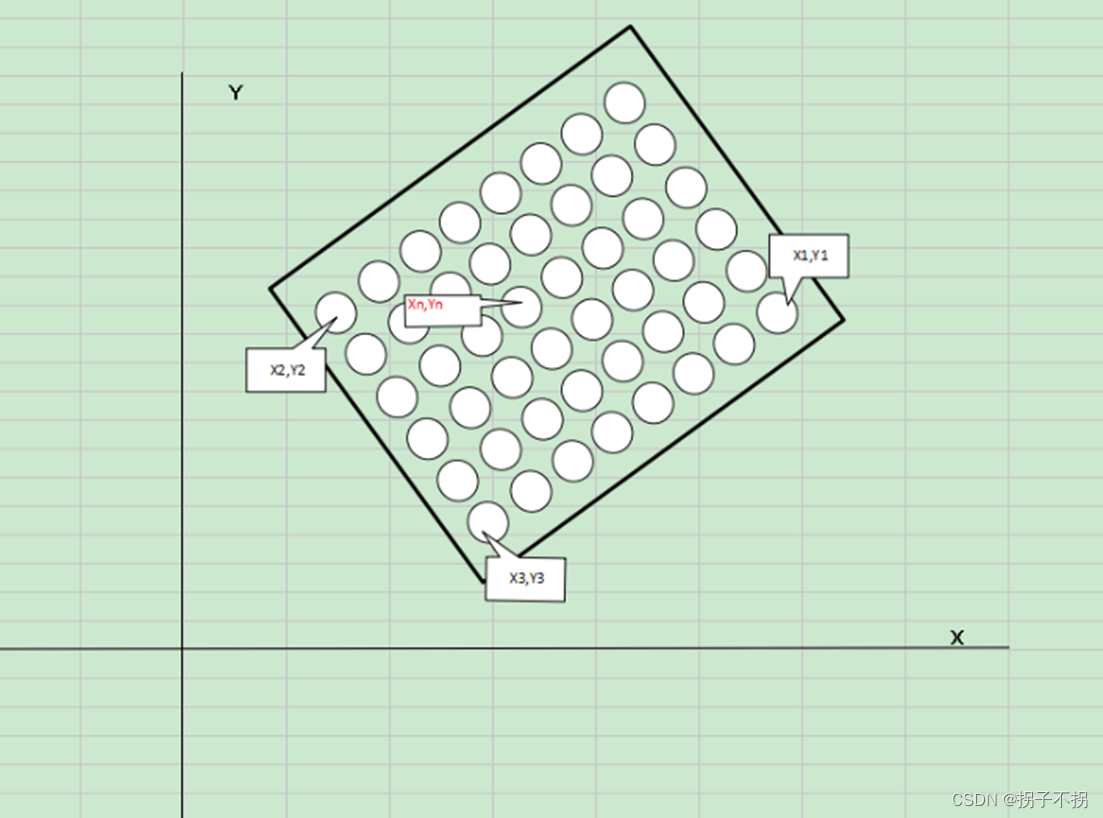
首先必须托盘内每个工位(放置工件)是很规则的,间隔误差小于工装最大误差!
为了方便理解,我又重新用CAD绘制了2种常用的托盘:
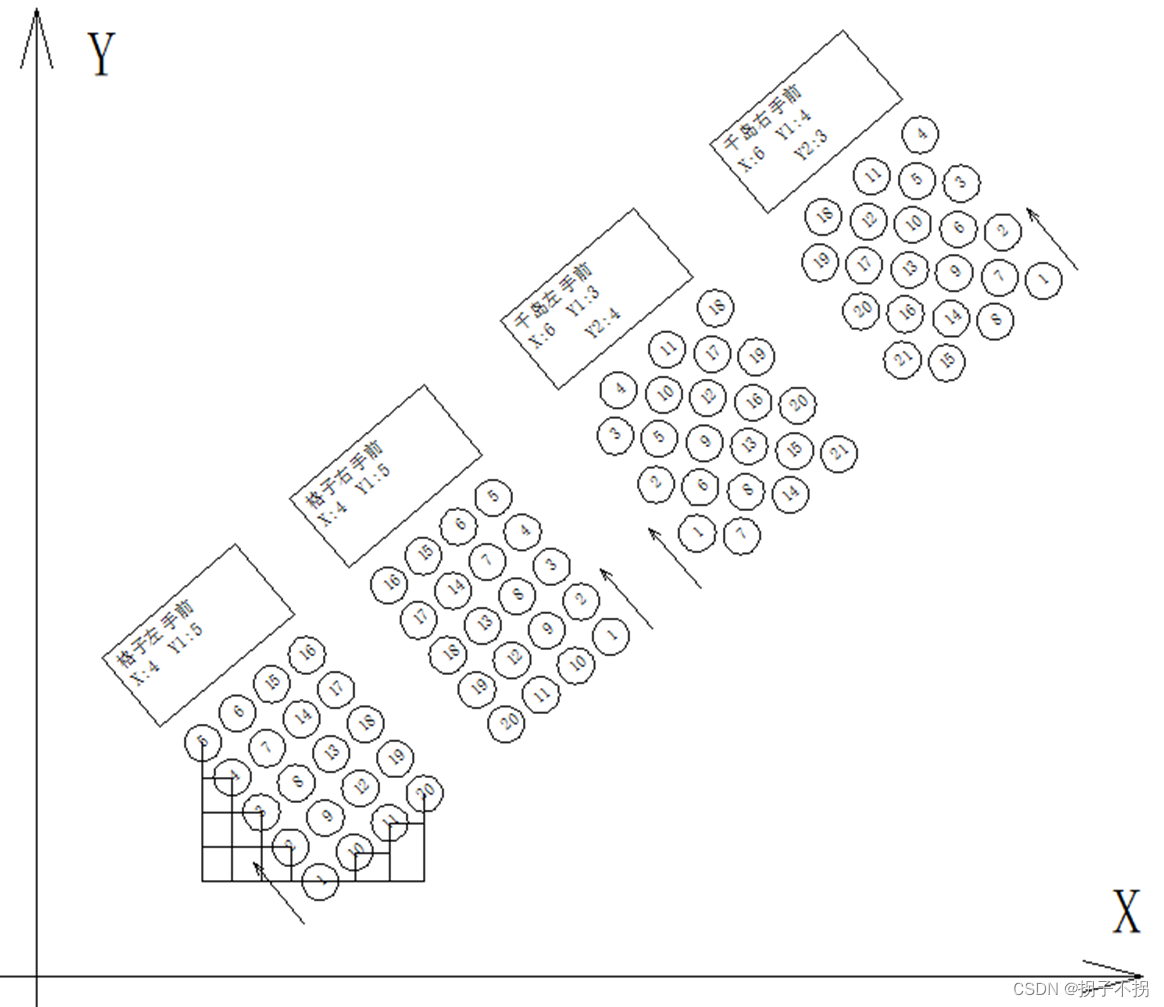
以上2种托盘,每种2个起始点不同,他们是怎么实现的?
设计思路:因为每个点,相对间距规则,所以相对机械坐标系X或Y方向的垂直点间距也是规则。找到各点的垂直点与起点的X方向或Y方向偏移值就可以得到该点所在机械坐标系位置。不需要使用过于复杂的数学函数算法,只需要使用加减乘除就可以实现了。
只要有点数学几何基础的相信看过上面图片,就知道怎么做了。
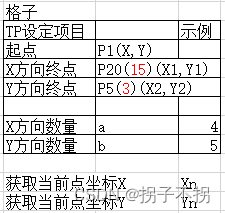
下面是我实现这个功能,做的程序:
定义3个点位坐标、X方向和Y方向数量和间距
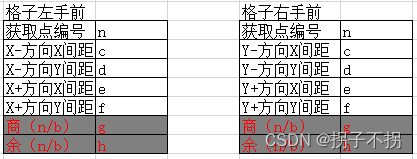
格子左手前,算术如下:
c=|X2-X|/b
d=|Y2-Y|/b
e=|X1-X|/a
f=|Y1-Y|/a
g=商(n/b)
h=余(n/b)
'P10
X(P10)=e*1*(+1)+X
Y(P10)=f*1*(+1)+Y
'P11
X(P11)=e*2*(+1)+X
Y(P11)=f*2*(+1)+Y
'P20
X(P20)=e*3*(+1)+X
Y(P20)=f*3*(+1)+Y
'计算1-5排列坐标
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7429
7429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











