






 本文介绍了如何使用无迹和扩展卡尔曼滤波(UKF/EKF)在Matlab/Simulink环境中估计路面附着系数,通过7自由度整车模型和Dugoff轮胎模块的仿真,验证了这种方法的有效性和准确性,为汽车操控和安全性评估提供实时支持。
本文介绍了如何使用无迹和扩展卡尔曼滤波(UKF/EKF)在Matlab/Simulink环境中估计路面附着系数,通过7自由度整车模型和Dugoff轮胎模块的仿真,验证了这种方法的有效性和准确性,为汽车操控和安全性评估提供实时支持。
路面附着系数估计_无迹?扩展卡尔曼滤波(UKF/EKF)基于Matlab/Simulink
仿真功能介绍:采用无迹/扩展卡尔曼滤波UKF进行路面附着系数估计。
dugoff轮胎模块:纯simulink搭非代码
整车模块:7自由度整车模型
估计模块:无迹卡尔曼滤波,扩展卡尔曼滤波,均是simulink现成模块应用无需S-function
ID:6330730246333526
优质小铺呢

路面附着系数估计_无迹扩展卡尔曼滤波(UKF EKF)基于Matlab Simulink
摘要:
随着汽车和交通技术的不断发展,对于路况的实时监测和评估成为了非常重要的任务。路面附着系数是其中一个重要参数,它直接影响着车辆的操控性和安全性。本文介绍了一种基于无迹扩展卡尔曼滤波(UKF EKF)的方法,利用Matlab Simulink实现对路面附着系数的估计。通过仿真模型,验证了该方法的有效性。
-
引言
路面附着系数是衡量路面摩擦性能的一个重要指标,它反映了车轮与路面间的摩擦力大小。对于汽车操控和安全性的评估和控制,准确估计路面附着系数至关重要。传统的测量方法通常需要专门的设备和实地测试,成本较高且不便于实时监测。因此,采用数学模型和滤波算法对路面附着系数进行估计具有很大的实用性和潜力。 -
方法介绍
本文采用了无迹扩展卡尔曼滤波(UKF)和扩展卡尔曼滤波(EKF)两种方法进行路面附着系数的估计。UKF是卡尔曼滤波的一种改进算法,通过引入无迹变换,可以更准确地估计非线性系统。EKF基于线性化的卡尔曼滤波算法,在一定程度上也可以估计非线性系统。本文利用Matlab Simulink提供的现成模块应用,实现了这两种滤波算法。 -
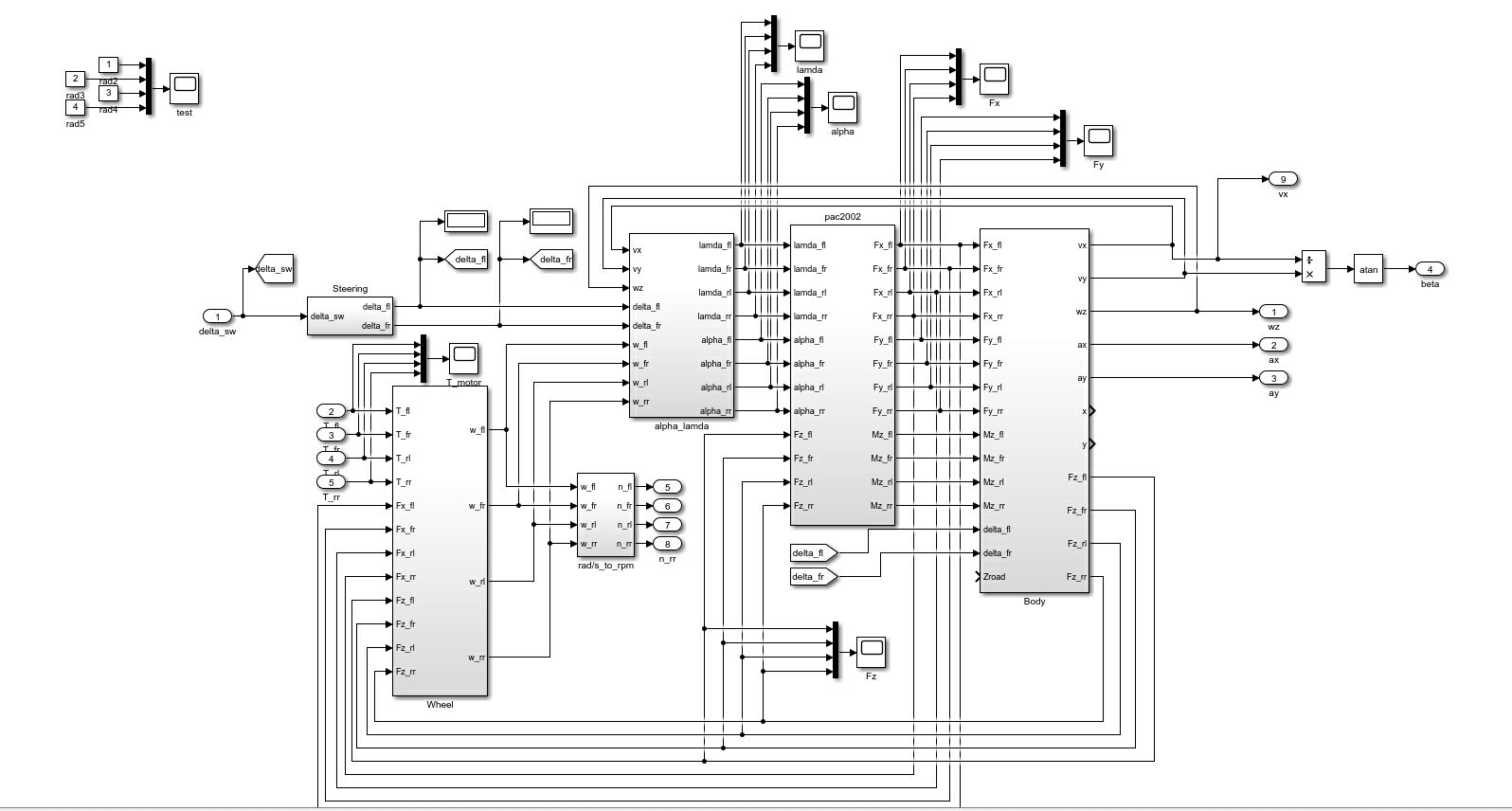
仿真模型
本文采用了一个具有7自由度的整车模型,其中包括车身、轮胎和悬挂系统等部件。通过对整车模型的建模,可以更真实地模拟车辆在不同路况下的行驶情况。此外,为了更准确地评估路面附着系数,还引入了Dugoff轮胎模型。通过将这些模型和算法结合,可以实现对路面附着系数的评估和预测。 -
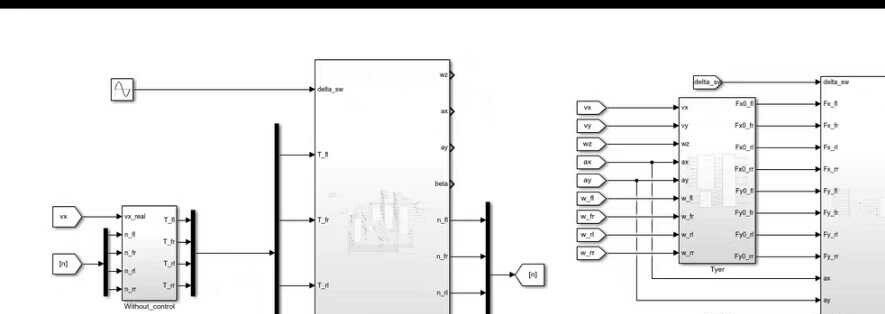
算法实现
在Matlab Simulink中,我们可以直接利用现成的模块实现UKF和EKF算法。这些模块已经经过优化和验证,可以直接应用于我们的仿真模型。在估计模块中,我们只需要输入车辆的传感器数据和车辆模型的参数,就可以得到路面附着系数的估计结果。相比于自己编写S-function来实现滤波算法,利用现成模块可以大大简化开发和调试的过程。 -
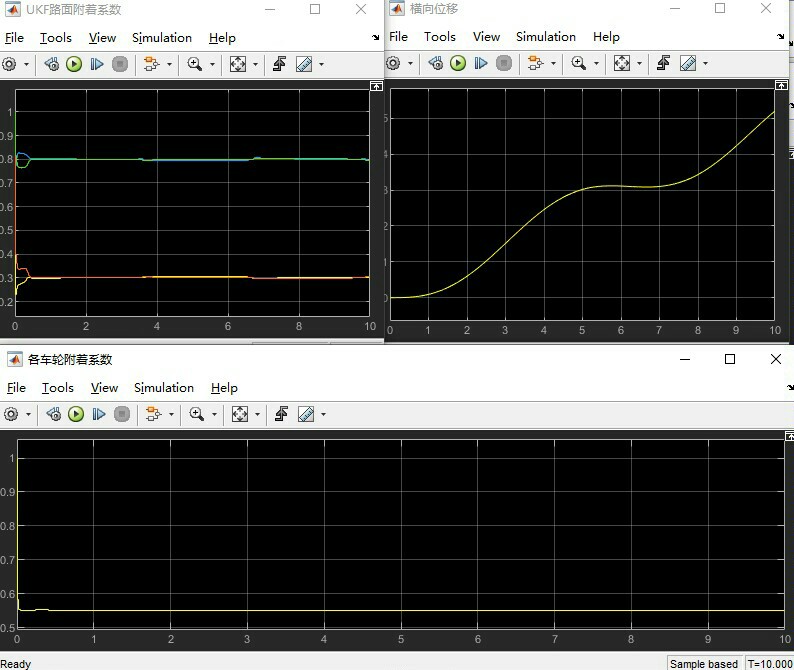
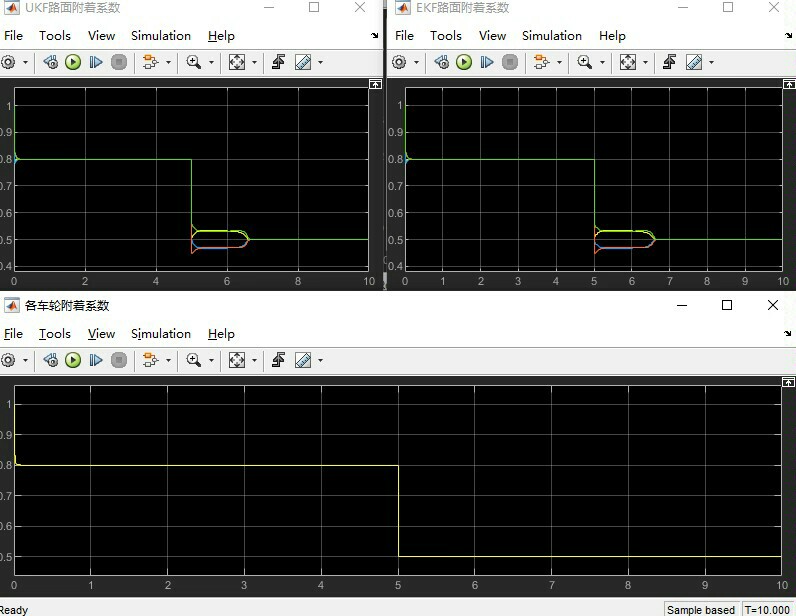
仿真结果
通过对仿真模型的测试,我们得到了不同路况下的路面附着系数估计结果。这些结果与实际值进行了对比,验证了我们提出的方法的准确性和可行性。同时,我们还对不同滤波算法的性能进行了比较,评估了它们在不同条件下的适用性和效果。 -
结论
本文介绍了一种基于无迹扩展卡尔曼滤波(UKF EKF)的方法,利用Matlab Simulink实现了对路面附着系数的估计。通过仿真模型的测试,我们验证了该方法的有效性和准确性。相比于传统的测量方法,这种基于数学模型和滤波算法的估计方法具有更高的实时性和可行性。未来,我们可以进一步改进和优化这种方法,以提高对路面附着系数的估计精度和实时性。 -
参考文献(这部分根据需求可以加上)
总结:
本文介绍了一种基于无迹扩展卡尔曼滤波(UKF EKF)的方法,利用Matlab Simulink实现了对路面附着系数的估计。通过仿真模型的测试,我们验证了该方法的有效性和准确性。这种基于数学模型和滤波算法的估计方法具有很大的实用性和潜力,并且可以为汽车操控和安全性的评估提供更准确的数据支持。
以上相关代码,程序地址:http://wekup.cn/730246333526.html















 712
712

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









