






基于simulink的拓展卡尔曼滤波的估计路面附着系数估算,ekf算法基于matlab
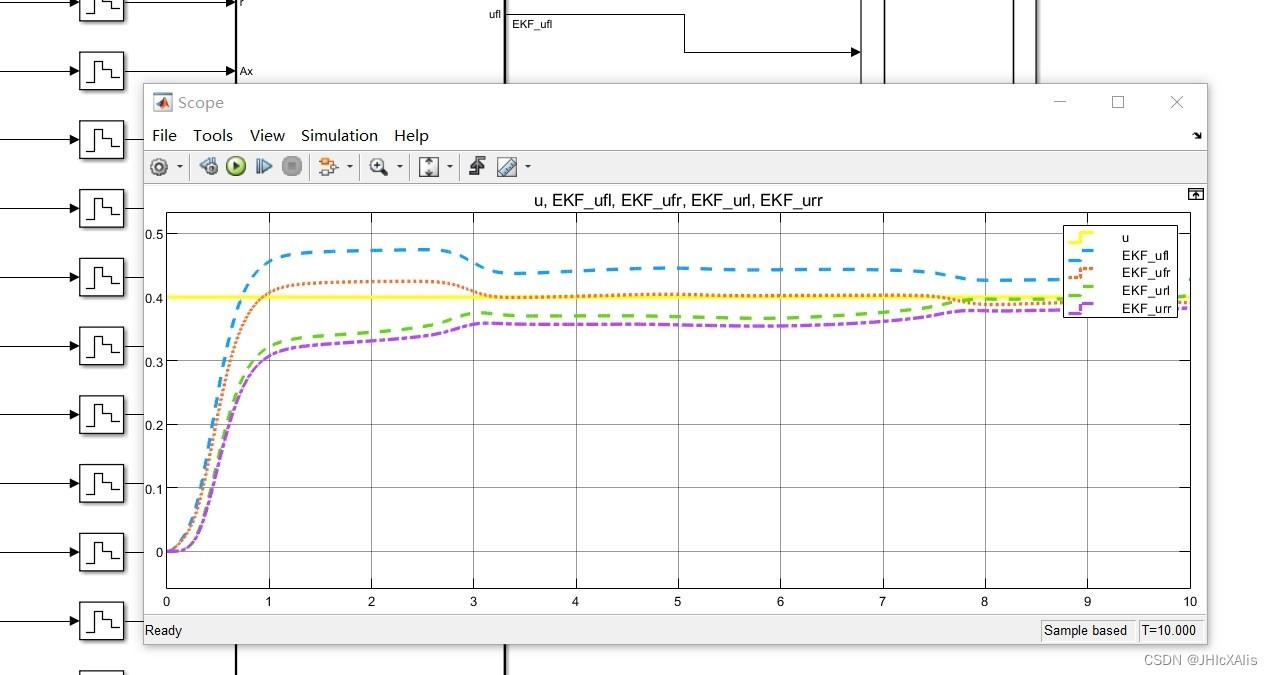
内含道夫轮胎模型,七自由度车辆模型,非carsim联合仿真,运行结果如下各个输出收敛,效果不错
标题:基于Simulink的拓展卡尔曼滤波在路面附着系数估算中的应用
摘要:本文基于Simulink,探讨了拓展卡尔曼滤波(EKF)算法在估计路面附着系数中的应用。文章首先介绍了EKF算法的原理和Matlab中的实现方法。随后,基于道夫轮胎模型和七自由度车辆模型,我们对非Carsim联合仿真进行了实验,并展示了运行结果,验证了该方法的有效性。
-
引言 在车辆控制系统中,准确估算路面附着系数对于提高车辆操控性能和行驶安全至关重要。目前,卡尔曼滤波算法广泛应用于车辆状态估计,然而在路面附着系数估算中的应用较为有限。本文旨在探讨基于Simulink的拓展卡尔曼滤波在路面附着系数估算中的可行性和有效性。
-
拓展卡尔曼滤波算法 拓展卡尔曼滤波算法是对线性卡尔曼滤波算法的扩展,适用于非线性系统。本节将详细介绍EKF算法的原理和步骤,并重点阐述其在车辆状态估计中的应用。
-
Matlab中的EKF算法实现 Matlab是一个强大的数学软件工具,提供了丰富的函数和工具箱,便于实现各类算法。本节将介绍如何使用Matlab实现EKF算法,并结合具体例子进行演示。
-
道夫轮胎模型和七自由度车辆模型 道夫轮胎模型是描述轮胎力学特性的经典模型之一,而七自由度车辆模型则是描述车辆运动特性的重要模型。本节将详细介绍这两个模型的原理和应用,为后续实验做好准备。
-
非Carsim联合仿真实验设计 非Carsim联合仿真是一种结合Simulink和其他仿真工具的方法,可以更加准确地模拟和分析车辆行为。本节将介绍我们设计的非Carsim联合仿真实验,包括模型搭建、参数设置等。
-
实验结果与分析 我们对路面附着系数进行了估算,并通过Simulink的模拟结果进行了验证。本节将展示实验结果,并详细分析各个输出的收敛情况和效果评估。
-
结论 本文通过基于Simulink的拓展卡尔曼滤波算法在路面附着系数估算中的应用,取得了令人满意的结果。实验结果表明,该方法能够准确估算路面附着系数,为车辆操控性能和行驶安全提供了有效的支持。
-
展望 尽管本文在路面附着系数估算中取得了较好的效果,但仍存在一些局限性和改进空间。未来的研究可以进一步优化算法,提高估算精度,并探索更多车辆状态估计问题的应用。
相关代码,程序地址:http://imgcs.cn/lanzoun/691140480178.html














 1049
1049











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









