







源代码地址:
https://github.com/roboticslibrary/rl
用于机器人运动学、运动规划和控制。它涵盖数学、运动学和动力学、硬件抽象、运动规划、碰撞检测和可视化。
官方网址:
https://www.roboticslibrary.org/
Robotics Library(简称RL)是一个独立的C++库,用于机器人运动学、运动规划和控制。它为研究人员、工程师和开发人员提供了一个功能强大的工具,以便在机器人技术领域进行创新和开发。RL涵盖了数学、运动学和动力学、硬件抽象、运动规划、碰撞检测和可视化等方面,为机器人应用的开发提供了全面的支持。
以下是RL的主要特点:
1. 运动学:RL提供了用于计算机器人几何、运动和姿态的函数和类。这包括正向和逆向运动学、姿态和轨迹计算等。
2. 动力学:RL支持各种动力学计算,如重力、摩擦力和碰撞检测等。这些功能有助于模拟机器人在不同环境中的运动和相互作用。
3. 硬件抽象:RL提供了一个硬件抽象层(HAL),用于模拟和控制各种机器人硬件,如电机、传感器和执行器等。这使得RL可以与多种机器人硬件平台兼容。
4. 运动规划:RL包含多种运动规划算法,如RRT、PRM、A*等。这些算法可以帮助机器人在复杂环境中找到一条从起点到终点的最优路径。
5. 碰撞检测:RL提供了一种高效的碰撞检测算法,可以在机器人运动过程中实时检测到潜在的碰撞,以确保机器人的安全运行。
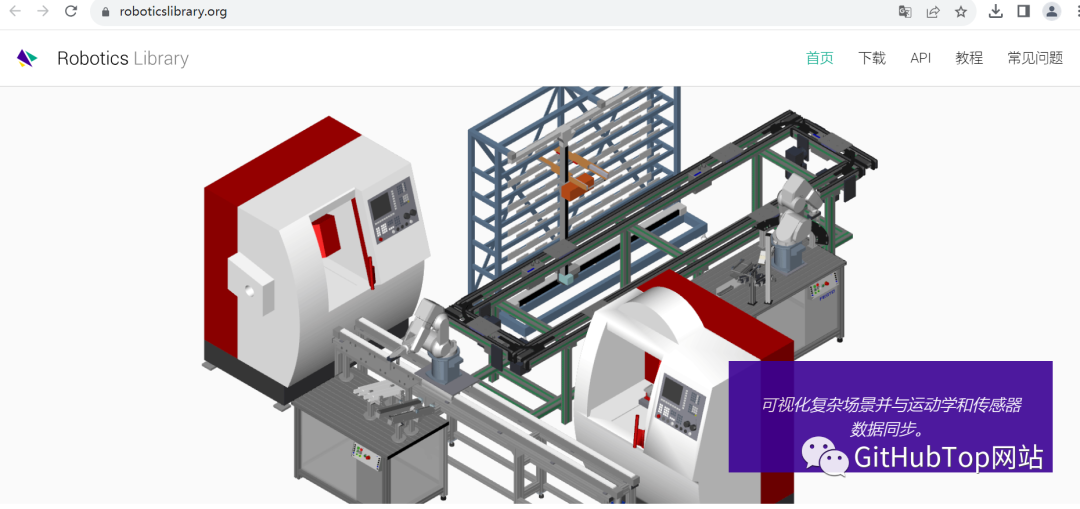
6. 可视化:RL支持三维可视化,可以直观地显示机器人的运动和姿态。这有助于用户更好地理解机器人的行为和性能。
7. 跨平台:RL支持多种操作系统,如Windows、Linux和macOS等,可以在不同平台上进行开发和部署。
8. 开源:RL是一个开源项目,用户可以免费使用和修改源代码,以满足自己的需求。
总之,Robotics Library是一个功能强大的C++库,适用于机器人运动学、运动规划和控制等领域。它为机器人应用的开发提供了一个全面的支持,可以帮助用户快速实现各种复杂的机器人系统。
原文链接:















 1250
1250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









