







1 背景
自动驾驶算法通常包括几个子任务,包括3D物体检测、地图分割、运动预测、3D占用预测和规划。近年来,端到端方法将多个独立任务整合到多任务学习中,优化整个系统,包括中间表示,以实现最终的规划任务。随着端到端技术的量产,越来越多的研究开始投入到这方面,本篇博客和读者朋友们分享的是中科大研究团队发表的一篇论文。
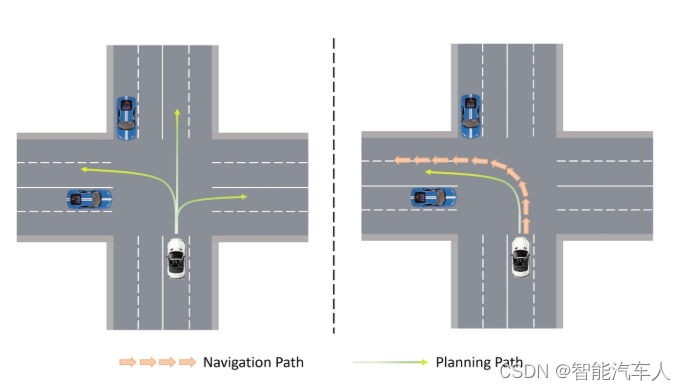
现有的很多一段式端到端大模型,特别是VLM模型中,接收的更多的是导航的指令,比如直行,左转或者右转,而不是整条导航的路径信息。而多段式的planner大模型中,导航会作为模型的输入。这两种方式都不是特别完整,最终的方案肯定是一段式端到端大模型,且地图,导航,摄像头,激光雷达等传感器的输入都应作为大模型的输入,然后另一端输出轨迹。
2 文章内容
本篇博客主要介绍一篇论文,

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1325
1325

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











