







一、Gmapping是基于粒子滤波的算法。
缺点:严重依赖里程计,无法适应无人机及地面不平坦的区域,无回环(激光SLAM很难做回环检测),大的场景,粒子较多的情况下,特别消耗资源。
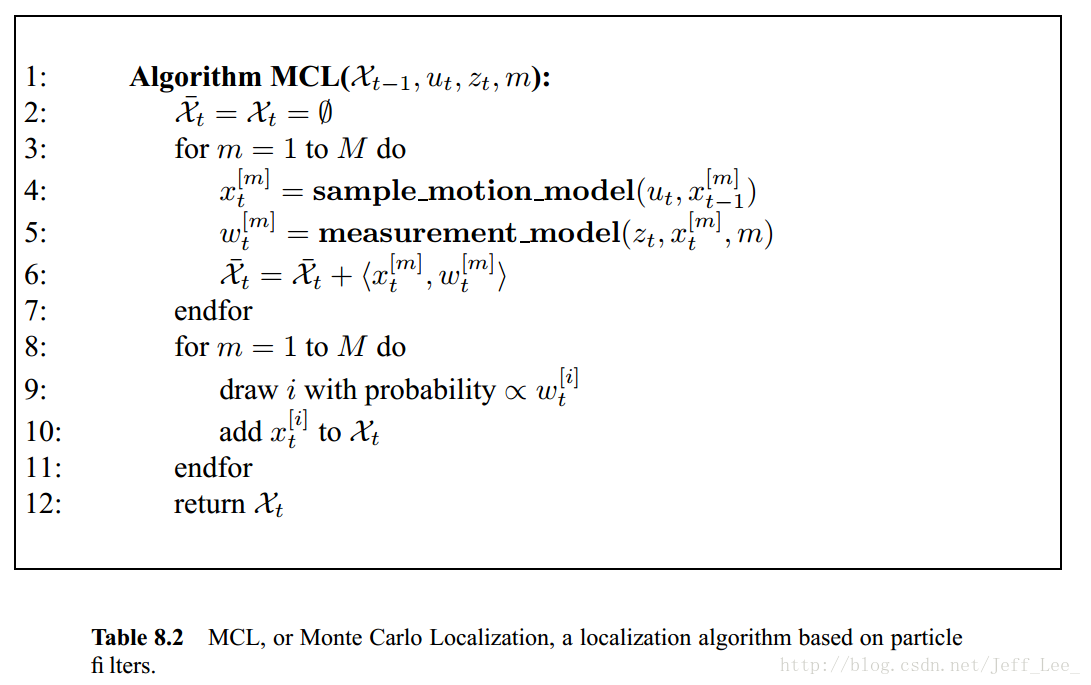
源码的核心函数:processScan()
算法框架:
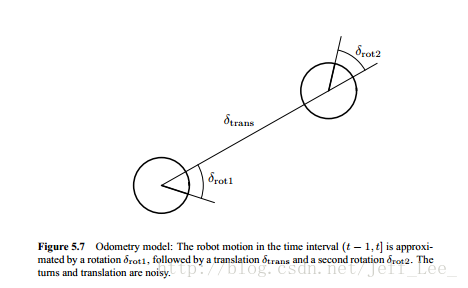
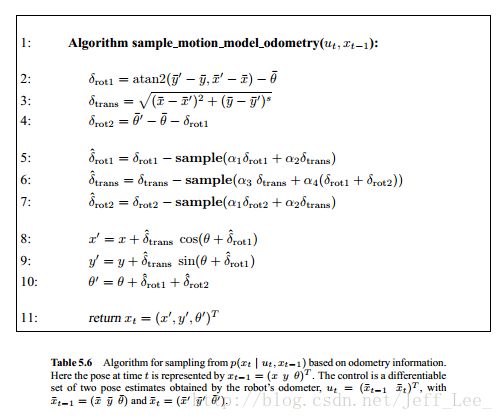
① drawFromMotion()运动模型(因为有这步,所以特别依赖里程计信息)
② scanMa
一、Gmapping是基于粒子滤波的算法。
缺点:严重依赖里程计,无法适应无人机及地面不平坦的区域,无回环(激光SLAM很难做回环检测),大的场景,粒子较多的情况下,特别消耗资源。
源码的核心函数:processScan()
算法框架:
① drawFromMotion()运动模型(因为有这步,所以特别依赖里程计信息)
② scanMa
 539
519
539
519

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















