







设置环境变量:
source /opt/ros/hydro/setup.bash
创建一个工作空间:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
2.下载usb_cam包
git clone
https://github.com/bosch-ros-pkg/usb_cam.git usb_cam
3.在catkin_ws中编译:
$mkdir build
$cd build
$cmake ..
$make
$mkdir build
$cd build
$cmake ..
$make
4.创建launch文件
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="mjpeg" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
注意像素格式,有的可能是yuyv格式,需要做相应改动。
<param name="pixel_format" value="mjpeg" />改为: <param name="pixel_format" value="yuyv" />
写launch文件时写成txt格式,最后再更改类型为launch
5.
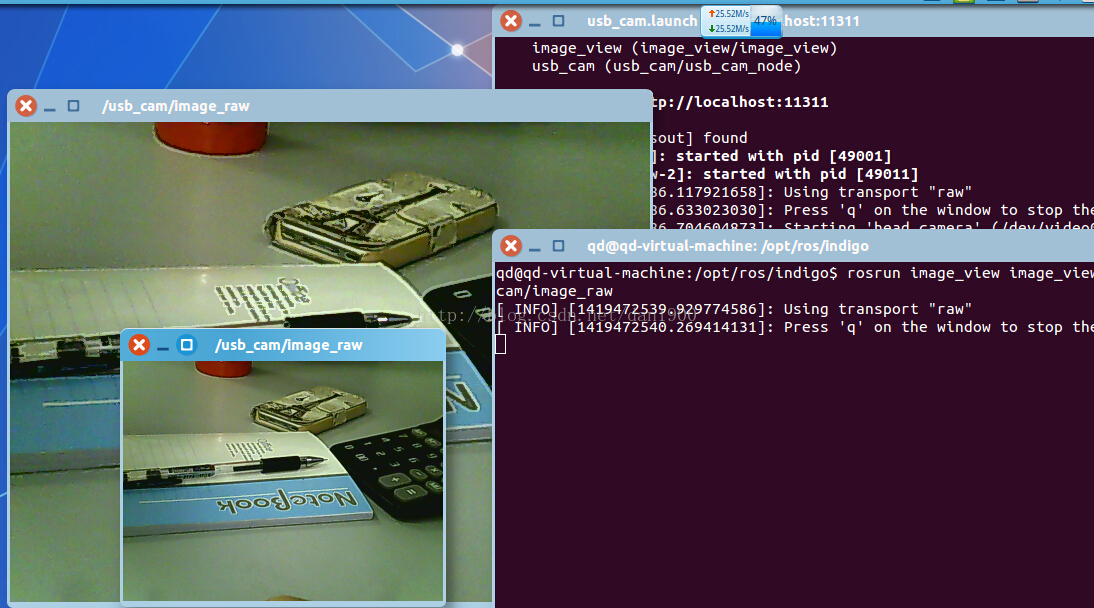
测试
qd@qd-virtual-machine:~/catkin_ws$ roslaunch usb_cam.launch
qd@qd-virtual-machine:/opt/ros/indigo$ rosrun image_view image_view image:=
/usb_cam/image_raw















 5200
5200











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









