







 本文介绍了PID控制器的调参方法,包括学院派思路和一般原则。通过比例增益P、积分时间常数Ti和微分时间常数Td的调整,确保系统稳定并减少振荡。强调了积分项可能导致的稳定性问题,并给出了具体的调参步骤和注意事项。
本文介绍了PID控制器的调参方法,包括学院派思路和一般原则。通过比例增益P、积分时间常数Ti和微分时间常数Td的调整,确保系统稳定并减少振荡。强调了积分项可能导致的稳定性问题,并给出了具体的调参步骤和注意事项。
前言
在实验或工程实践中,我们经常会用到PID控制器。其中有很多PID类型供我们选择,如一般单P控制,PI控制,PD控制,串级PID控制,模糊PID控制等等。无论选择什么类型的PID控制器,我们都会经历调参的过程。参数可以通过模拟仿真的方法得出大概,也可以通过经验凑试的方法。本文旨在整理分享PID调参的凑试技巧。
一、学院派思路
前提印象
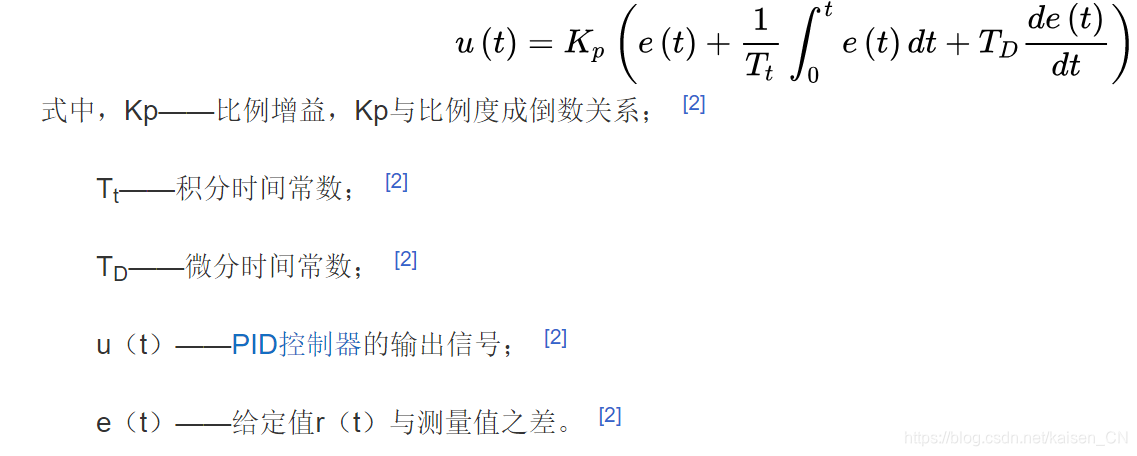
KP:比例,发挥主要作用(现在)
KI:积分,主要消除静差(过去),但会减小系统的及时性(一般有静差才引入i)
KD:微分,起抑制作用,消除过冲,让KP,KI不那么“放飞自我”(未来)
1、口诀
参数整定找最佳, 从小到大顺序查。
先是比例后积分, 最后再把微分加。
曲线振荡很频繁, 比例度盘要放大。
曲线漂浮绕大弯, 比例度盘往小扳。
曲线偏离回复慢, 积分时间往下降。
曲线波动周期长, 积分时间再加长。
曲线振荡频率快, 先把微分降下来。
动差大来波动慢, 微分时间应加长。
理想曲线两个波, 前高后低四比一。
一看二调多分析, 调节质量不会低。
2、一般原则
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。
3、一般步骤
(1)确定比例增益P
确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%—70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
(2) 确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
(3)确定微分时间常数Td
微分时间常数Td一般不用设定,为0即可。若要设定,与确定 P和Ti的方法相同,取不振荡时的30%。
4、注意
特别注意:增加I的值,四轴的定角度能力很强,拉动他比较困难,似乎像是在钉钉子一样,但是一旦有强干扰,它就会发散。这是由于积分项太大,拉动一下积分速度快,给 的补偿非常大,因此很难拉动,给人一种很稳定的错觉。
EG:
串级PID先调内环,再调外环。
二、一些思想
(摘自:《自动控制原理的故事》)
(内含“歪路子”)

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









