







1.概述
参加了一个网课,对ORBSLAM2代码边学边笔记。
代码地址:https://github.com/electech6/ORB_SLAM2_detailed_comments
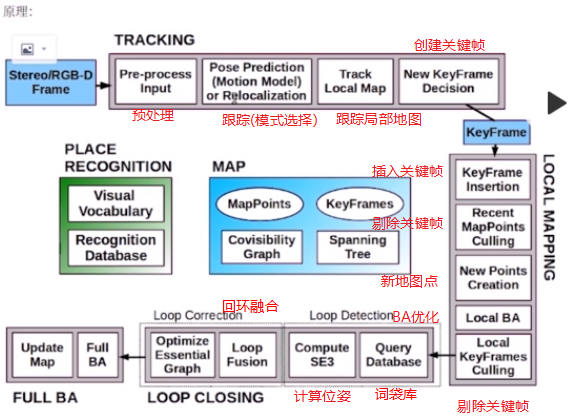
原理图
associate.py
RGBD数据集的RGB数据和D数据有一定的时间差,之间并不匹配.
associate.py是一个Python脚本,可以将相同时间戳的RGB数据和D数据结合到一起.
如何使用:
python associate.py rgb.txt depth.txt > associate.txt
python associate.py associate.txt groundtruth.txt > associate_with_groundtruth.txt
注意:python2版本下使用,如果使用python3,脚本部分代码需要调整,命令也变成python3 xxx.
ground-truth是相机在一个固定坐标系下的坐标,并不是以第一帧为参考帧.















 2063
2063











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









