







通过圆形平面的点云数据获取该平面圆心坐标及圆半径。
一、获取点云数据
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
if (pcl::io::loadPCDFile("文件路径", *cloud) < 0)
{
PCL_ERROR("\a点云文件不存在!\n");
system("pause");
return -1;
}
cout << "->加载数据点的个数:" << cloud->points.size() << endl;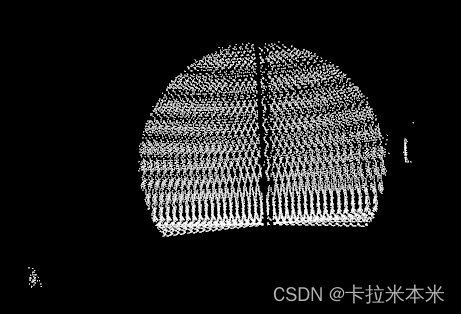
二、采用RANSAC方法定位平面
pcl::PointIndices::Ptr index_plane(new pcl::PointIndices);
pcl::SACSegmentationFromNormals<pcl::PointXYZ, pcl::Normal> sacSegmentationFromNormals;
pcl::ModelCoefficients::Ptr mdelCoefficients_plane(new pcl::ModelCoefficients);
sacSegmentationFromNormals.setInputCloud(cloud);
sacSegmentationFromNormals.setOptimizeCoefficients(true);//设置对估计的模型系数需要进行优化
sacSegmentationFromNormals.setModelType(pcl::SACMODEL_NORMAL_PLANE); //设置分割模型
sacSegmentationFromNormals.setNormalDistanceWeight(0.1);//设置表面法线权重系数
sacSegmentationFromNormals.setMethodType(pcl::SAC_RANSAC);//设置采用RANSAC作为算法的参数估计方法
sacSegmentationFromNormals.setMaxIterations(500); //设置迭代的最大次数
sacSegmentationFromNormals.setDistanceThreshold(0.03); //设置内点到模型的距离允许最大值
sacSegmentationFromNormals.setInputCloud(cloud);
sacSegmentationFromNormals.setInputNormals(normals);
sacSegmentationFromNormals.segment(*index_plane, *mdelCoefficients_plane);
std::cerr << "Plane coefficients: " << *mdelCoefficients_plane << std::endl;
pcl::ExtractIndices<pcl::PointXYZ> extractIndices;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_p(new pcl::PointCloud<pcl::PointXYZ>);
extractIndices.setInputCloud(cloud);
extractIndices.setIndices(index_plane);
extractIndices.setNegative(false);
extractIndices.filter(*cloud_p);三、把点云投影到第二步得到的平面上
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ProjectInliers<pcl::PointXYZ> proj;
proj.setModelType(pcl::SACMODEL_PLANE);
proj.setInputCloud(cloud);
proj.setModelCoefficients(mdelCoefficients_plane);
proj.filter(*cloud_projected);四、提取投影平面的轮廓
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_boundary = PointCloudBoundary2(cloud_projected);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_boundary1(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::PassThrough<pcl::PointXYZRGB> pass1; // 声明直通滤波
pass1.setInputCloud(cloud_boundary); // 传入点云数据
pass1.setFilterFieldName("z"); // 设置操作的坐标轴
pass1.setFilterLimits(0.12, 2.5); // 设置坐标范围
pass1.setNegative(false); // 保留数据函数
pass1.filter(*cloud_boundary1); // 进行滤波输出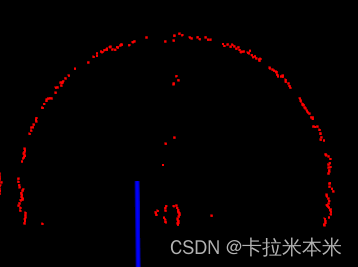
五、对轮廓进行圆形拟合,得到圆心坐标、圆的直径和圆法向量
pcl::SampleConsensusModelCircle3D<pcl::PointXYZRGB>::Ptr model_circle3D(new pcl::SampleConsensusModelCircle3D<pcl::PointXYZRGB>(cloud_boundary1));
pcl::RandomSampleConsensus<pcl::PointXYZRGB> ransac(model_circle3D);
ransac.setDistanceThreshold(0.05); // 距离阈值,与模型距离小于0.05的点作为内点
ransac.setMaxIterations(500); // 最大迭代次数
ransac.computeModel(); // 拟合3D圆
pcl::IndicesPtr inliers(new vector <int>());// 存储内点索引的向量
ransac.getInliers(*inliers); // 提取内点对应的索引
pcl::PointCloud<pcl::PointXYZ>::Ptr circle_3D(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud<pcl::PointXYZRGB>(*cloud_boundary1, *inliers, *circle_3D);
cout << "->圆上数据点的个数:" << circle_3D->points.size() << endl;
Eigen::VectorXf coeff;
ransac.getModelCoefficients(coeff);
cout << "圆心的x坐标:" << coeff[0] << "\n"
<< "圆心的y坐标:" << coeff[1] << "\n"
<< "圆心的z坐标:" << coeff[2] << "\n"
<< "圆的半径:" << coeff[3] << "\n"
<< "圆法向量:" << coeff[4] << ","
<< coeff[5] << ","
<< coeff[6] << endl;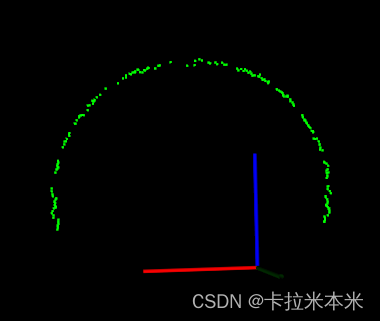















 1349
1349

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









