







订阅说明:如果要订阅,先看链接内容 看链接内容 看链接内容:订阅先看此内容
- 文章目录:3D视觉个人入门学习路线
写在前面的话:仅实现论文中第一部分的边缘检测,在复现第二部分的时候发现效率极低,第二部分复现的效果不太好,因此未继续(主要还是用在工业中效率不高);
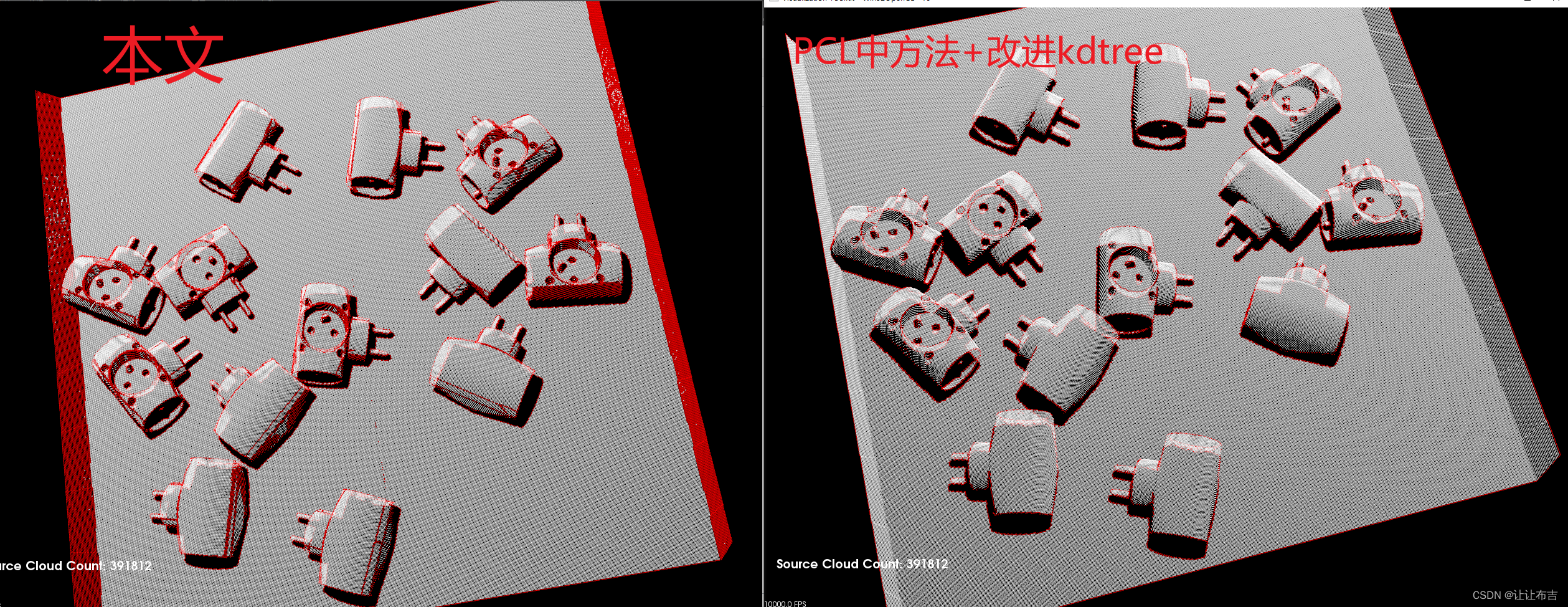
1. 效果
2. 论文内容概述
2.1 第一部分整体思路
 本文复现内容主要是基于上述图示内容(红色框中的内容复现出来的效率极差,且效果不好,因此仅记录红框外的内容)。
本文复现内容主要是基于上述图示内容(红色框中的内容复现出来的效率极差,且效果不好,因此仅记录红框外的内容)。
对于该部分内容,可简单总结如下:
- 给
订阅说明:如果要订阅,先看链接内容 看链接内容 看链接内容:订阅先看此内容
写在前面的话:仅实现论文中第一部分的边缘检测,在复现第二部分的时候发现效率极低,第二部分复现的效果不太好,因此未继续(主要还是用在工业中效率不高);
本文复现内容主要是基于上述图示内容(红色框中的内容复现出来的效率极差,且效果不好,因此仅记录红框外的内容)。
对于该部分内容,可简单总结如下:
 565
190
3万+
512
565
190
3万+
512











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文























