







在我们做机器人项目的时候,不可避免的要和总线舵机打交道,今天就介绍怎么去测试总线舵机。
前言
驱动舵机之前需要先去安装pigpio库和配置串口
一、安装pigpio库
二、配置串口
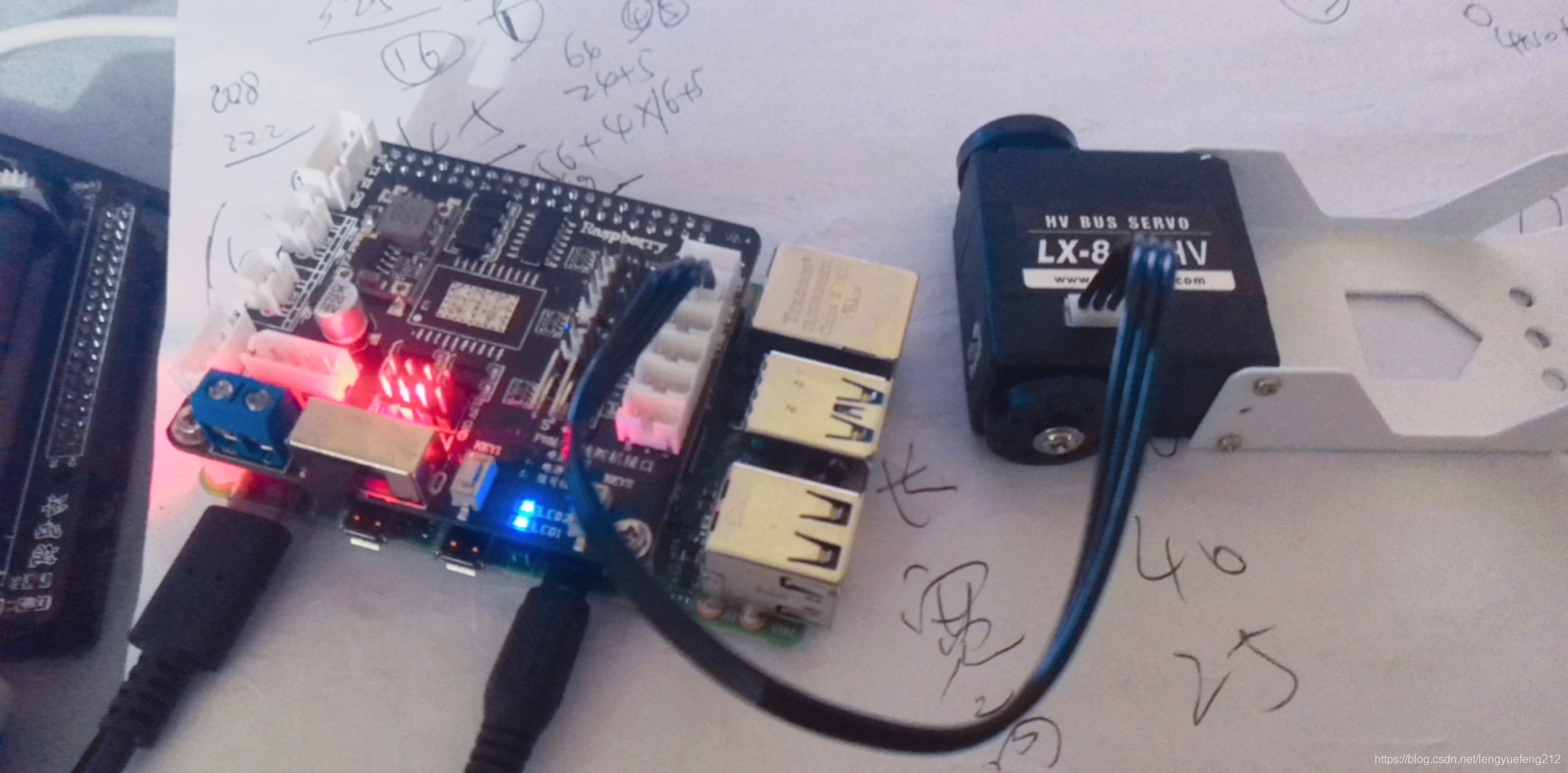
一、硬件连接
二、编写程序
#!/usr/bin/python3
import serial
import pigpio
import time
pi = pigpio.pi() #初始化 pigpio库
serialHandle = serial.Serial("/dev/ttyAMA0", 115200) #初始化串口, 波特率为115200
##
##命令发送
##
def servoWriteCmd(id, cmd, par1 = None, par2 = None):
buf = bytearray(b'\x55\x55')
try:
len = 3 #若命令是没有参数的话数据长度就是3
buf1 = bytearray(b'')
## 对参数进行处理
if par1 is not None:
len += 2 #数据长度加2
buf1.extend([(0xff & par1), (0xff & (par1 >> 8))]) #分低8位 高8位 放入缓存
if par2 is not None:
len += 2
buf1.extend([(0xff & par2), (0xff & (par2 >> 8))]) #分低8位 高8位 放入缓存
buf.extend([(0xff & id), (0xff & len), (0xff & cmd)])
buf.extend(buf1) #追加参数
##计算校验和
sum = 0x00
for b in buf: #求和
sum += b
sum = sum - 0x55 - 0x55 #去掉命令开头的两个 0x55
sum = ~sum #取反
buf.append(0xff & sum) #取低8位追加进缓存
serialHandle.write(buf) #发送
except Exception as e:
print(e)
def portInit(): #配置用到的IO口
pi.set_mode(17, pigpio.OUTPUT) #配置RX_CON 即 GPIO17 为输出
pi.write(17, 0)
pi.set_mode(27, pigpio.OUTPUT) #配置TX_CON 即 GPIO27 为输出
pi.write(27, 1)
def portWrite(): #配置单线串口为输出
pi.write(27, 1) #拉高TX_CON 即 GPIO27
pi.write(17, 0) #拉低RX_CON 即 GPIO17
def portRead(): #配置单线串口为输入
pi.write(27, 0) #拉低TX_CON 即 GPIO27
pi.write(17, 1) #拉高RX_CON 即 GPIO17
portInit()
while True:
try:
portWrite() #将单线串口配置为输出
servoWriteCmd(1,1,0,1000) #发送命令 参数1 舵机id=1, 参数2 命令 = 1, 参数3 位置 = 0, 参数4 时间 = 1000ms
time.sleep(1.1)
servoWriteCmd(1,1,1000,2000)
time.sleep(2.1)
except Exception as e:
print(e)
break
需要修改为对应的舵机的ID,这里使用的是1,舵机出厂默认是1
三、测试
直接在树莓派运行这个程序,发现舵机会转动

测试成功。















 2590
2590











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









