







ros教程:创建程序包
前言
ros教程:创建程序包
根据前篇教程已经创建好了工作空间,并已经成功生效了环境变量,接下来创建一个功能包
一、创建功能包
功能包的名字根据我们这个功能包的作用来命名。比如我现在的功能包是用来学习ROS的C++编程,那么我的功能包名称就叫做learning_cplus。
打开终端,输入下面指令。
cd catkin_ws/src
catkin_create_pkg learning_cplus roscpp rospy std_msgs
我们通过cd指令切换当前路径到src文件夹下,在该路径下使用catkin_create_pkg指令 来创建一个功能包。
格式如下:catkin_create_pkg 功能包名称 依赖项1 依赖项2 ......
依赖项是你的这个功能包依赖于哪些功能模块,比如该功能包,就导入了C++、Python和std_msgs(后面会有详细介绍)。
然后返回到catkin_ws目录下进行编译。


我们可以看到learning_cplus功能包在catkin_ws工作空间编译成功,我们生效一下环 境变量,通过roscd learning_cplus指令即可进入该功能包。
目前我们的learning_cplus下有include(头文件)和src(源文件)两个文件夹,还有CMakelist.txt编译配置文件和package.xml功能包列表文件。
到这里,我们的learning_cplus功能包创建结束。
二、创建节点
先进入learning_cplus功能包内,进入src文件夹内,创建一个发布节点。
roscd learning_cplus
cd src
touch publisher.cpp
发布节点publisher.cpp内容如下。这里建议大家自行修改内容。
#include "ros/ros.h" //导入ROS系统包含核心公共头文件
#include "std_msgs/String.h" //导入std_msgs/String消息头文件,这个是由std_m sgs包的string.msg文件自动生成。
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker"); //初始化ROS,指定节点名称为“talker”,节点 名称要保持唯一性。名称定义参考
ros::NodeHandle n; //实例化节点
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); //发布一个消息类型为std_msgs/String,命名为chatter的话题。
//定义消息队列大小为1000,即超过1000条消息之后,旧的消息就会丢弃。
ros::Rate loop_rate(10); //指定发布消息的频率,这里指10Hz,也即每秒10次
//通过 Rate::sleep()来处理睡眠的时间来控制对应的发布频率。
int count = 0;
while (ros::ok())
{
/*
默认roscpp会植入一个SIGINT处理机制,当按下Ctrl‐C,就会让ros::ok()返回false, 那循环就会结束。
ros::ok() 返回false的几种情况:
SIGINT收到(Ctrl‐C)信号
另一个同名节点启动,会先中止之前的同名节点
ros::shutdown()被调用
所有的ros::NodeHandles被销毁
*/
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
//实例化消息msg, 定义字符串流“hello world”并赋值给ss, 最后转成为字符串赋值给 msg.data
ROS_INFO("%s", msg.data.c_str()); //输出调试信息
chatter_pub.publish(msg); //发布msg
ros::spinOnce();
//不是必需的,但是保持增加这个调用,是好习惯
//如果程序里也有订阅话题,就必需,否则回调函数不能起作用
loop_rate.sleep();
//根据之前ros::Rate loop_rate(10)的定义来控制发布话题的频率。定义10即为每秒1 0次
++count;
}
return 0;
}
发布节点的功能就是发布hello world并跟一个计数。发布节点的名称叫做talker,发布 的话题名称叫做chatter,发布的内容是hello world + 计数。逻辑很清晰,就是从main函数,从上往下的执行,只要Master节点管理器不死,就会移植发布。
有了发布节点,那么接下来我们需要做一个订阅节点来接收这些数据。我们订阅节点由 listener.cpp实现。
roscd learning_cplus
cd src
touch listener.cpp
订阅节点publisher.cpp内容如下。这里建议大家自行修改内容。
#include "ros/ros.h" //导入ROS系统包含核心公共头文件
#include "std_msgs/String.h" //导入std_msgs/String消息头文件,这个是由std_m sgs包的string.msg文件自动生成。
/*
定义回调函数chatterCallback,当收到chatter话题的消息就会调用这个函数。
消息通过boost shared_ptr(共享指针)来传递。
但收到消息,通过ROS_INFO函数显示到终端
*/
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg‐>data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener"); //初始化ROS,指定节点名称为“listener”
ros::NodeHandle n; //实例化节点
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
/*
定义订阅节点,名称为chatter,指定回调函数chatterCallback
但收到消息,则调用函数chatterCallback来处理。
参数1000,定义队列大小,如果处理不够快,超过1000,则丢弃旧的消息
*/
ros::spin(); //调用此函数才真正开始进入循环处理,直到 ros::ok()返回false才停 止。
return 0;
}
订阅节点是检测到有chatter内容,需要去打印出来这个内容。由于是监听的,所以需要使用类似中断的方式,也就是信号回调来实现。
还是老样子。初始化、实例化,然后检测chatter话题,如果有,跳到chatterCallBack 执行,没有就一直循环。
三、修改CMakeList.txt
我们的发布节点和订阅节点都已经写好,那么接下来就需要写CMakeList.txt。 首先是find_package依赖项,修改如下。:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
调用生成的消息修改如下。
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
个人编译输出配置修改如下。
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent project s also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects a lso need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES learning_cplus
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
接着,在Build位置添加 如下内容。
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(publisher src/publisher.cpp)
target_link_libraries(publisher ${catkin_LIBRARIES})
add_dependencies(publisher learning_cplus_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener learning_cplus_generate_messages_cpp)
四、配置package.xml文件
配置内容很少,直接贴出package.xml代码。
<?xml version="1.0"?>
<package format="2">
<name>learning_cplus</name>
<version>0.0.0</version>
<description>这是学习ROS C++编程的功能包</description>
<maintainer email="xxxxx@xx.com">Leslie___Cheung_csdn</maintainer>
<license>TODO</license>
<author email="xxxxx@xx.com">Leslie___Cheung_csdn</author>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_depend>message_generation</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<exec_depend>message_runtime</exec_depend>
<export>
</export>
</package>
五、编译并执行
1.编译
打开一个终端,进入catkin_ws路径,执行catkin_make进行编译。如果没写错的话,看到的应该是这样的。

编译成功记得重新source一下,不然可能找不到这个功能包。
source 一下工程路径下devel内的setup.bash文件
source ~/catkin_ws/devel/setup.bash
2.执行
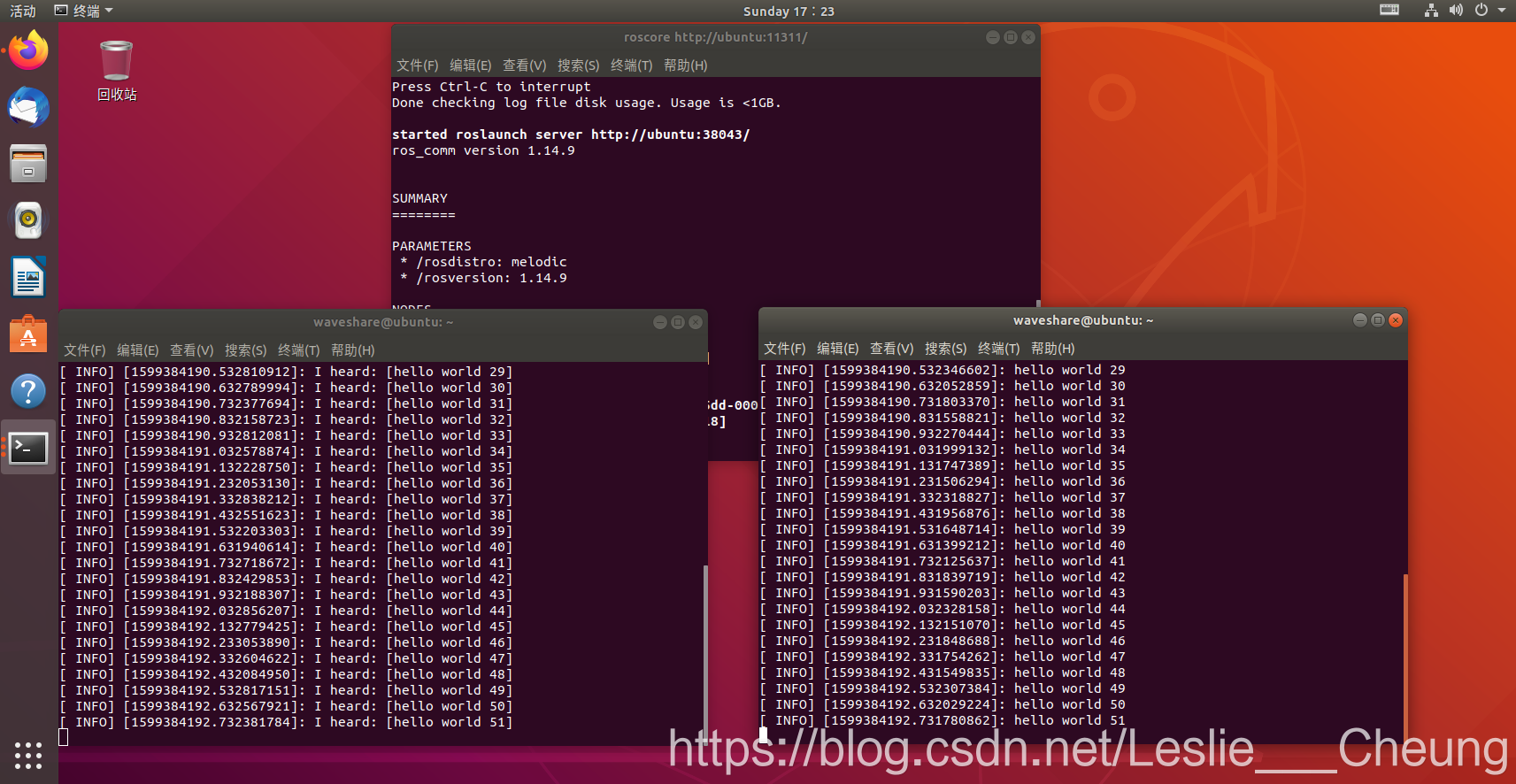
先启动一个ROS Master节点管理器,然后分别启动listener订阅节点和publisher发布节点,在这里需要启动三个终端。
启动ROS Master节点管理器。
roscore
启动listener订阅节点。
rosrun learning_cplus listener
启动publisher发布节点。
rosrun learning_cplus publisher
这样看着不够直观,启动一下节点关系图,它是这样的。
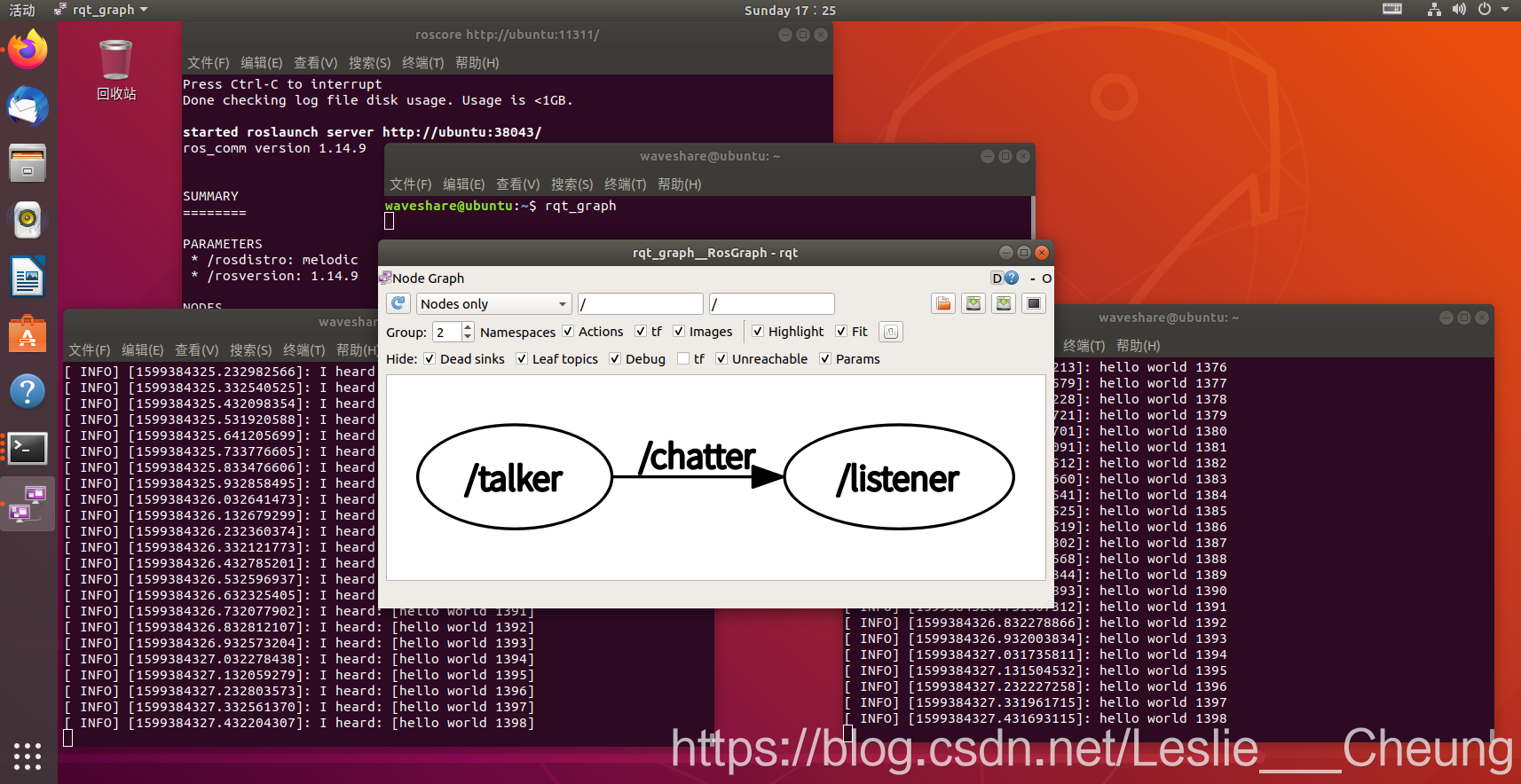
可以看到,talker节点给lisrener节点发了一个chatter。但是应该是publisher给,这里怎么成talker了呢?不要急,先去看一下publisher.cpp的代码,原来是我们初始化的节点叫做talker,并不是BUG~~~
到这里就结束了吗?并没有,接下来给大家介绍一些ROS的小工具,比如上面的rqt_graph就是来查看当前各个节点通讯关系的。
六、rostopic工具
拿到了一个别人的ROS功能包只能用却无法和自己的对接数据?没关系,运行一下它的功能包,开一个rqt_graph,一目了然。
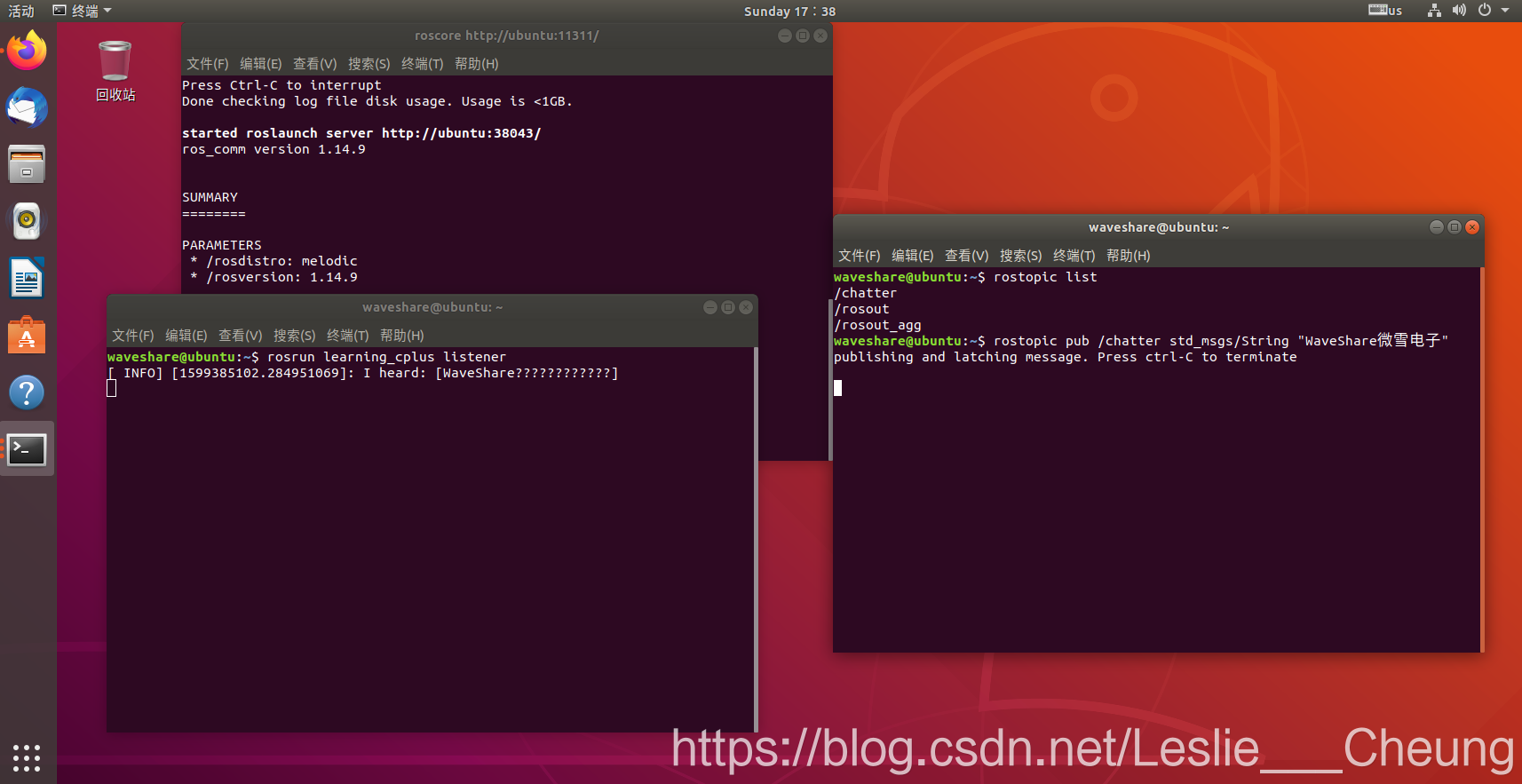
咳咳,重点来了,接下来我要说的小工具是rostopic。
rostopic list:查看当前话题都有哪些。
rostopic echo 话题名:查看该话题的数据。
rostopic pub 话题名 功能包数据:发布指定内容到指定话题。

总结(最重要的)















 583
583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









