







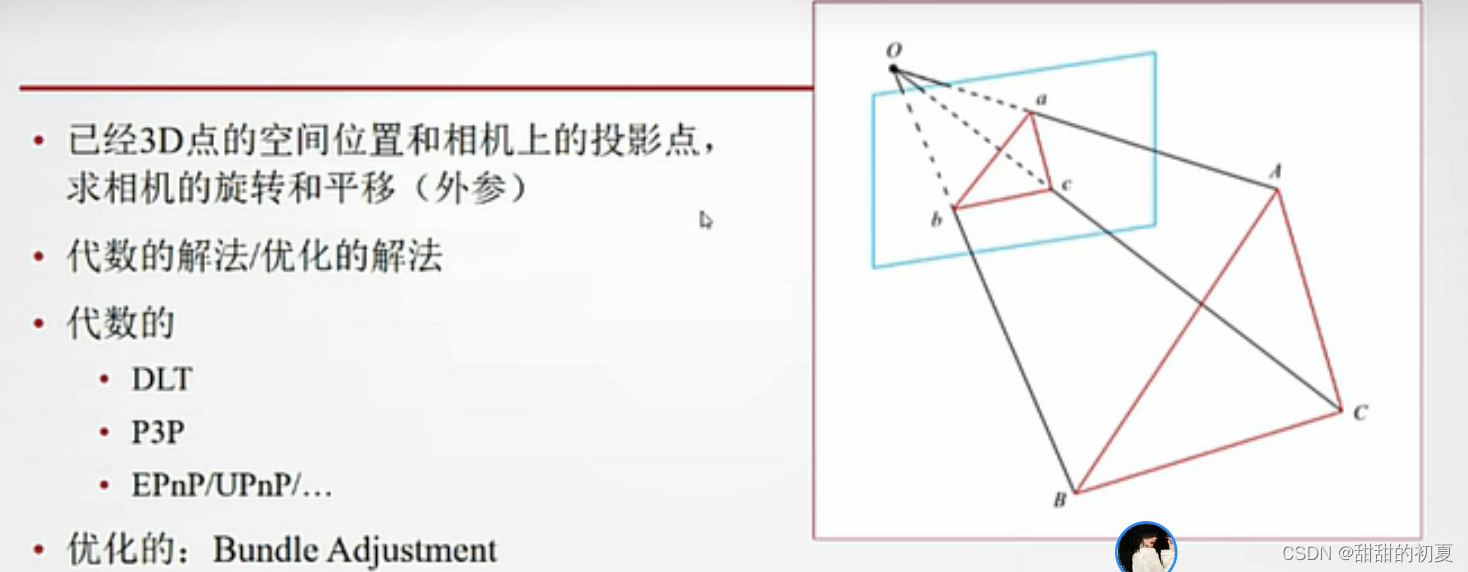
当运动连续的时候,用优化的方法,因为线性代数的方法能解,不过对于噪声不够鲁棒
当对解完全不知道的情况下,可以用代数的方法,如果知道解的大致样子,可以给一个初始值,通过迭代的方式求解。
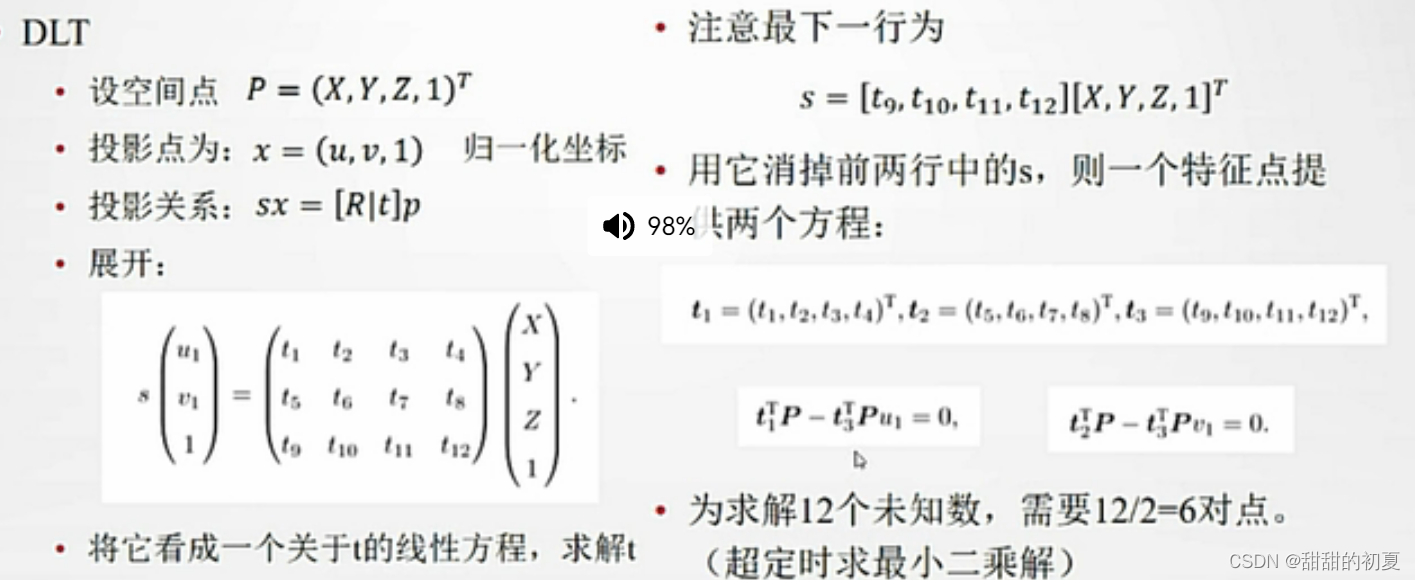
s为距离因子*x=世界坐标到相机坐标的变换
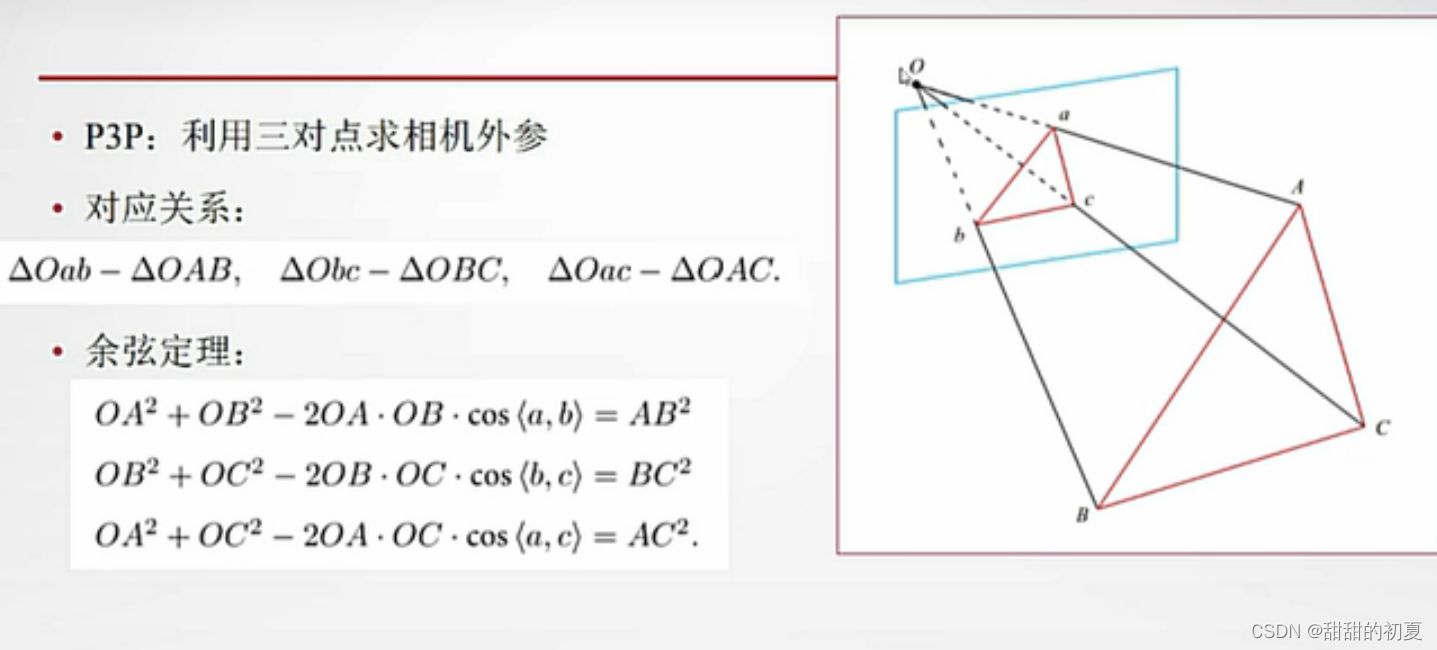 3D空间三个点ABC,在2D空间(相机上面)的投影abc ,计算相机到世界坐标的旋转和平移
3D空间三个点ABC,在2D空间(相机上面)的投影abc ,计算相机到世界坐标的旋转和平移
已知ABC在世界坐标系下的点坐标,abc在相机坐标系下的坐标,不知道ABC在相机坐标系下的点坐标
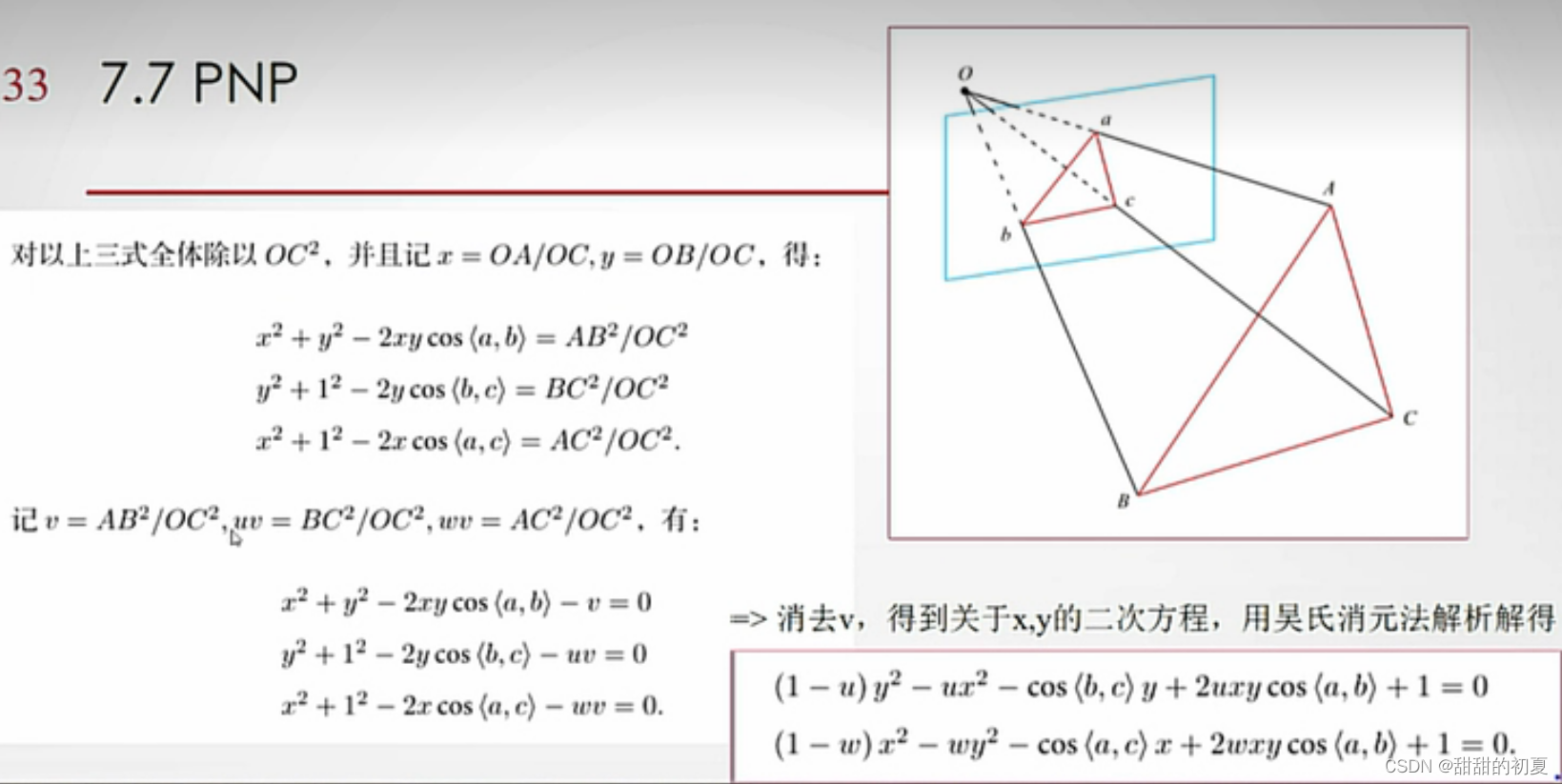
u=BC^2/AB^2,和w已知,v不知道
方程解得xy后
当运动连续的时候,用优化的方法,因为线性代数的方法能解,不过对于噪声不够鲁棒
当对解完全不知道的情况下,可以用代数的方法,如果知道解的大致样子,可以给一个初始值,通过迭代的方式求解。
s为距离因子*x=世界坐标到相机坐标的变换
3D空间三个点ABC,在2D空间(相机上面)的投影abc ,计算相机到世界坐标的旋转和平移
已知ABC在世界坐标系下的点坐标,abc在相机坐标系下的坐标,不知道ABC在相机坐标系下的点坐标
u=BC^2/AB^2,和w已知,v不知道
方程解得xy后
 4970
4970











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















