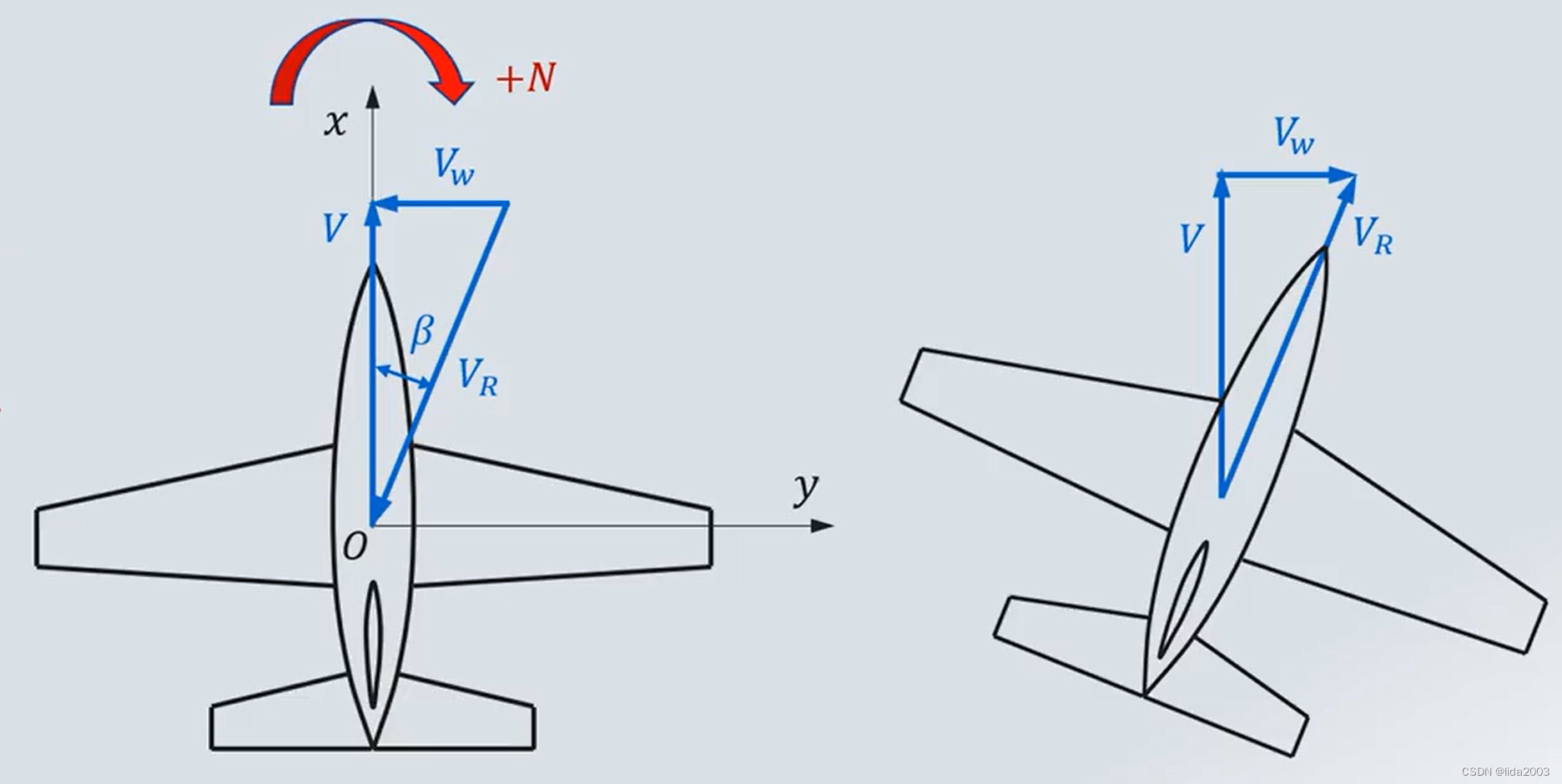
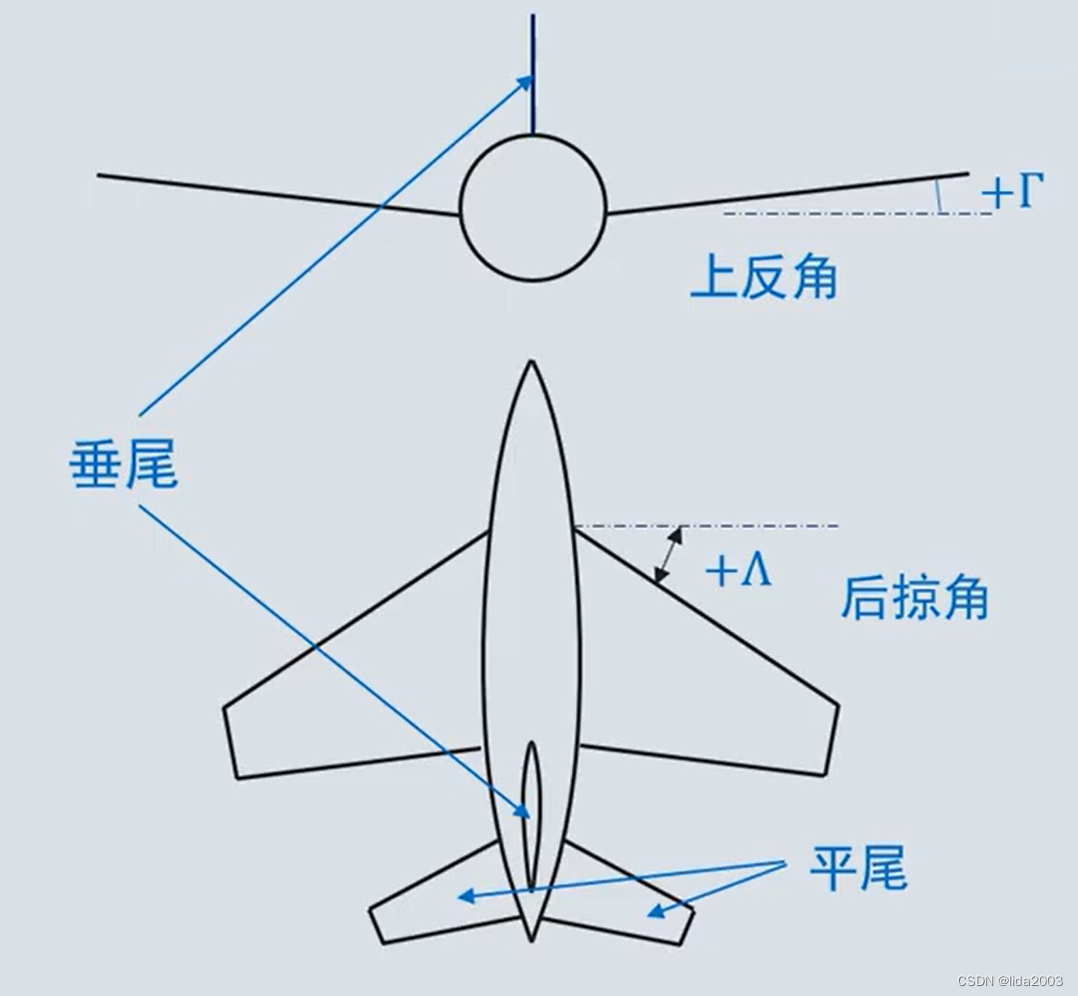
飞行动力学 - 第17节-航向静稳定性 之 基础点摘要 1. 航向静稳定性2. 航向静稳定性的组成3. 参考资料 1. 航向静稳定性 飞机受到侧滑扰动后,如果能产生使机头指向原来方向的力矩,抵消侧滑,则称为航向静稳定性。 2. 航向静稳定性的组成 飞机的航向静稳定性等于各独立不见的贡献和。 机翼 上反角 g a m m a gamma gamma 后掠角 l a m d a lamda lamda 机身尾翼 平尾 垂尾 推进系统 直接影响 间接影响 3. 参考资料 飞行动力学-第17节-航向静稳定性


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 518
8336
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
518
8336
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






