










Open FPV VTX开源之inav配置
1. 源由
飞控嵌入式OSD - ardupilot配置使用inav配套OSD图片。
──> /usr/share/fonts/
├──> font_inav.png
├──> font_inav_hd.png
好多同学,因为这个没有配置导致满屏ICON/OSD数字不变化等等问题。所以请确认当前摄像头不是工作在MAVLink协议,而是处于msposd配置下,确保OpenIPC摄像头嵌入式OSD配置好。
注:想详细了解细节内容,请参考:Open FPV VTX开源之嵌入式OSD配置

2. 配置
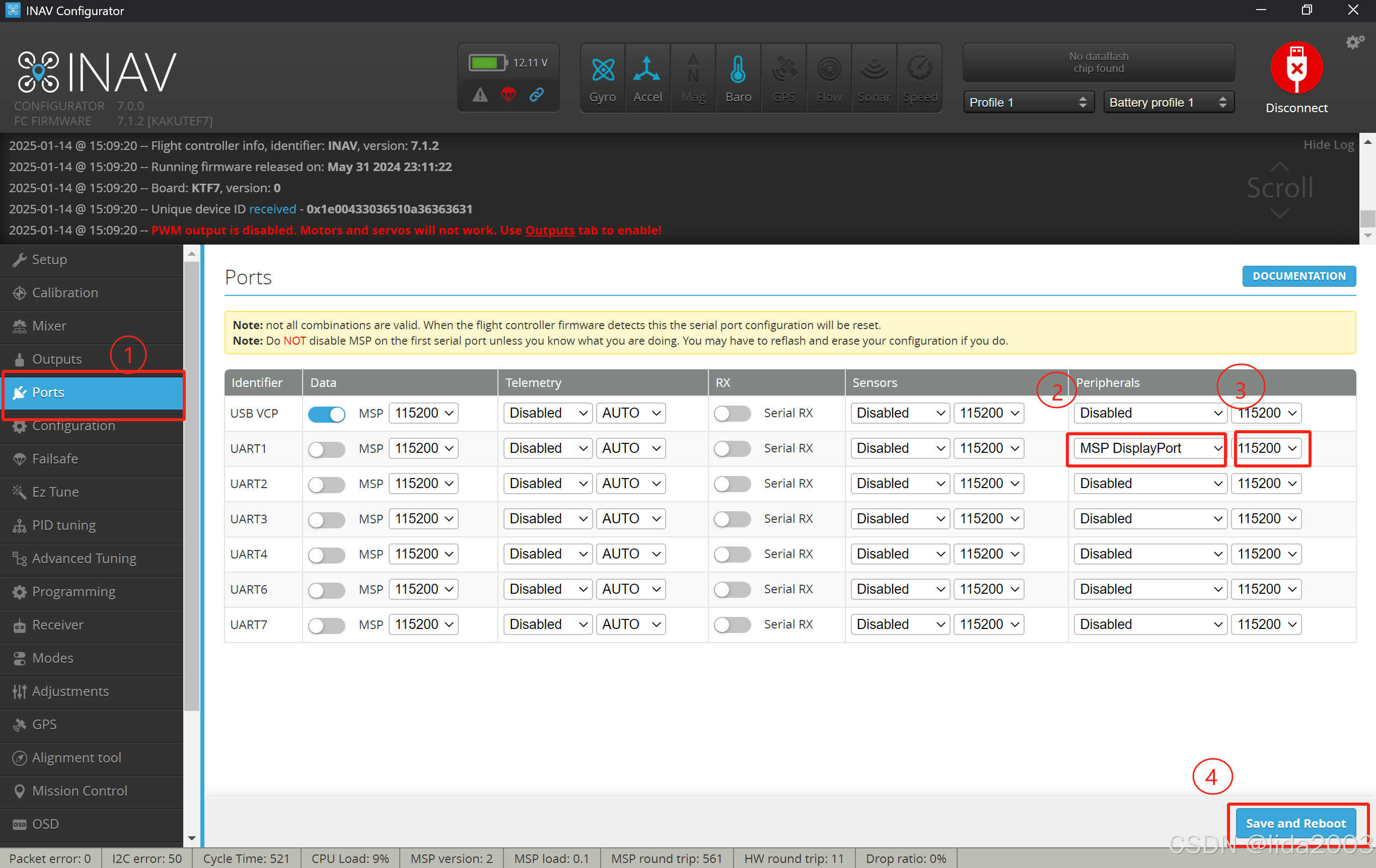
- 步骤一:配置MSP端口
- 选择【Ports】页面
- 配置图传协议:【MSP DisplayPort】
- 配置串口波特率:【115200】波特率
- 保存/重启使能配置
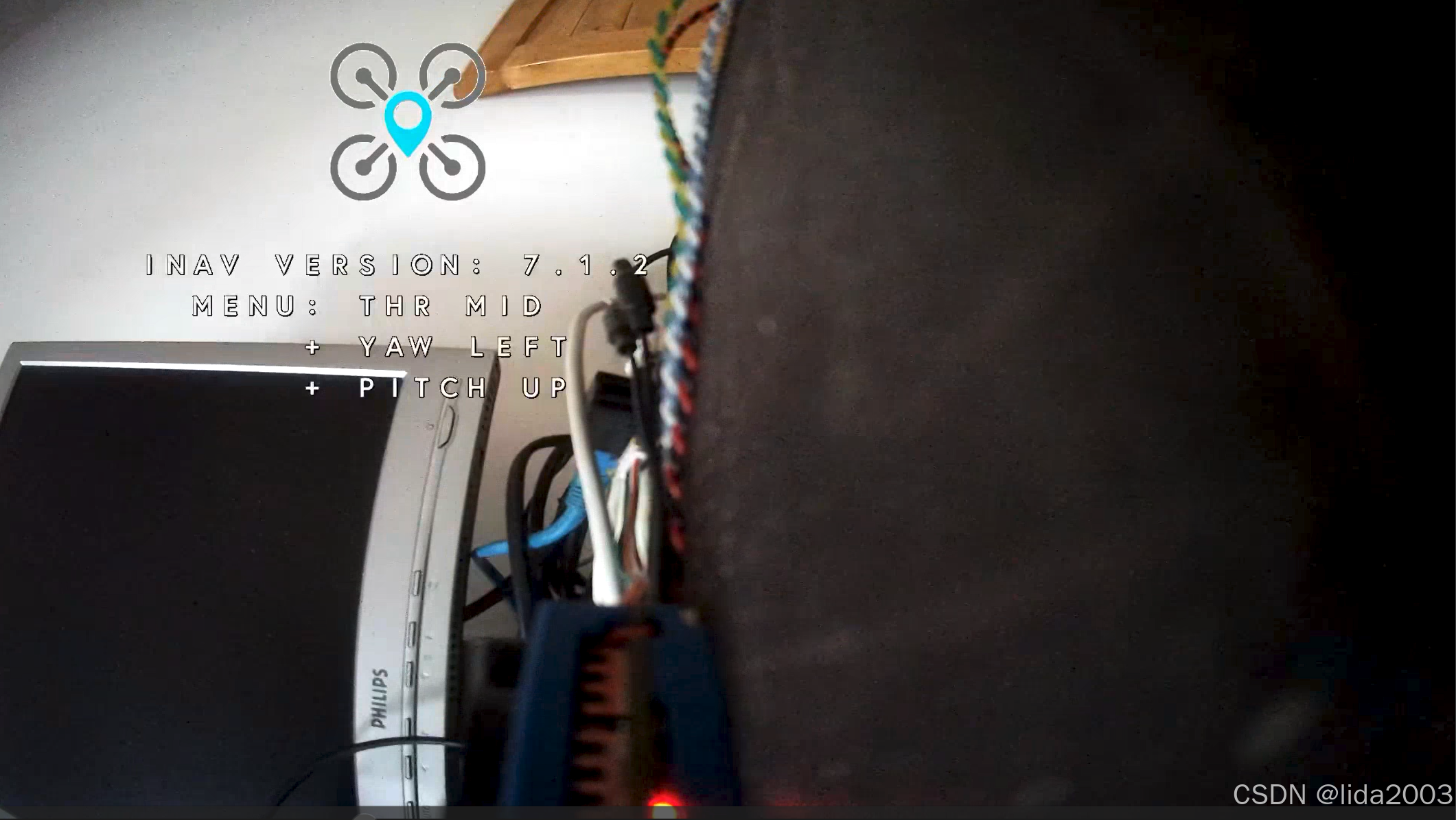
- 步骤二:确认端口配置成功
注:重启飞控,msposd将迅速辨识OSD,并显示inav启动界面。
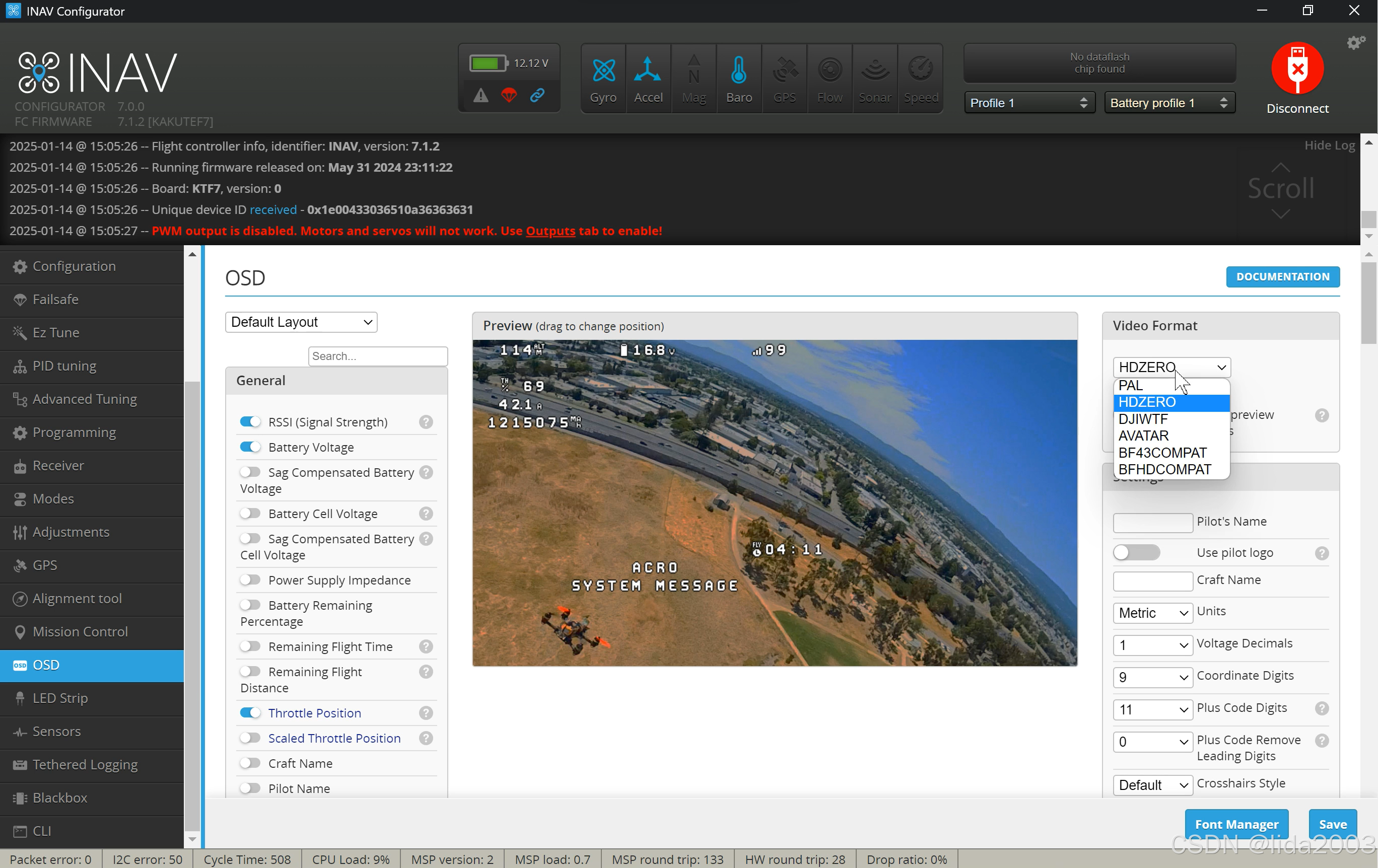
- 步骤三:inav地面站配置OSD
- 选择需要使用的OSD图标以及
VIDEO format - 将OSD移动到需要显示的相应为止,并实时观察是否越界,调整到合适的位置
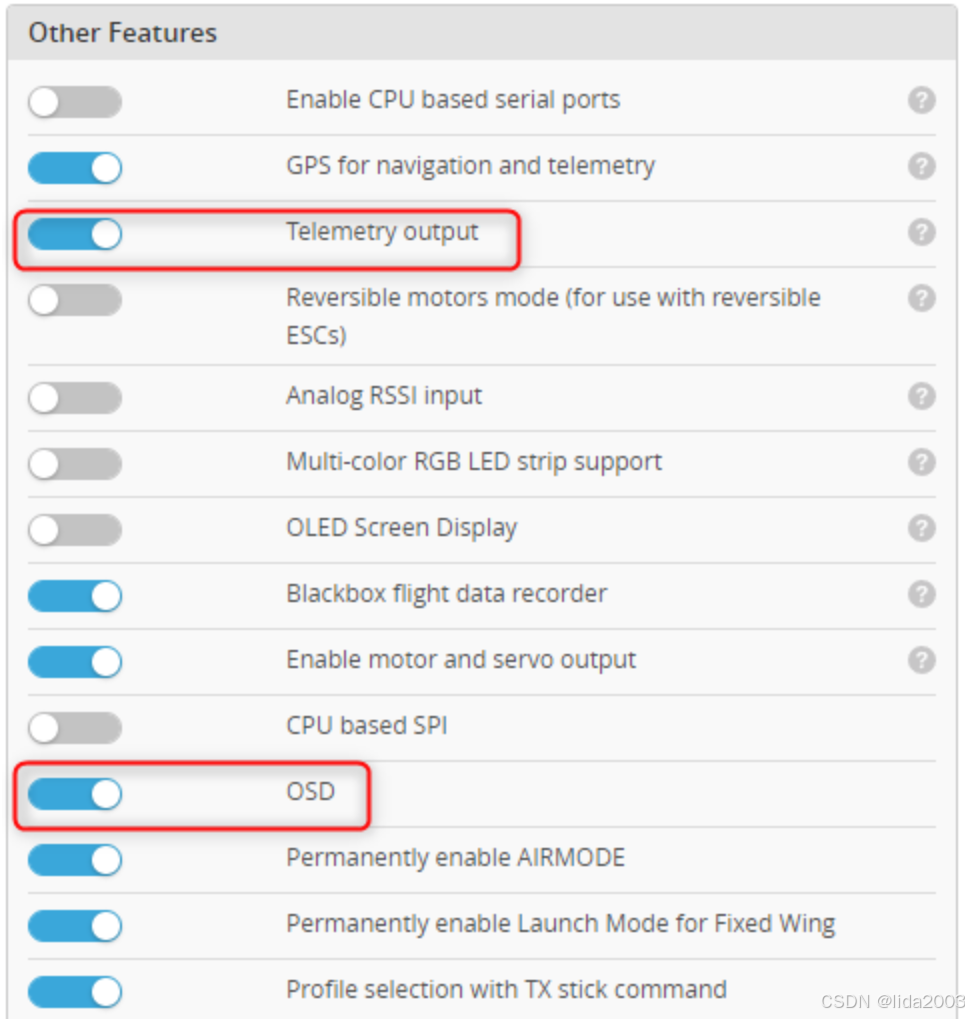
- 在【Configuration】页面配置
OSD和Telemetry - 保存OSD配置信息
- 步骤四:确认OSD配置成功
注:因为飞控并没有完全配置,所以部分ICON没有正确显示,比如:飞行模式

3. 总结
有图有真相,我们有视频有真相!
OpenIPC-MSPOSD inav Configuration
4. 参考资料
【1】Open FPV VTX开源之硬件规格及组成
【2】Open FPV VTX开源之第一次出图
【3】Open FPV VTX开源之默认MAVLink设置
【4】Open FPV VTX开源之嵌入式OSD配置
【5】Open FPV VTX开源之ardupilot配置
【6】Open FPV VTX开源之betaflight配置
【7】Open FPV VTX开源之图像化配置工具
5. 补充 - 飞控固件版本
# version
# INAV/KAKUTEF7 7.1.2 May 31 2024 / 23:11:22 (4e1e59eb)
# GCC-10.3.1 20210824 (release)

















 4224
4224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









