








 超级会员免费看
超级会员免费看

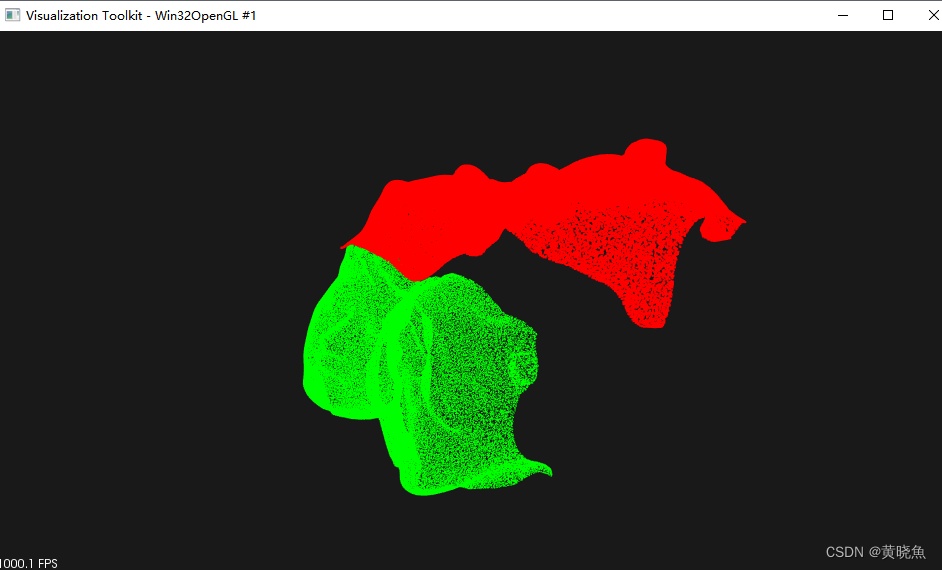
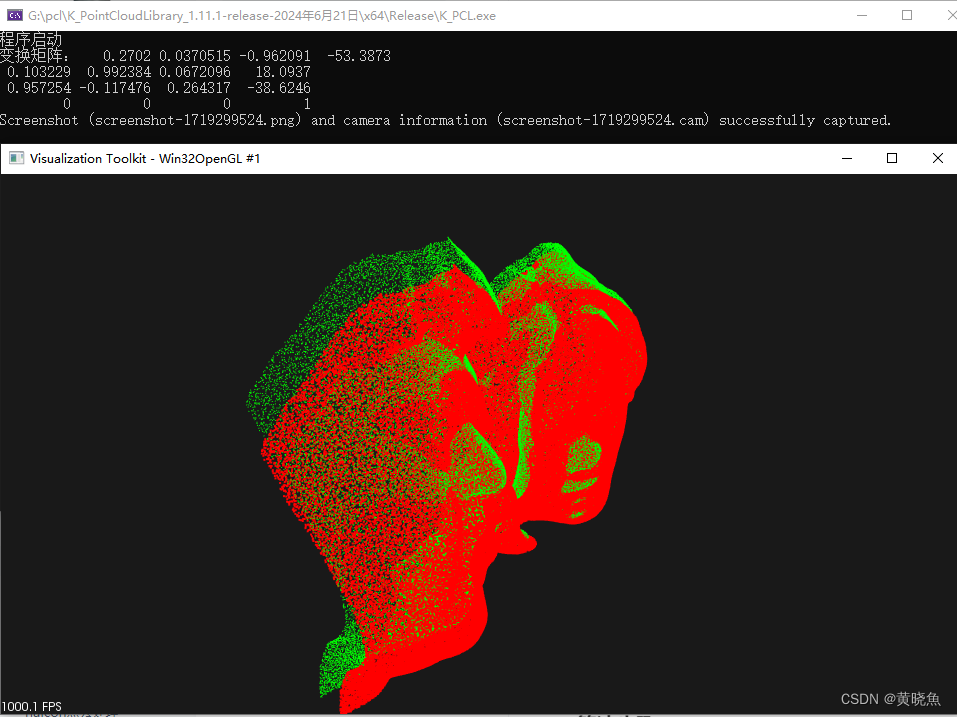
测试效果
原始点云
粗配准之后的点云
算法简介
4PCS(Four-Points Congruent Sets)算法是一种用于实现点云粗配准的有效方法,特别适用于重叠区域较小或重叠区域发生较大变化的场景。以下是关于4PCS算法实现点云粗配准过程的详细解释:
1. 算法原理
4PCS算法基于RANSAC(Random Sample Consensus)算法框架,通过构建与匹配全等四点对的方式来减少空间匹配运算,进而加速配准过程。它利用仿射不变性约束,在共面四点集合中匹配符合条件的对应点对,并使用LCP(Largest Common Pointset)策略寻找配准后最大重叠度四点对,得到最优匹配结果。
2. 算法步骤
- 初始化:
-
- 输入两个处于任意初始位置的点集P和Q。
- 设定参数,如近似重叠度、配准后对应点之间的距离阈值、采样点数量等。
- 共面四点集合构建:
-
- 在基准点云P中寻找满足要求的长基线共面四点基B={a,b,c,d}。

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 6373
6373











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











