







大家好,欢迎大家关注我的知乎专栏- 慢慢悠悠小马车。
原文《Automatic Waypoint Generation to Improve Robot Navigation Through Narrow Spaces》。
一、摘要与简介
本文以家庭\室内服务机器人为研究对象,为增强其通过窄区域的能力,提出了一种在线的局部路径调整方法,主要分为2步:
- 沿全局路径方向自动探测过窄难以通过的区域
- 然后根据环境特征生成辅助点,作为引导机器人通过的路径点。
方法的优势在于计算快速、通用性强,可以大幅提高机器人通过窄通道、窄门、拐弯等复杂困难区域。
窄区域难以通过,主要原因是传感器的观测噪声、标定误差、定位误差、轨迹跟踪误差等。已有的方法很多建立在对门、走廊通道等特征的主动识别上,然后制定合适的策略通过,泛化能力较差,无法在复杂多样的家居环境中通用。

如图1,本方法是建立在全局路径规划成功的基础上,当局部路径规划失败时,开启窄区域检测和辅助点生成,调整局部路径的部分路径点,一般不会也不必更改全局路径。若有必要,当通过窄区域后,可进行全局重规划。
本文中有2个重要概念:
- critical navigation point,CNP,关键导航路径点,可以简单的认为1个窄区域对应1个CNP。
- auxiliary navigation point,ANPs,辅助导航路径点,1个CNP会衍生出2个ANP。
初始生成的1个CNP和2个ANP是沿着全局路径、靠近窄区域中心通道、共线的关系。之后再根据环境特征、上下文等微调位置。机器人跟踪这3个点,就可以无碰平滑的通过窄区域。
二、核心算法
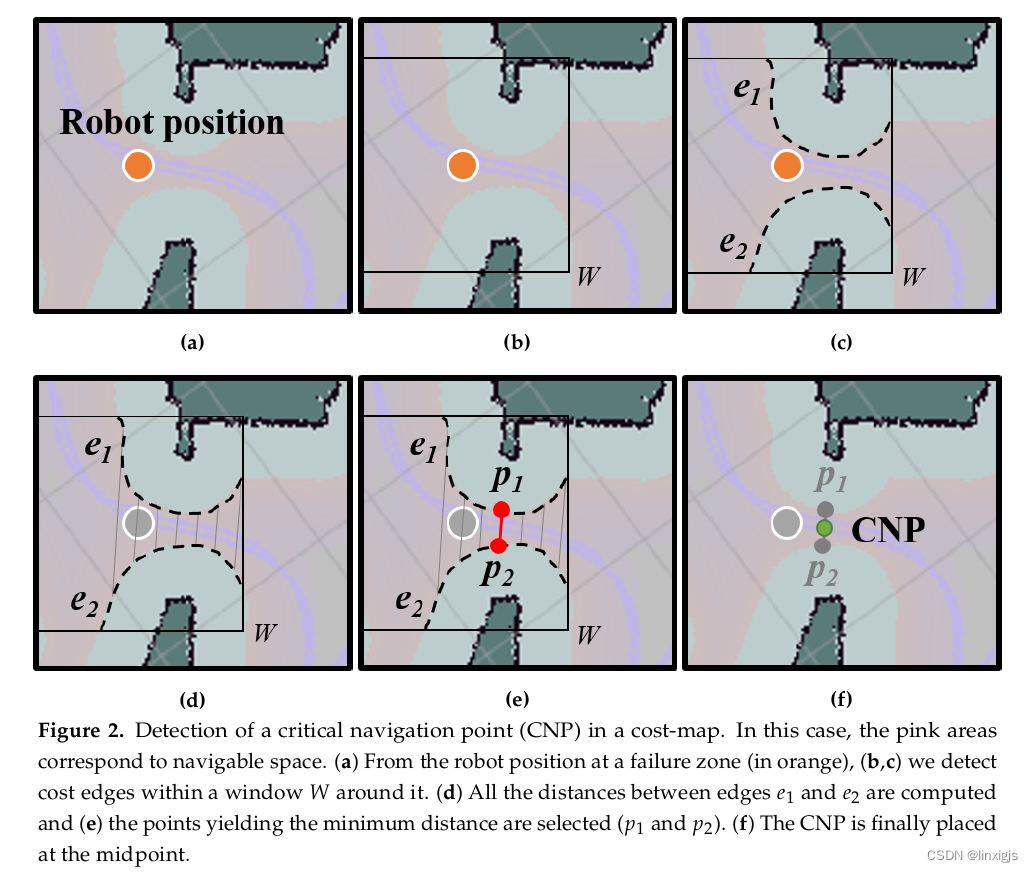
3.1 窄区域检测,即CNP的生成

如算法1和图2,算法输入是
- 机器人位姿
- 代价地图
- 预设的窗口大小
算法输出1个CNP。
算法步骤:
- 根据机器人位姿和窗口大小,在安全膨胀后的代价地图中限定考察的窗口区域;
- 提取窗口中的边,即障碍物占据区域和可通行区域的交界线;
- 双层for循环遍历这些边,寻找具有最近欧式距离的1对点,这对点的中点就是CNP。
因为考察窗口足够小,该算法会非常快,且没有必要做严格的计算过程优化。
3.2 ANPs的生成
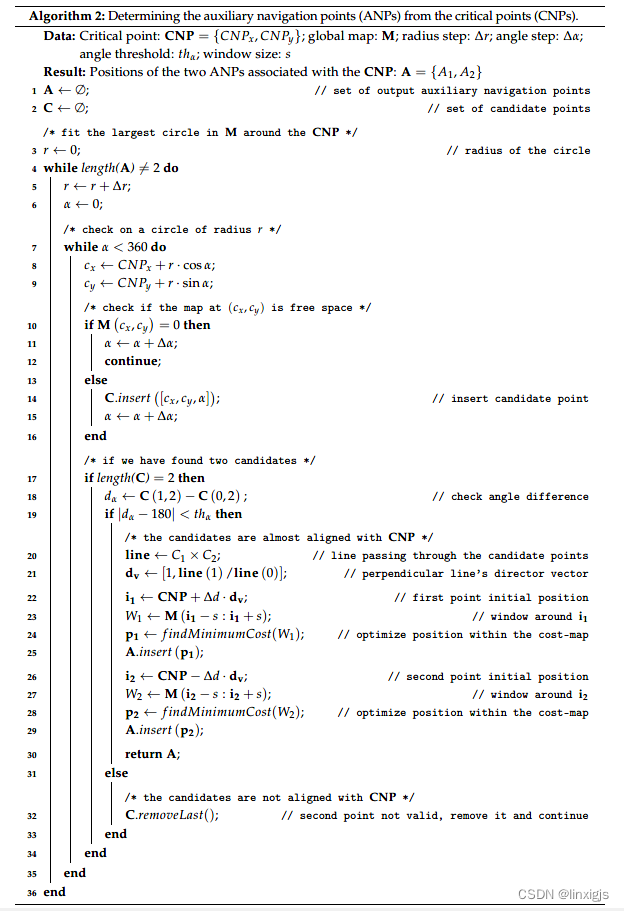
如算法2和图3,算法输入是
- 算法1输出的CNP
- 代价地图
- 半径增长步长
- 角度增长步长
- 角度阈值(共线程度)
- 预设的ANP位置微调窗口大小
算法输出和CNP匹配的2个ANP。
算法步骤:
- 外层while循环,以CNP为圆心,不断增长检查的半径,直到找到2个ANP。
- 内层while循环,不断增长检查的朝向角,获得圆周上的1个端点。如果该端点未被障碍物占据,就跳过;如果被占据,就添加到待考察的点集中。
- 若待考察的点集容量是2,就检查这2个端点是否与CNP近似共线且位于两侧(即落在直径上)。若不共线,将第2个端点从点集中删除,继续2;若共线,计算ANP,即跳到4。如图3(a-c)。
- 计算2个端点连线的垂线,从ANP沿垂线的2个方向延伸一定距离,获得初始的ANP点。如图3(d)。在以初始ANP点为中心的小窗口中,根据环境特征计算代价值,获取具有最小代价的微调后的ANP点,作为算法的输出结果。如图3(e-f)。

三、实验和展望
本文采用了4幅室内地图、4种移动机器人,进行了仿真测试和实际跑机测试。采用导航成功率(navigation success rate,NSR)来评价算法带来的性能提升。对比证明了该方法可以大幅提高室内拥挤狭窄场景的导航成功率。
本文提出了2点展望:
- 在地图中保存ANPs以便长期利用这些数据,不必一直更新计算。我觉得这取决于时效和环境地图的变化程度。如果限定机器人仍处在观测窗口中不更新ANPs的话,应该可以在计算资源、刷新频率、路径平滑程度等方面取得平衡。如果时间间隔久,室内环境很容易发生变化,如开关门、桌椅腿挪动等,历史数据是不可靠的。
- 相邻ANPs的合并。我认为这是很有必要做的。因为相邻的ANPs更容易导致机器人无意义的在小区域里往复折返,降低运动效率。如图7中红框所示。

四、问题与优化
- 本文通过窄区域的导航点计算思路,和《Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments》中固定Hybrid A*节点作为Anchors、优化平滑其他的路径点,有神似之处。具体可参见 文献阅读之自主泊车APA的路径规划 - 知乎。可惜本文没有介绍微调时的代价函数。
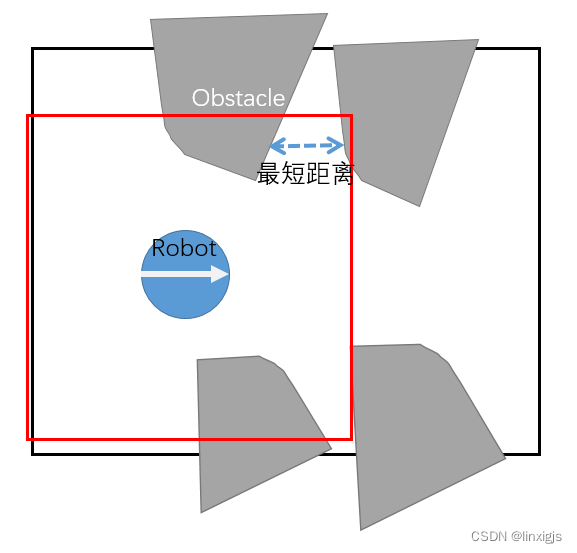
- 图2给的示例比较理想,2条边恰好处于相对的位置,2条边的夹缝也基本和机器人的行进方向一致。我认为算法1只考虑了最短距离去搜索最狭窄的可通过处,会有不适应的场景。如图8所示。如果也考虑机器人的朝向、下一步路径的行进方向,会更合理一些。
- 本文没有提及连续帧的CNP、ANP如何更新。机器人是每个局部规划周期计算,还是每个窗口覆盖范围计算一次?如果要通过连续的窄通道,又要如何处理多个临近的ANP的关系?这个问题和展望2是关联的。我认为有2种优化方式,1是基于全局地图和全局路径,动态调整窗口大小,也不一定非要正方形窗口。一次更新可以计算出多个CNP及对应的ANPs。2是对相邻的ANPs做平滑和合并。
- 算法2在确定了第1个端点后,就不会删除它了。导致如果后面一直搜索不到与第1点匹配共线的第2个端点的话,当前半径轮次就无法搜索到结果了。其实可以将符合条件的点全部暂存,在一个半径值搜索完成后,逐对检查是否有1组符合要求的ANPs。计算量会大幅增加,但更合理,计算过程可以优化。
- 本文没有提及过窄区域前后的全局路径是否需要重规划、局部路径是否平滑、是否要机器人停下原地旋转。理论上,全局规划的路径必然穿过窄区域,机器人进出窄区域的局部路径是会贴近全局路径的,没必要重规划,也不会有大的朝向变化,应该可以不停下平滑通过。
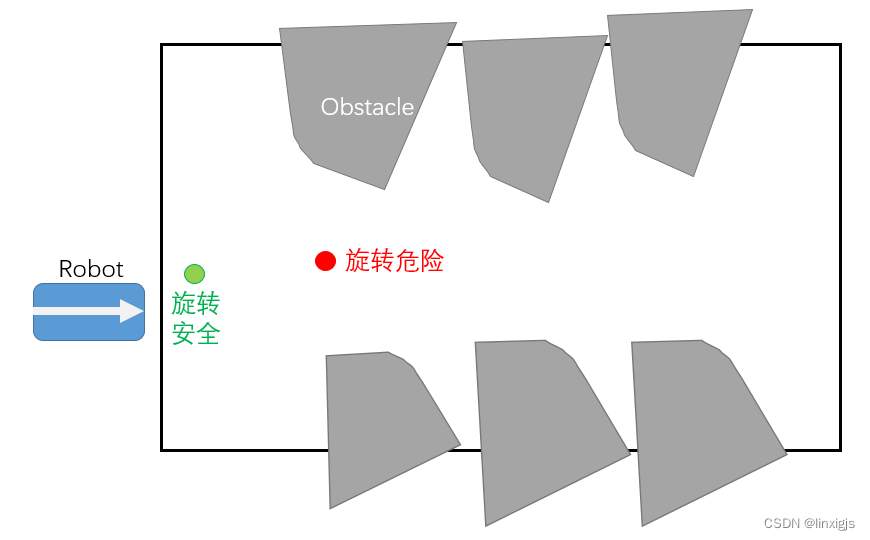
- 对于非圆形底盘的机器人,在窄区域旋转是很容易发生碰撞的。可能在进出窄区域时需要特殊处理,提前调整好朝向,即限定ANP的位置尽量远离窄区域。如图9所示。















 2617
2617











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









