







 MOLA是一个开源的SLAM框架,旨在融合多元异质传感器数据,如2D/3D Lidar、stereo、mono相机等。它提供了模块化的前端、后端和回环检测,支持平滑和批量优化模式。3D Lidar SLAM部分采用多层ICP方法提高效率和准确性。代码和论文已开源。
MOLA是一个开源的SLAM框架,旨在融合多元异质传感器数据,如2D/3D Lidar、stereo、mono相机等。它提供了模块化的前端、后端和回环检测,支持平滑和批量优化模式。3D Lidar SLAM部分采用多层ICP方法提高效率和准确性。代码和论文已开源。
MOLA
1. MOLA简介
1.1 背景
异质sensor的整合到一个SLAM方案中绝非易事,理论层面上的障碍包括不同SLAM系统对于机器人传感器系统、地图的几何描述以及机器人状态描述各不相同。目前的整合方案是图形推理库(graphical inference libraries):g2o, GTSAM, Ceres,这些库常用来做后端。但这同一个完整但SLAM方案还是有gap的。
1.2 目标
MOLA是RSS2019的文章,提出了一个开源的异质数据融合的模块化SLAM系统。这里将前端、后端、回环闭合及其对应的状态都做了封装。这样可以最小化模块之间的依赖,并进行针对性的实现替换。
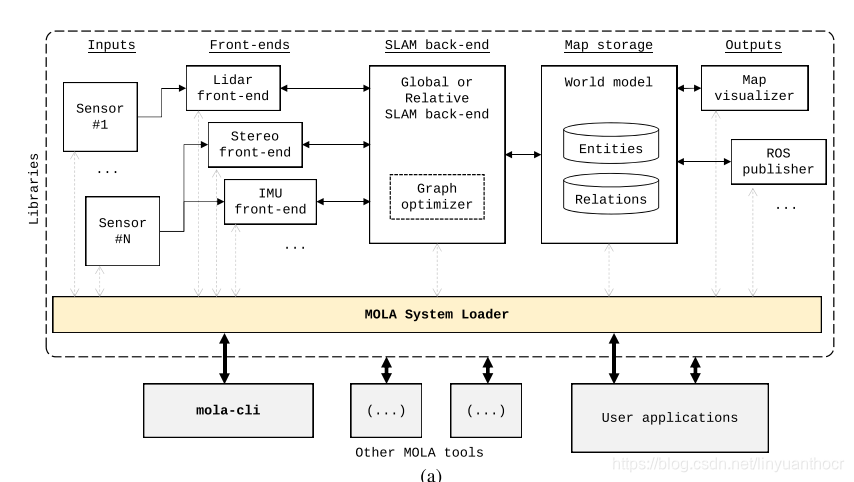
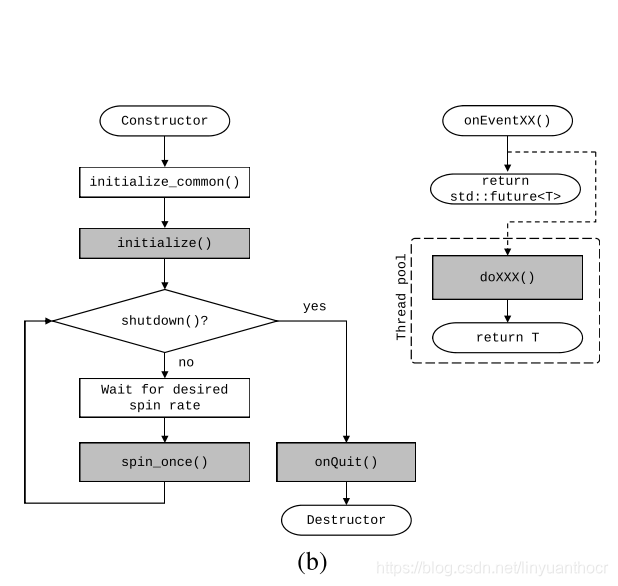
上述实现是单进程,每个模块都至少在一个线程中运行,利用shared_ptr<>实现。为方便模块封装,所有模块都来自于一个基类:有标准的生命周期,可以同步的或者按照相应输入事件动态的开启或者悬挂。
1.3 内容
- SLAM有统一的数学框架,独立于pose(SE2,SE3),独立于地图(统一的或者是子图集合)
- 独立于地图生成数据源(li
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1120
1120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









