







本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05
1. Recursive Algirithm 递归算法



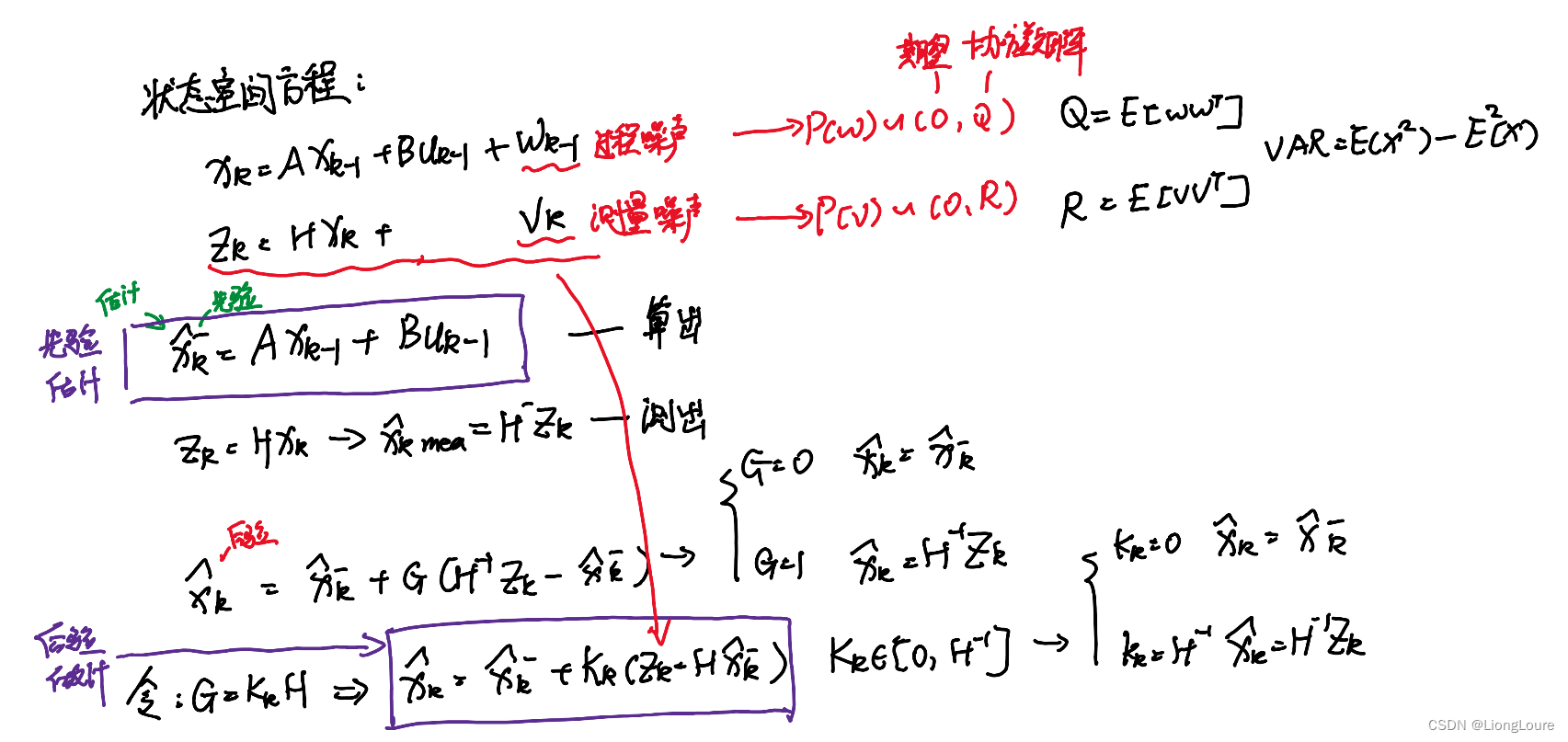
2. Data Fusion 数据融合Covarince Matrix协方差矩阵State Space状态空间方程 Observation观测器




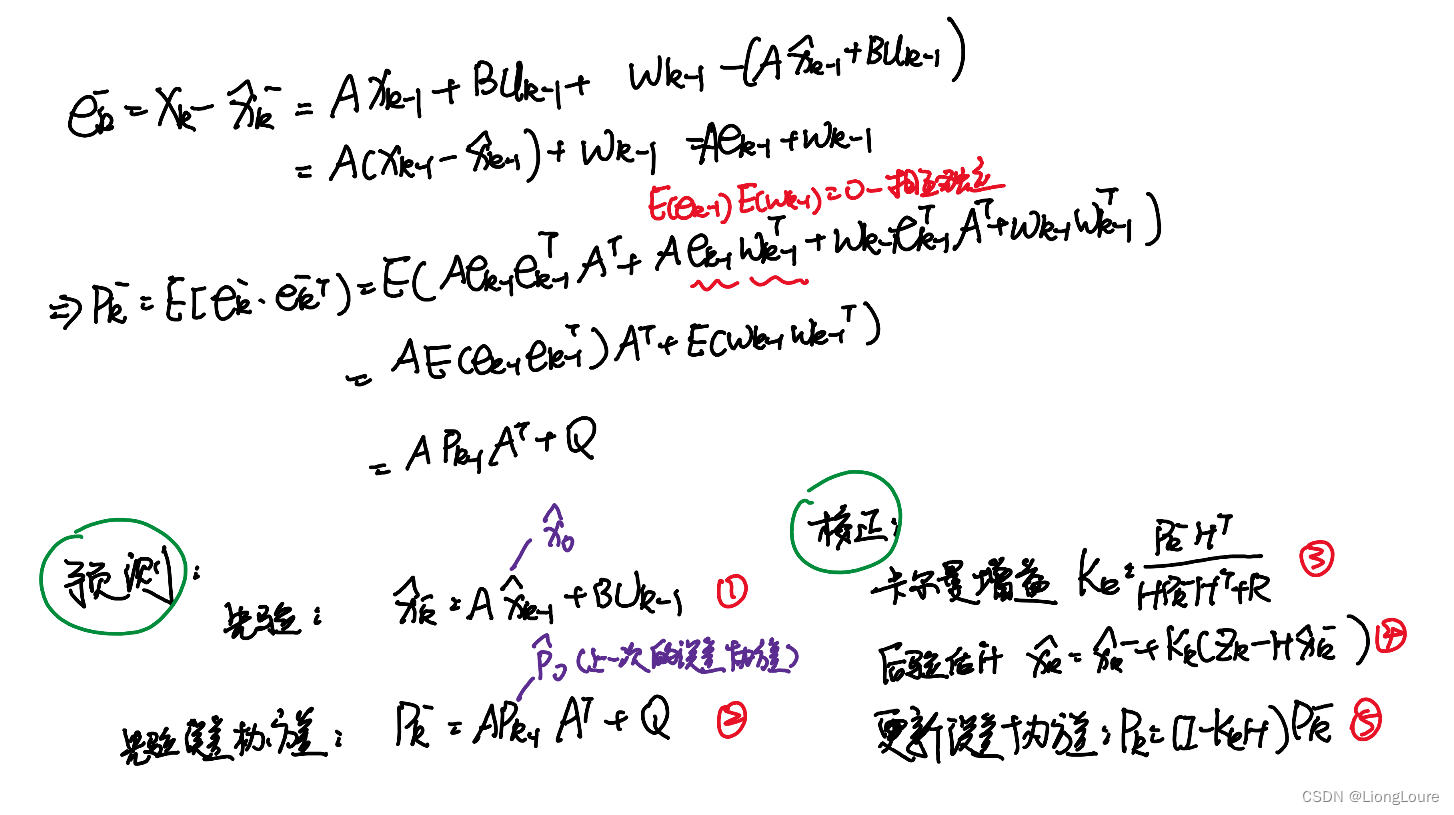
3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
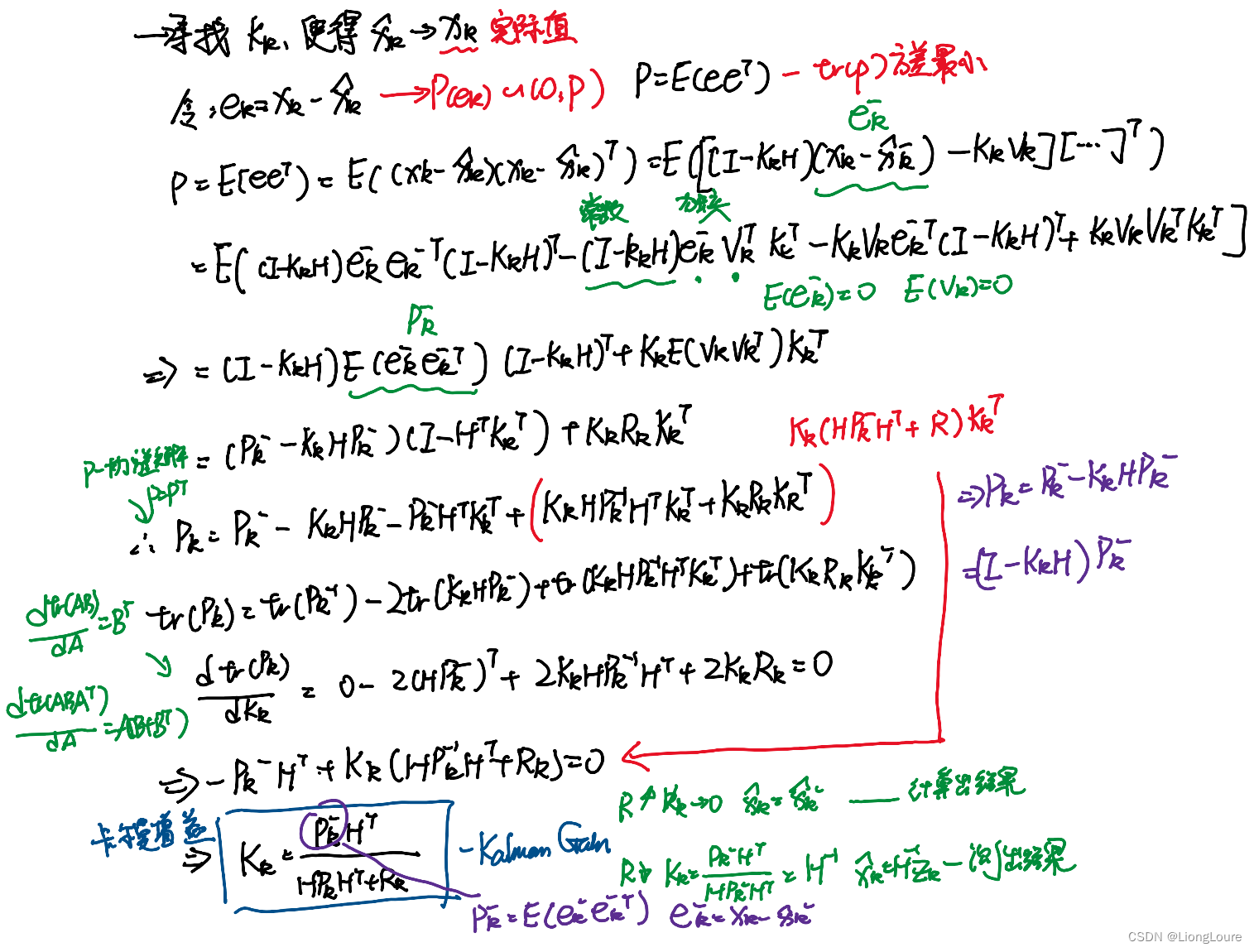
4. Priori/Posterrori error Covariance Martix 误差协方差矩阵
5. An Example 2D例子


6. Extended Kalman Filter扩展卡尔曼滤波器(EKF)


















 120
120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











