






视觉SLAM中的X点法
在VSLAM当中,我们经常会接触一些算法叫做X点法,如常见的五点法、八点法等,它们其实是解决不同问题的不同算法,只是名字容易搞混,所以,在这里将常见的X点法梳理一遍。

附赠自动驾驶学习资料和量产经验:链接
二点法:P2P
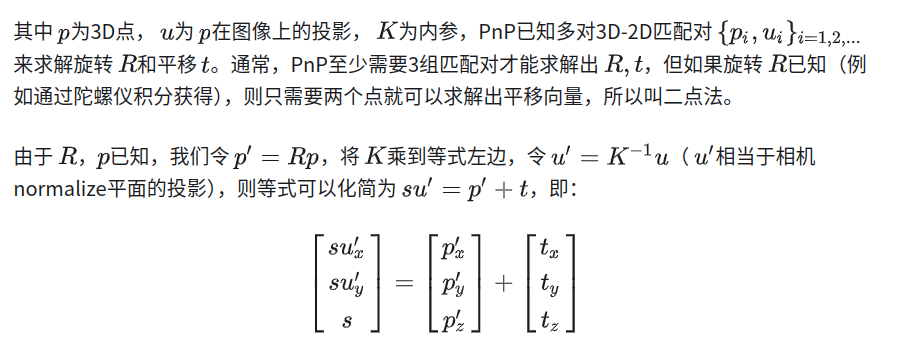
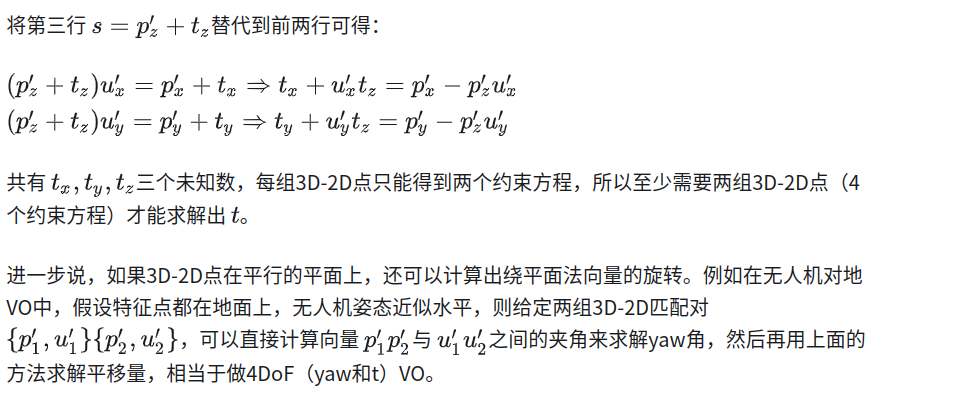
P2P是一种4DoF PnP算法,常用在特征点匹配中剔除outlier(Two-Point RANSAC),也可以用来估计平移量。我们知道PnP是根据3D-2D匹配计算旋转和平移的一类算法,它是求解如下等式:
三点法
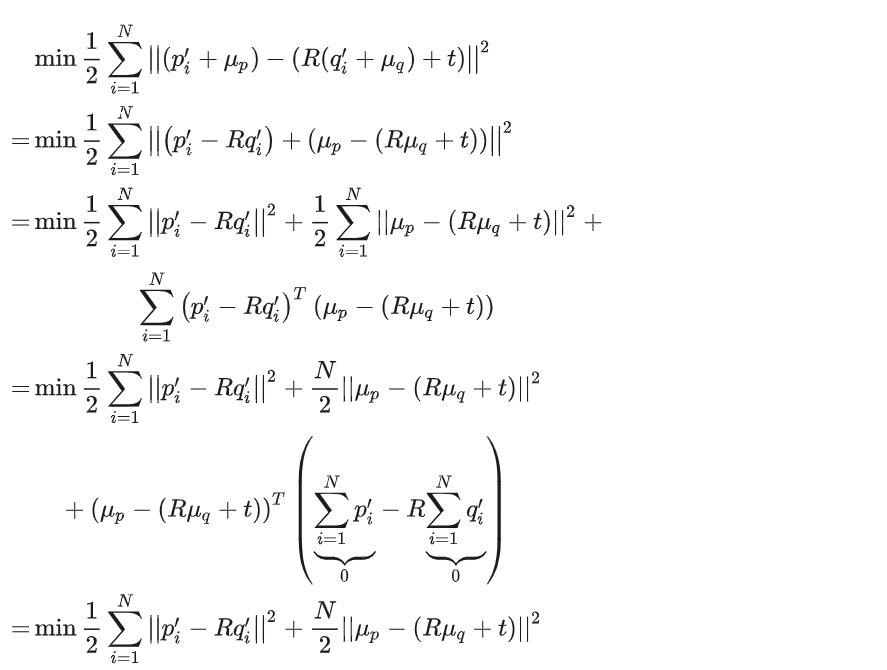
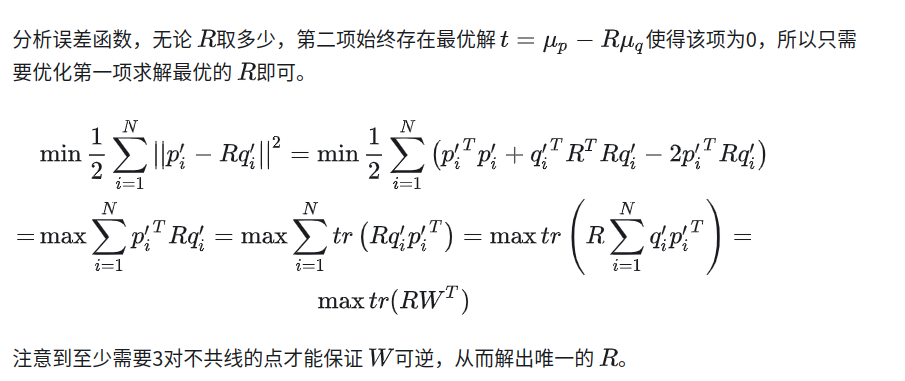
a. 3D-3D位姿匹配,ICP
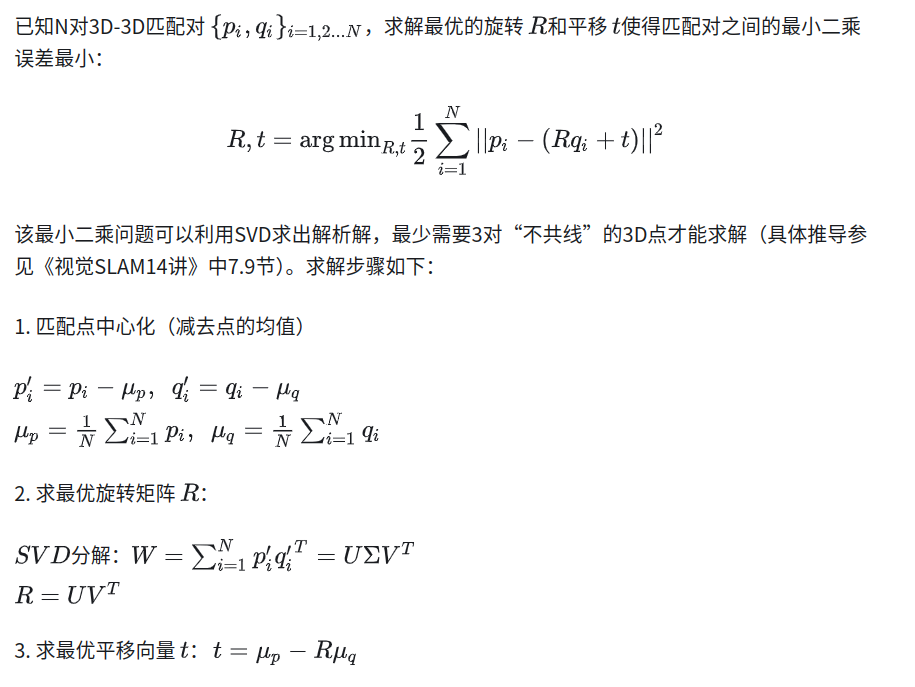
推导过程如下:
b. P3P

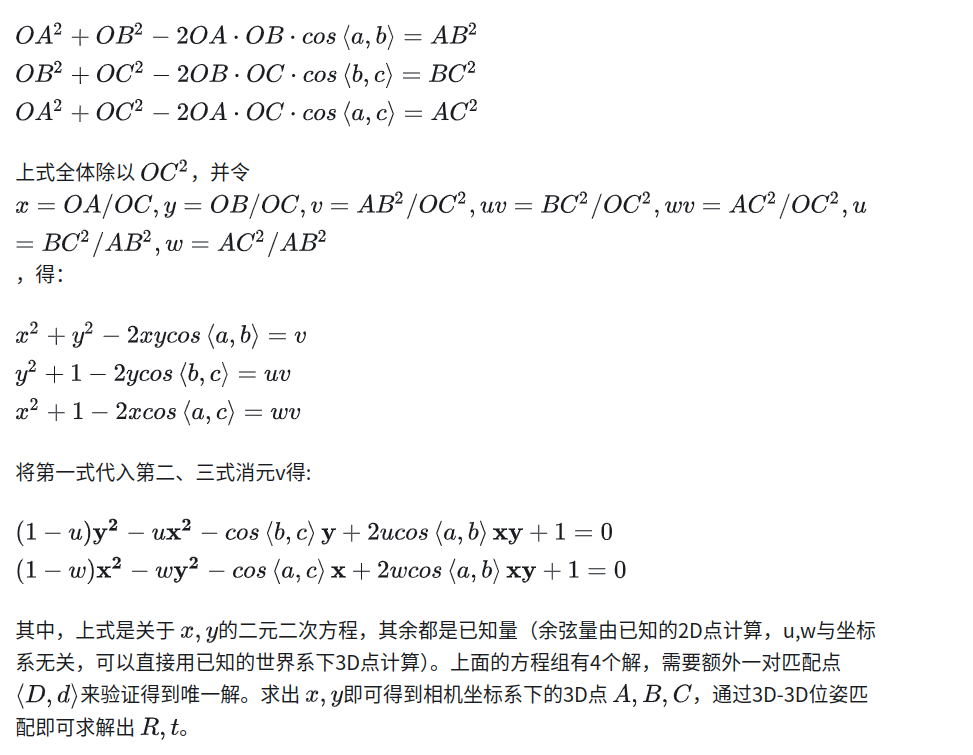
由余弦定理可知:
四点法
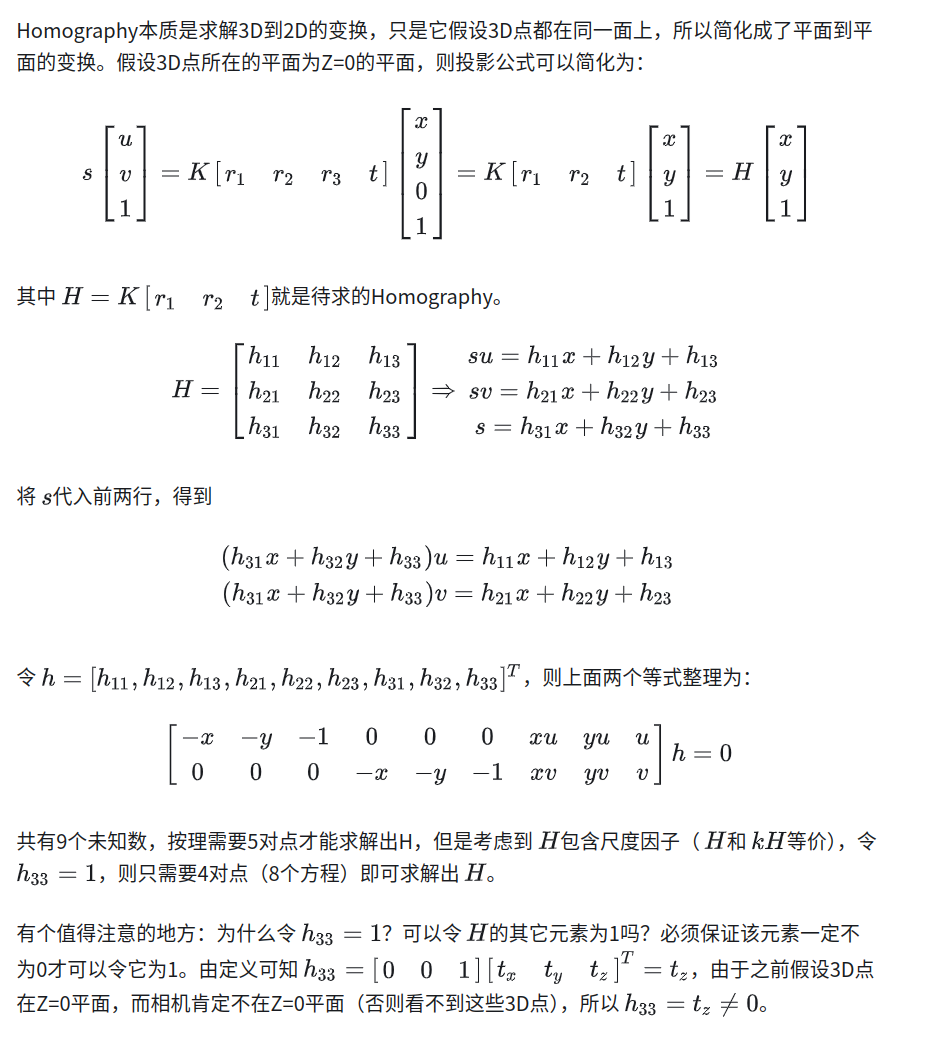
a. Homography
b. EPnP
EPnP:An Accurate O(n) Solution to the PnP problemicwww.epfl.ch/~lepetit/papers/lepetit_ijcv08.pdf
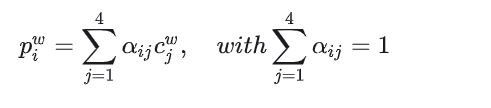
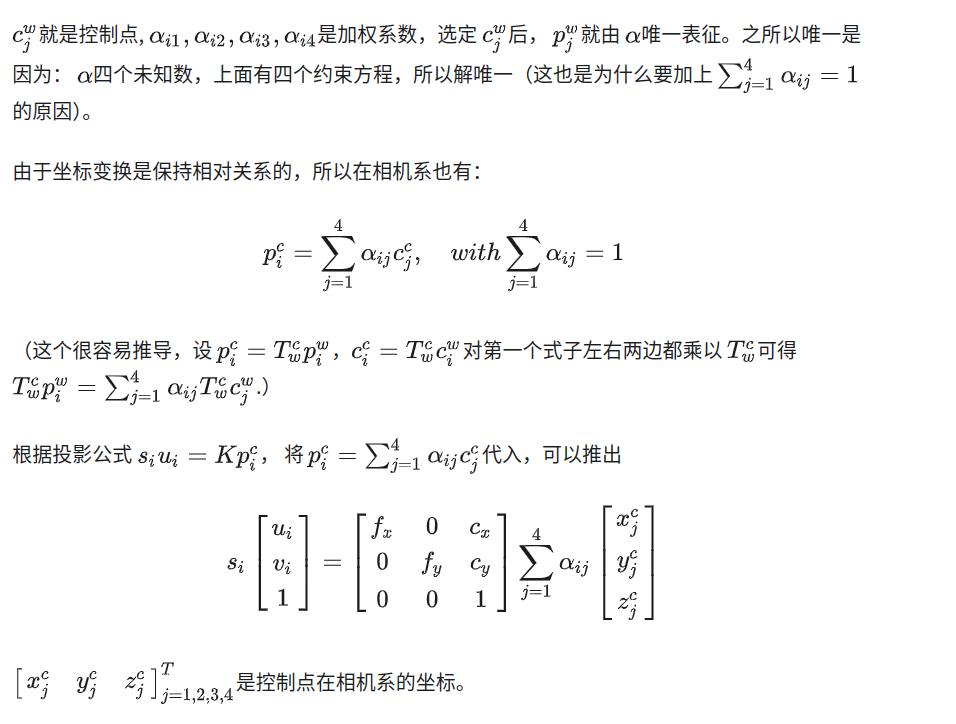
EPnP在世界系中选取4个点(称之为控制点,论文中取的3D点中心加PCA3个单位向量的点),将世界坐标系中所有点表示成控制点的加权,如下:

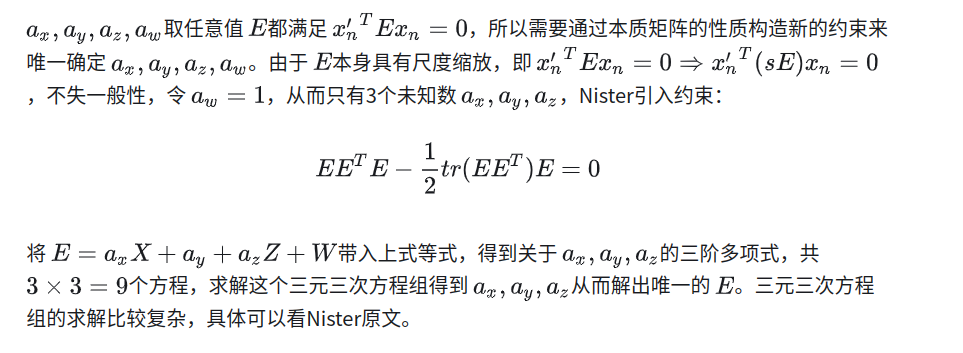
五点法:Essential Mat

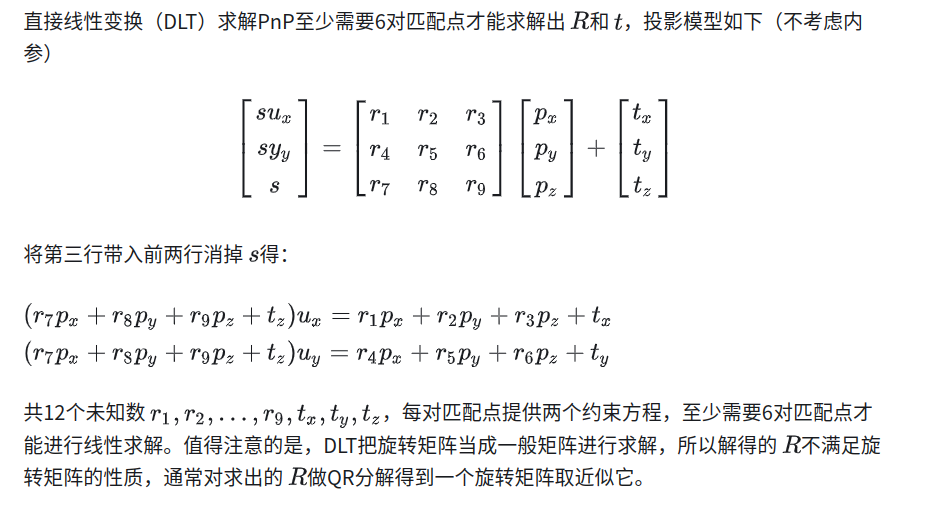
六点法:PnP DLT
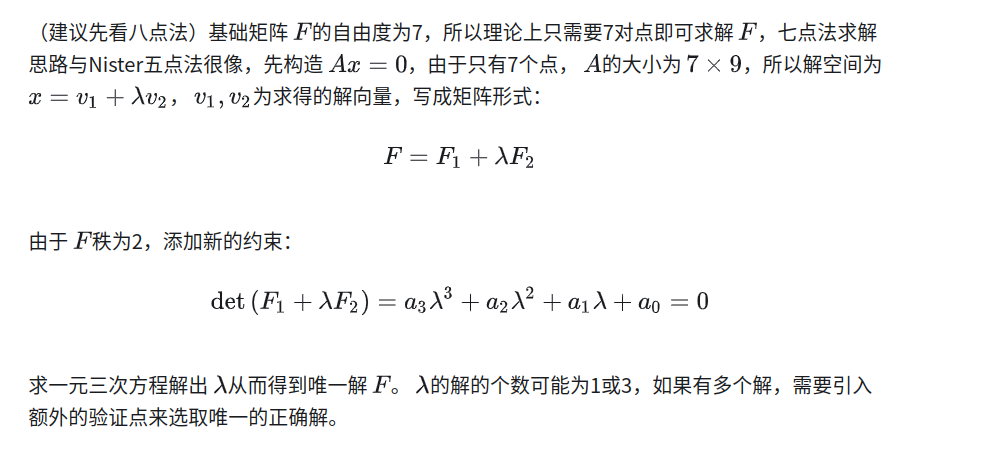
七点法:Fundamental Mat
Seven-point algorithmwww.cs.unc.edu/~marc/tutorial/node55.html
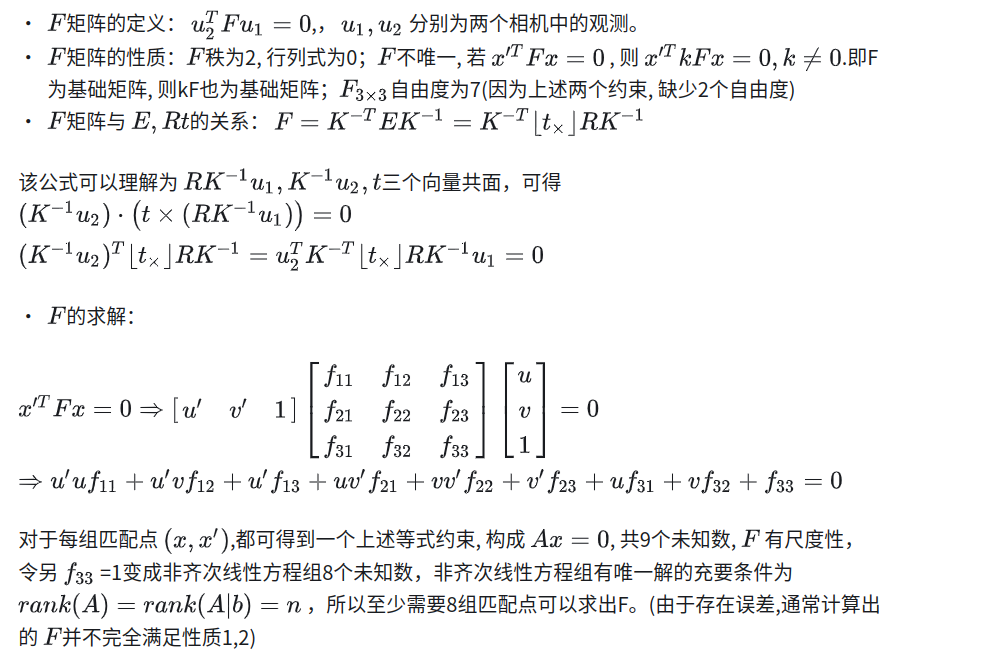
八点法:Fundamental Mat
总结
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









