







摘要
本文是对《视觉SLAM十四讲》第七讲“视觉里程计”理论部分的个人总结。重点讨论完成特征匹配后,根据匹配的点对来估计相机的运动。即基于特征点方式的视觉里程计算法。
代码参见:https://download.csdn.net/download/qq_43145072/10899987
根据相机的原理不同,主要分以下几种情况:
1.(2D-2D):对于单目相机,只知道2D像素坐标,则问题变为根据两组2D点估计运动。一般采用对极几何。
2. (3D-3D):对于双目或者RGB-D相机(深度可获得),则问题变为根据两组3D点对估计相机运动。一般采用ICP方法。
3. (3D-2D):对于已知3D点及其在相机的投影位置,则变为PnP问题。
1、2D-2D问题:对极几何
2D-2D问题是如何从两张图像中已经匹配的特征点对,恢复出两帧之间相机的运动。
1.1、对极约束
以下图为例,我们目标是求取图像i1和i2之间的运动(第一帧到第二帧的R和t)。P为空间中的一点。p1和p2为匹配的一对特征点。

根据几何关系进行推导,可得以下对极约束:(7.7)或者(7.8).
 对极几何约束简洁地给出了两个匹配点的空间关系。
对极几何约束简洁地给出了两个匹配点的空间关系。
于是相机位姿估计问题可以分为以下两步:
1.根据配对点的像素位置求出E或者F;(式7.7或7.8)
2.根据E或者F,求R,t;(式7.9)
E和F只相差了已知的相机内参。后面均以E为例讨论上述两步问题求解。
1.2、三角测量
根据对极几何求得相机运动后,(单目SLAM)需要通过三角测量的方法估计地图点的深度。
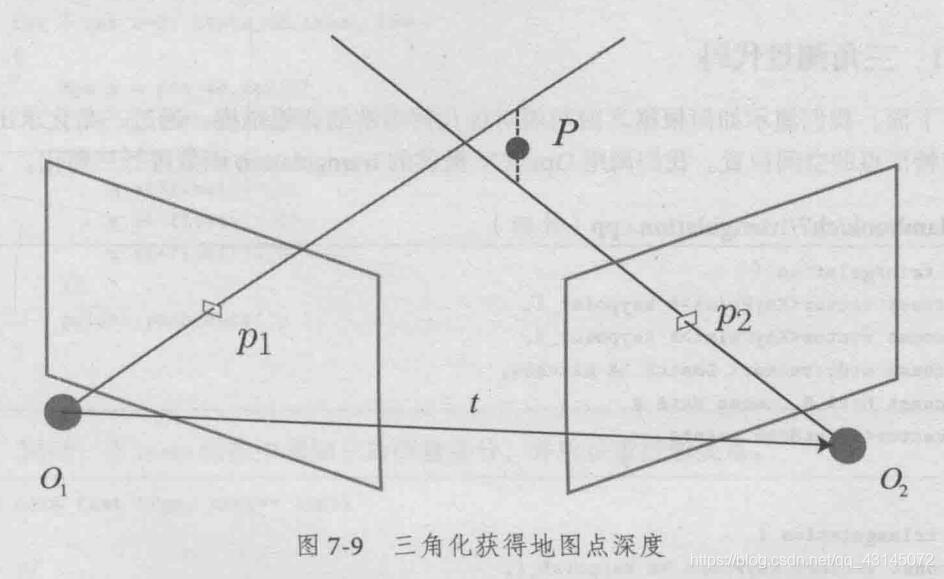
根据匹配的特征点对以及R,t即可求得深度。过程如下:


2、3D-2D问题:PnP
PnP(perspective-n-point)求解的问题是:已知n个3D空间点及其投影位置时,如何估计相机运动。
PnP的求解有很多种方法,如直接线性变换(DLT)、P3P、BA等。
2.1、直接线性变换(DLT)


经过以上推导,可以实现对矩阵T的求导,也就是[t1,t2,t3],从而完成相机运动的求解。
2.2、P3P
P3P需要三对点的给定关系。输入数据为3对3D-2D匹配点。记3D点为A,B,C,2D点为a,b,c。小写字母代表的点是大写字母代表的点在相机成像平面的投影。
我们知道。A,B,C是世界坐标系的坐标,一旦这些3D点在相机坐标系下的坐标能够算出,就得到了3D-3D对应点,从而将PnP问题转换为ICP问题。
ICP问题的求解在第三节讲述。

2.3、(Bundle Adjustment)BA
在PnP中,BA问题是一个最小化投影误差(Reprojection error)问题,通过构建李代数上的非线性最小二乘问题来求解 。BA不同于2.1和2.2中的线性方法,它采用的是非线性优化,将相机位姿和空间点位置看作优化变量,一起进行优化(而前面两种方法是先计算相机位姿再求空间点位置)。

与之前用R,t表示相机运动不同,这里用李代数表示相机运动,以便计算。
构建最小二乘问题如下:

计上述最小二乘问题中误差为e,则求解该问题的关键是推导雅可比矩阵的形式。
这里e为像素坐标误差(二维),当待优化量为相机位姿(6维)时,雅可比矩阵为2x6的矩阵,其形式为:

当待优化量为空间点的位置(3维)时,雅可比矩阵为2x3的矩阵,其形式为:
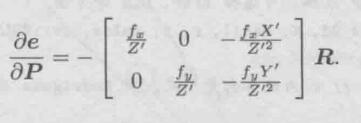
至此,得到了关于相机位姿和特征点位置的两个雅可比矩阵,将为优化过程提供重要的梯度方向,指导优化迭代。
3、3D-3D:ICP


上面这个问题可以用迭代最近点(ICP)求解。需要注意的是,这里指的是对已经匹配好的两组点进行运动估计问题。
ICP方法分为两种:利用线性代数的求解(如SVD),以及利用非线性优化方式的求解(类似于BA)。
3.1、SVD方法

式7.49的求解过程参考高翔《视觉slam十四讲》部分。不再详细讨论。
3.2、非线性优化方法

小结
1.如何通过2D-2D的特征点估计相机运动(对极几何);
2.如何通过2D-2D的匹配估计点的空间位置(三角测量);
3.3D-2D的PnP问题,包括线性方法(直接线性变换DLT、P3P、)与非线性优化(BA等);
4.3D-3D的ICP问题,包括线性方法(SVD方法)与非线性优化;














 2427
2427











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









