



ros在用catkin_make编译每个package时默认是乱序的,不一定先编译包里的msg和srv等再编译src源码,这就造成了有时候还没有编译msg里的自定义消息生成对应的头文件就去编译要包含该头文件的源码时报错。
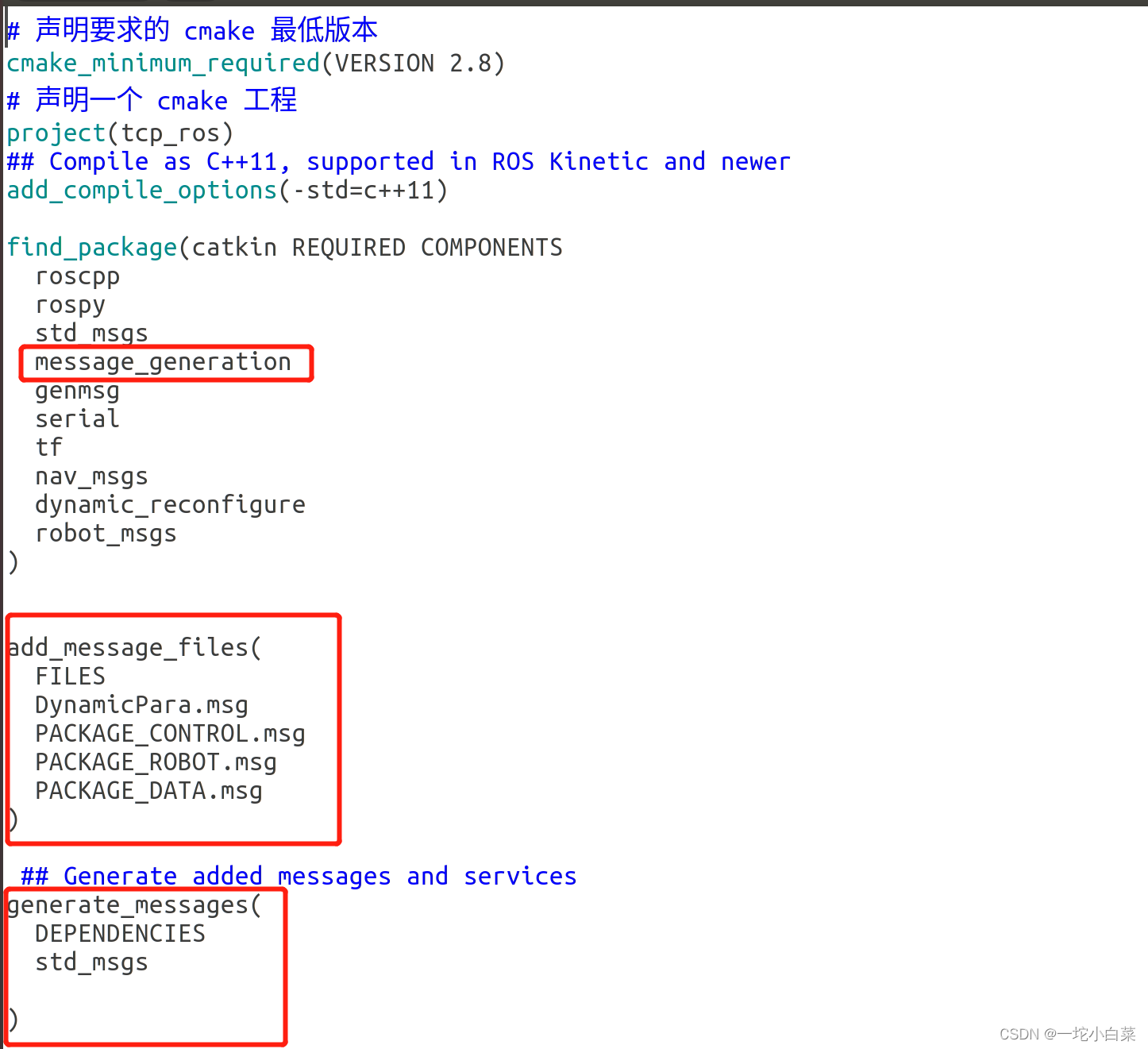
采用自定义msg消息时CMakeLists:
红框内容是生成自定义msg的必须指令
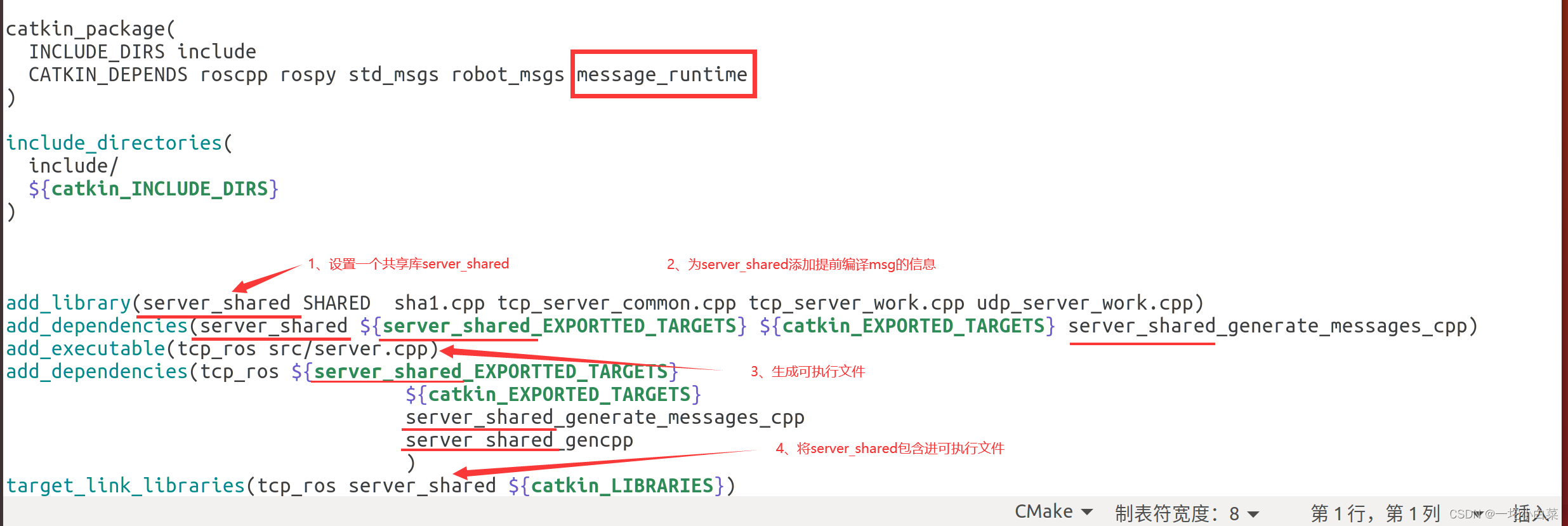
然后是配置编译顺序
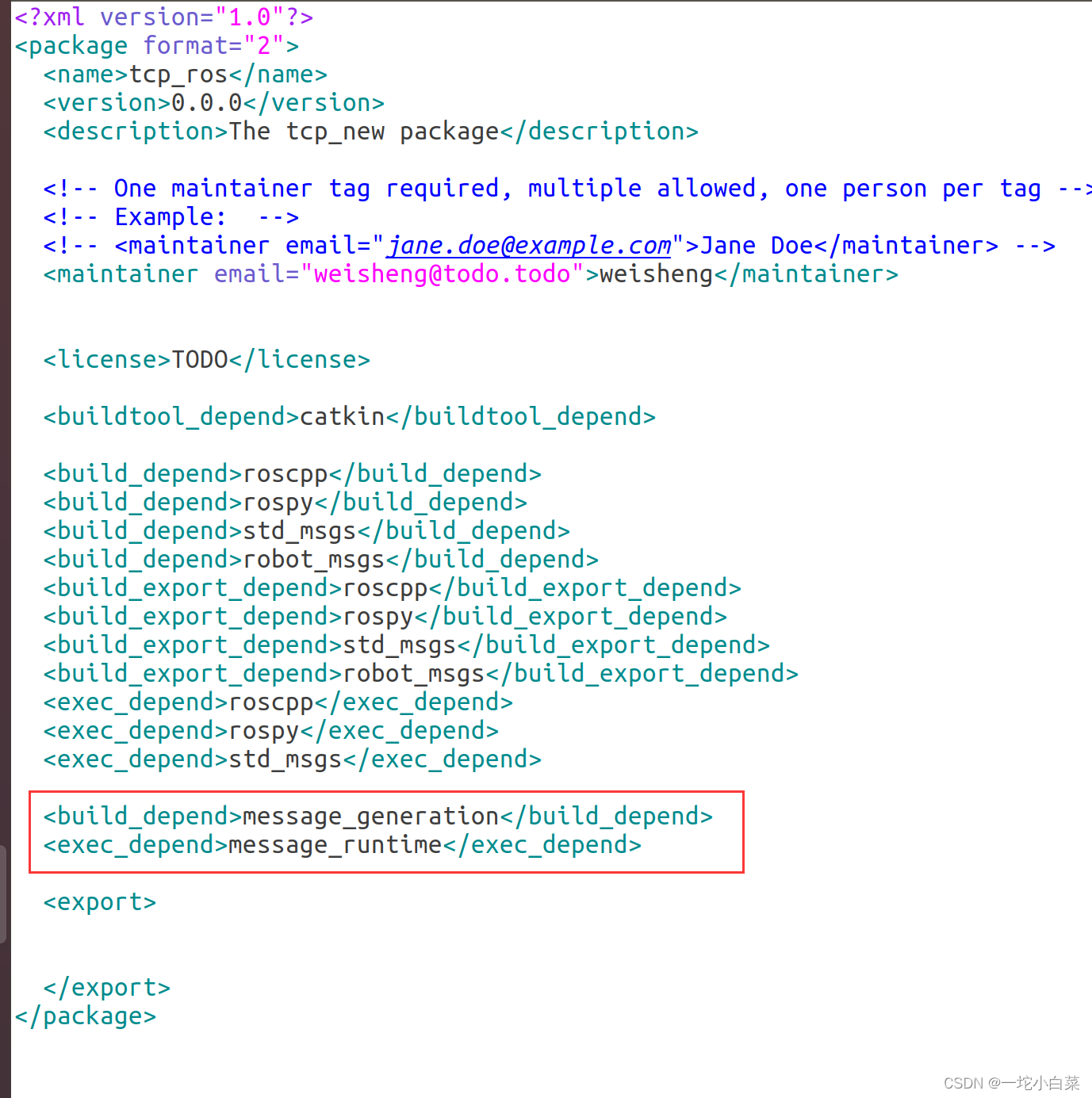
package.xml:
 ROS在使用catkin_make时可能会出现乱序编译的问题,导致在编译自定义msg消息时因头文件未生成而报错。解决方法是在CMakeLists.txt中正确配置编译顺序,确保msg先于src编译,以避免依赖错误。
ROS在使用catkin_make时可能会出现乱序编译的问题,导致在编译自定义msg消息时因头文件未生成而报错。解决方法是在CMakeLists.txt中正确配置编译顺序,确保msg先于src编译,以避免依赖错误。
ros在用catkin_make编译每个package时默认是乱序的,不一定先编译包里的msg和srv等再编译src源码,这就造成了有时候还没有编译msg里的自定义消息生成对应的头文件就去编译要包含该头文件的源码时报错。
采用自定义msg消息时CMakeLists:
红框内容是生成自定义msg的必须指令
然后是配置编译顺序
package.xml:
 1237
2781
3840
1237
2781
3840

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























