







目录

一、产品概述
JC系列直流无刷电机驱动器采用32bit、主频200MHz、带FPU(浮点运算单元)的高性能MCU,结合优化后的ODrive技术,可以实现电机的高精度、高响应、大扭矩应用场景,让您体验最新FOC技术的澎湃动力!
二、驱动器参数
2.1、产品尺寸

2.2、技术参数

三、接口说明
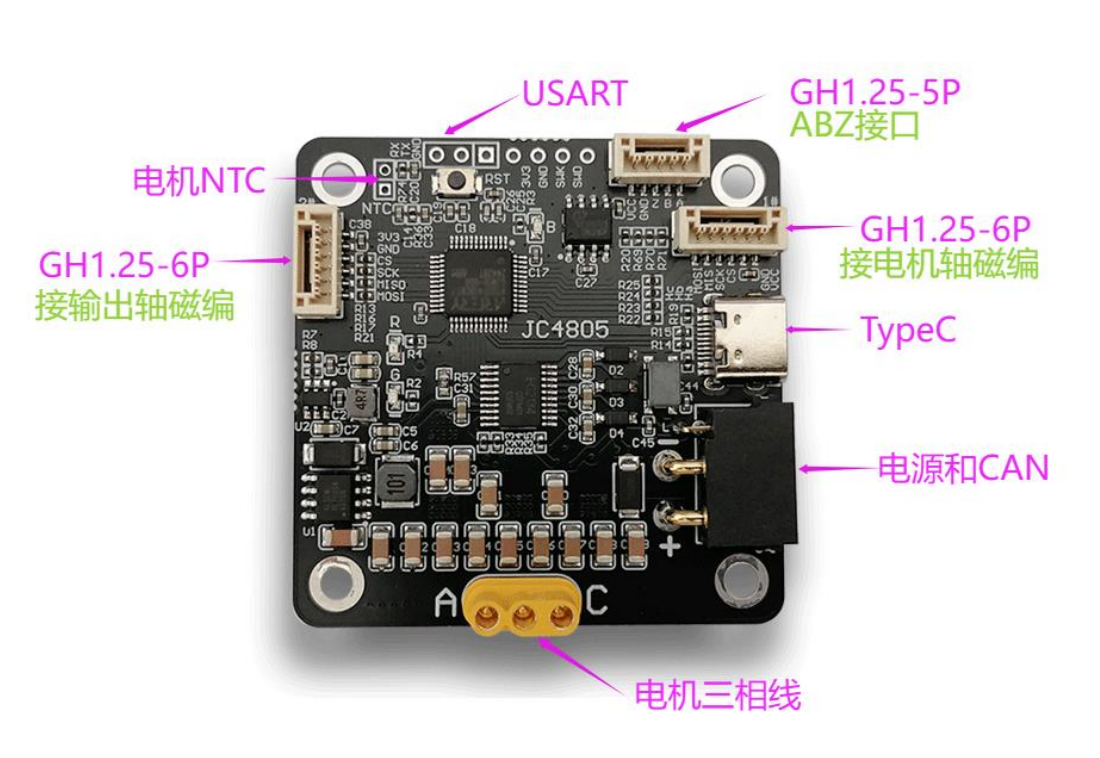
3.1、电源接口
- 电源设计耐压为 50V,推荐工作电压 7-36V,如果是小功率云台电机,工作电压可适当
提高,但不得高于 45V。 - CAN 接口与其它 CAN 设备连接时,CAN_H 接 H 信号,CAN_L 接口 L 信号。
- 板子背面有 120Ω电阻短接点“CAN+R“,通信网络中如需接入 120Ω电阻,短接焊点即
可。

3.2、电机接口
电机三相线与ABC连接,三相线可随便接,相线顺序改变后需要重新对电机进行校准。
3.3、USB接口
通过Type-C接口与上位机连接,可设置电机参数和控制电机转动。
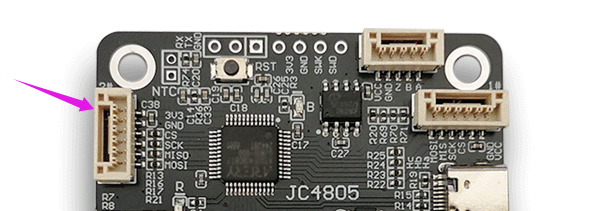
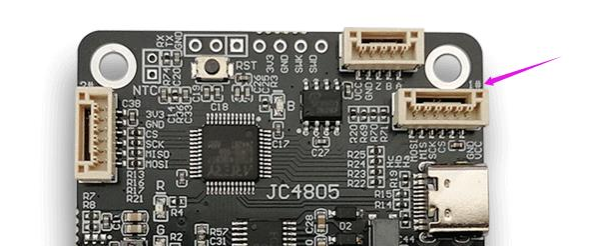
3.4、1# SPI 接口
- 接电机轴的磁编码器,3V3 接正极,GND 接负极,CSn/SCK/MISO/MOSI 分别与编码器
的信号一一对应连接。 - 目前支持 SPI 接口的 AS5047P、MT6701、MA730、TLE5012B、MT6835 几种编码器,
可根据用户需求扩展。
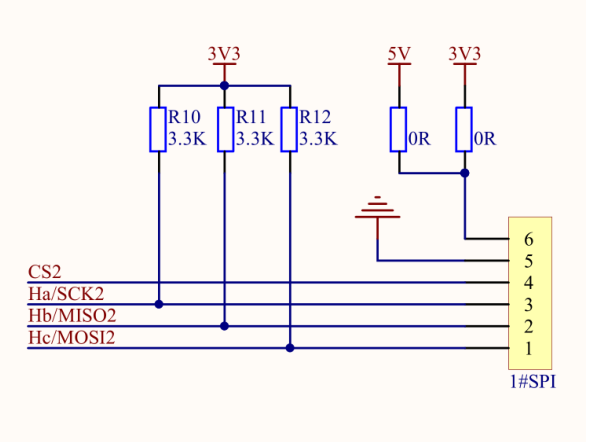
3.5、Hall 接口
Hall 接口共用 1#SPI 接口,Ha /SCK,Hb/MISO,Hc/MOSI。
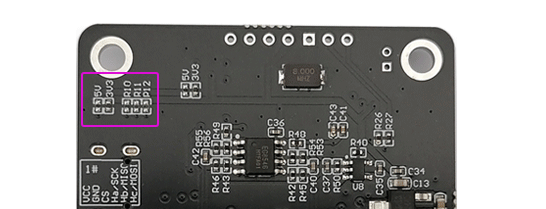
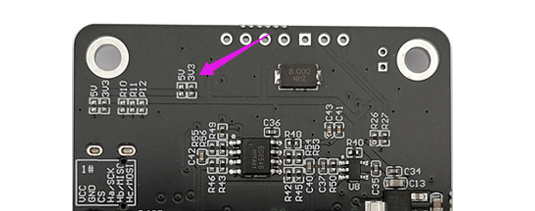
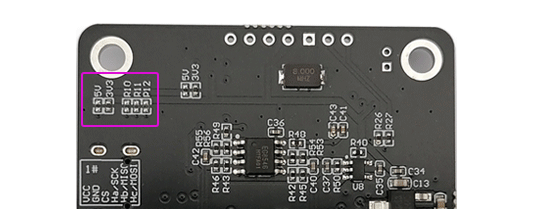
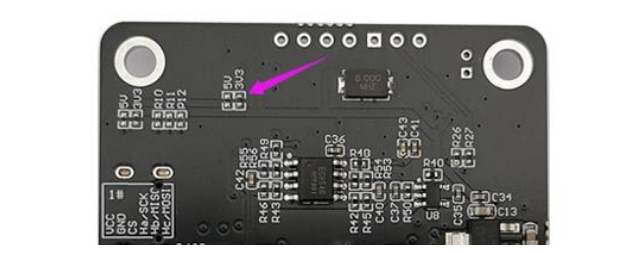
板子背面有 3V3 和 5V 的跳线,默认短接 3V3。如果有霍尔传感器必须用 5V 供电,可
以短接 5V,同时断开 3V3(注意,5V 和 3V3 不能同时短接)。如果霍尔信号须接上拉电阻,
R10、R11、R12 焊接 3.3K 电阻,默认不焊接。
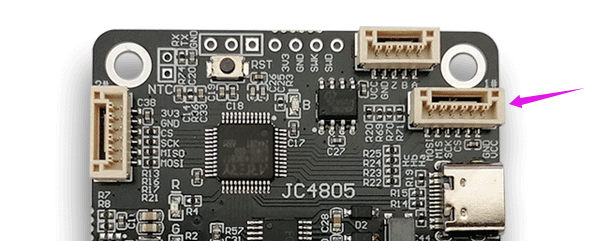
3.6、ABZ接口
- ABZ 接口可接磁编码器或光栅编码器的 AB 或 ABZ 接口。既可以接电机轴的 AB 编码
器,也可以接输出轴的 AB 编码器。 - 板子背面有 3V3 和 5V 的跳线,默认短接 3V3。如果有光栅编码器必须用 5V 供电,可
以短接 5V,同时断开 3V3(注意,5V 和 3V3 不能同时短接)。 - 电机轴为 ABZ 编码器,电机校准后的参数无法保存,需要每次上电都校准。
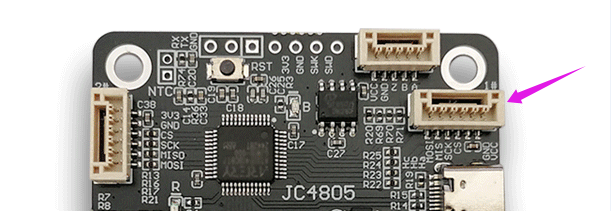
3.7、2# SPI 接口
- 用于双编配置,接输出轴的磁编码器。
- 目前支持 SPI 接口的 AS5047P、MT6701、MA730、TLE5012B、MT6835 几种编码器,
可根据用户需求扩展。
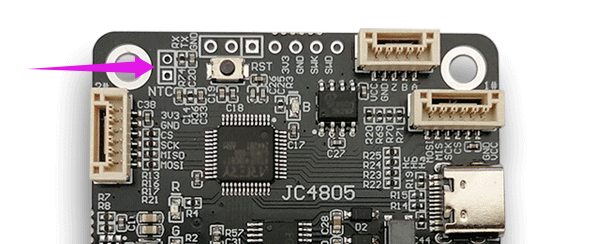
3.8、USART接口
- 默认波特率115200,可通过当前接口设置参数并控制电机,提供有《JC系列串口通信协议》。
- 可通过USART接口升级固件。
3.9、电机温度检测
- 使用10K的1%精度NTC热敏电阻,焊接在两个过孔中。
3.10、状态指示灯
- 绿色为电源指示灯,上电常亮,
- 蓝色为运行指示灯,1 秒周期闪烁,
- 红色为故障指示灯,正常情况下不亮,故障时常亮。
四、硬件接线
- 电源线注意正负极;
- 电机三相线随便接;
- 驱动板的 SPI 接口和编码器的 SPI 接口两边的信号要一一对应。
- Type-C 接入电脑后虚拟为 com,“USB 转串口”的驱动已集成在 windows 系统内,不需
要安装驱动。(如果不能识别,请尝试更换 Type-C 数据线) - 如果接 CAN 通信,黄色接 H,绿色接 L

购买链接:https://item.taobao.com/item.htm?ft=t&id=836702624227&spm=a21dvs.23580594.0.0.52de2c1bcMCEOd&skuId=5594543261696
五、软件操作
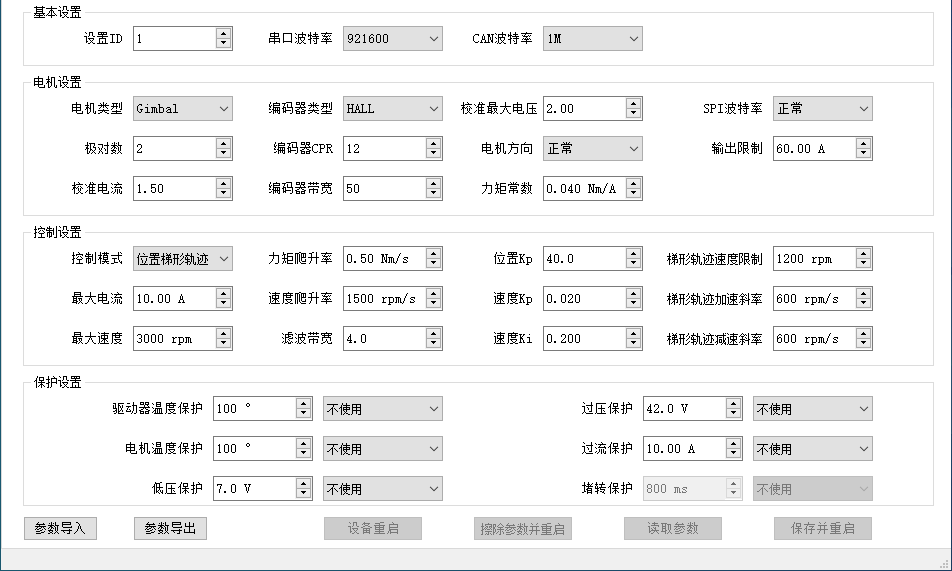
5.1、设置参数

- 根据实际使用的电机设置以上参数,如有不了解的参数,请看《设置参数说明》文档。
- 点击【保存并重启】,驱动器保存参数并重启。如果驱动板是通过 USB 和电脑连接,串
口号也会重启,请点击【断开连接】和【连接设备】,再次连接上驱动器。 - 设置好的参数可以通过【参数导出】保存起来,以后使用【参数导入】。导出和导入的
参数包含了本页面的基本参数和校准电机页面的高级设置参数。
5.2、校准电机
切换到校准电机界面,注意,校准时电机不能带负载,否则校准容易出错。

- 校准电机
点击【校准电机】,显示“校准中…”,
1、如果是“High Current”类型电机,电机先“嘀”一声测量电阻电感(耗时约5秒),然后再正转一圈反转一圈(耗时约10秒),校准完成,总计约15秒。
2、如果是“Gimbal”类型电机,电机直接正转一圈反转一圈,校准完成,约10秒。
3、Hall电机校准时多了两个校准步骤,需要更多时间,请耐心等待。
校准期间如有错误,驱动器停止校准同时故障灯(红灯)点亮。 - 查看校准结果
点击【读取参数】,如果电机还没有校准,提示“尚未校准”;如果电机正在校准,提示“校准中…”,如果校准完成,提示“校准成功”;如果校准错误,提示“校准失败”。 - “上电是否进入闭环”打勾,以后上电电机直接进入闭环模式;如果不打勾,需要发送“进入闭环”指令才能进入闭环模式。
注意,电机必须校准成功,才能上电后进入闭环模式。
ABZ编码器必须每次上电后校准一次,此处不要打勾,否则上电提示故障。 - 保存校准
待电机校准成功后,点击【保存校准】,校准结果保存到驱动板,以后上电可以不再校准(ABZ编码器除外)。
5.3、运行调试

-
设置原点
把电机转到指定位置,点击【设置原点】,当前绝对角度为 0,同时重启。下图:

-
进入闭环
如果驱动板已经设置了“上电后进入闭环”,重启后直接进入闭环状态,否则点击【闭环模式】,电机进入闭环状态。下图:

-
实时显示
点击【打开实时】,软件左上边显示实时数据,曲线显示实时速度。下图:

- 发送位置
“绝对位置”输入角度,点击“发送”,电机转到指定角度;也可以设置“相对位置”角度,电机以当前角度加相对角度值为目标角度。下图:

- 切换控制模式
切换为”速度模式“,点击”发送“,然后设置速度,点击”发送“,电机按照设定速度转动。下图:

- 调整PI参数
如果电机控制不稳定,可尝试调整 PI 参数,对比控制效果。
一般负载小的时候 PI 参数小,负载大的时候 PI 参数调大。调试时先把速度 I 参数设置为 0,只调速度 P 参数,待调试稳定后再逐渐增加速度 I 参数。
无论是位置模式还是速度模式,都必须在电机静止时设置,“发送到 RAM”,先测试确定参数控制效果可以后,点击“保存”。下图:

5.4、故障码说明
电机运行过程中可能会出现各种故障,在实时显示中可以读出“错误标志“,故障标志为16进制显示,下面说明各bit代表的故障:

六、CAN模块操作
JC4805的CAN通信为标准帧,波特率默认1M(可通过 UART 接口修改),
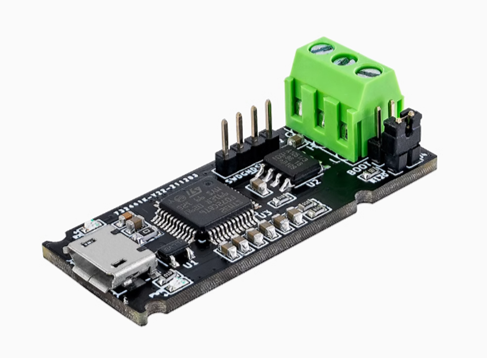
6.1、使用CANable
通过 USB 调参以后,您可以使用任何一款 CAN 模块,通过逐条发送指令的方式控制驱动器,比如 CANable:

6.2、指令示例
标准帧,默认波特率1M
1、读取电压:帧ID: 0x601,长度 8 数据:4B 00 04 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:4B 00 04 00 00 F3 00 00 (24.3V)
2、进入闭环:帧ID: 0x601,长度 8 数据:2B 00 A2 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:60 00 A2 00 00 00 00 00
3、绝对位置 0°:帧ID: 0x601,长度 8 数据:23 00 23 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:60 00 23 00 00 00 00 00
4、绝对位置 360°:帧ID: 0x601,长度 8 数据:23 00 23 00 00 00 8C A0
回复:帧 ID: 0x581,长度 8 数据:60 00 23 00 00 00 00 00
5、读取位置:帧 ID: 0x601,长度 8 数据:43 00 23 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:43 00 23 00 00 00 8C A0
6、切换为速度模式:帧 ID: 0x601,长度 8 数据:2B 00 60 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:60 00 60 00 00 00 00 00
7、设置速度 500rpm:帧 ID: 0x601,长度 8 数据:23 00 21 00 00 00 C3 50(50000)
回复:帧 ID: 0x581,长度 8 数据:60 00 21 00 00 00 00 00
8、读取速度:帧 ID: 0x601,长度 8 数据:43 00 06 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:43 00 06 00 00 00 C3 50
9、空闲模式:帧ID: 0x601,长度 8 数据:2B 00 A0 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:60 00 A0 00 00 00 00 00
10、重启:帧 ID: 0x601,长度 8 数据:2B 00 A5 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:60 00 A5 00 00 00 00 00

6.3、其它
更多CAN指令操作,请看《JC系列CAN通信说明》。
七、高级设置
校准电机界面有 step/dir 设置和双编码器设置。

7.1、step/dir 设置
- step/dir 模式,需要电机设置为位置模式,请先把电机的基本参数配置并测试好。
- 接口共用 ABZ 接口,当 step/dir 模式设置后,ABZ 引脚被占用。输入信号电压兼容 3.3V-5V,推荐 3.3V。
- A 引脚接 step 信号,脉冲信号频率范围 50Hz—20KHz,轮毂电机实测 100HZ—1KHz。
- B 引脚接 dir 信号,高电平为正转,低电平反转。
- C 引脚接使能信号,高电平进入闭环模式,低电平进入空闲模式。
7.2、双编码器设置
打勾【使能第二编码器】,其它四个参数设置与电机轴编码器相同。使能第二编码器后,电机的实时速度和实时位置,都自动切换为第二编码器的状态;设置的目标速度和目标位置也都为第二编码器的目标值。

7.2.1、电机轴编码器接口
1#SPI 为电机轴编码器接口,Hall 信号也接在这个接口上,Ha /SCK,Hb/MISO,Hc/MOSI。
7.2.2、输出轴编码器接口
2# SPI 为输出轴磁编码器接口。
7.2.3、参数配置


7.2.4、操作流程
保存参数后【校准电机】。校准完成后【读取参数】,如果校准成功,点击【保存校准】,以后上电不用再校准。
切换到运行调试界面,【闭环模式】,设置目标值,观察电机转动。
注意,在有减速机的情况下,双编的 PI 参数,远大于单编时的设置,调参时请注意。
7.3、霍尔电机B +AB 信号设置

7.3.1、Hall 接口
Hall 信号接 1#SPI 接口, Ha /SCK,Hb/MISO,Hc/MOSI。
板子背面有 3V3 和 5V 的跳线,默认短接 3V3。如果有霍尔传感器必须用 5V 供电,可以短接 5V,同时断开 3V3(注意,5V 和 3V3 不能同时短接)。如果霍尔信号须接上拉电阻,R10、R11、R12 焊接 3.3K 电阻(默认不焊接)。
7.3.2、AB 接口
ABZ 接口可接磁编码器或光栅编码器的 AB 或 ABZ 接口。既可以接电机轴的 AB 编码器,也可以接输出轴的 AB 编码器。
板子背面有 3V3 和 5V 的跳线,默认短接 3V3。如果有光栅编码器必须用 5V 供电,可以短接 5V,同时断开 3V3(注意,5V 和 3V3 不能同时短接)。
对于差分 AB 信号,只接 A+、B+即可。
7.3.3、参数配置

7.3.4、操作流程
保存参数后【校准电机】,hall 电机校准时间稍长,请耐心等待。校准完成后【读取参数】,如果校准成功,点击【保存校准】,以后上电不用再校准。
切换到运行调试界面,【闭环模式】,设置目标值,观察电机转动。
八、固件升级
升级前请认真核对驱动器型号和固件版本。为防止误操作,点击【DownLoad】后需要
输入密码:168。

店铺:俱瓷科技

















 5081
5081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









