






基于本人电脑老是抽风,至今已重装十几次,遂写此文帮助自己快速完成重装,进入工作状态。目前包含星火商店,显卡驱动,编译器安装,ros,anaconda等等内容,希望能帮到你。
大家在装系统的时候遇到各种问题不要着急,停下来休息休息先,失败是常有的事,保持平常心,才能事半功倍哦!
网盘里面有部分要下载的文件(没会员很多文件装不进去了,自己下吧,链接应该都给出来了)
链接: https://pan.baidu.com/s/1OigOnp6JXuEvPq9STZlM9A?pwd=0609 提取码: 0609
(原先的编译器安装不让放,丢另一篇文章里面了(悲))
目录
准备阶段
1.准备一个大小在4g以上的u盘
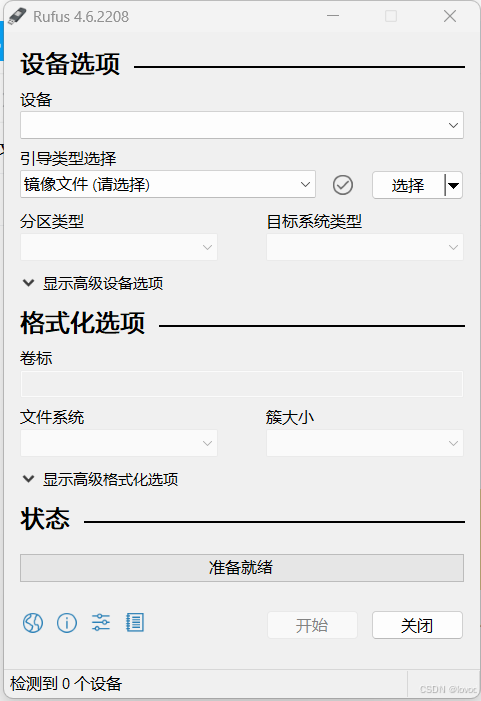
2.系统盘的安装不过多介绍,网上下载ubuntu的镜像,使用rufus制作即可。
3.推荐准备至少150g的空间,右击win打开磁盘管理压缩卷。

4.在开机时狂按F2(不同电脑按键不同)进入bios模式,关闭安全模式(Secure Boot)。
ok,准备阶段就此结束,现在让我们来开始着手安装把!
开始安装
这一步忘了拍照,不过难度不大,大部分都是保持默认的
1.插入安装盘重启,开机的时候狂按F12,然后选择自己的安装盘进入。
2.语言和键盘布局根据本人需求选择(这里我选了中文和US的键盘)
3.选择正常安装
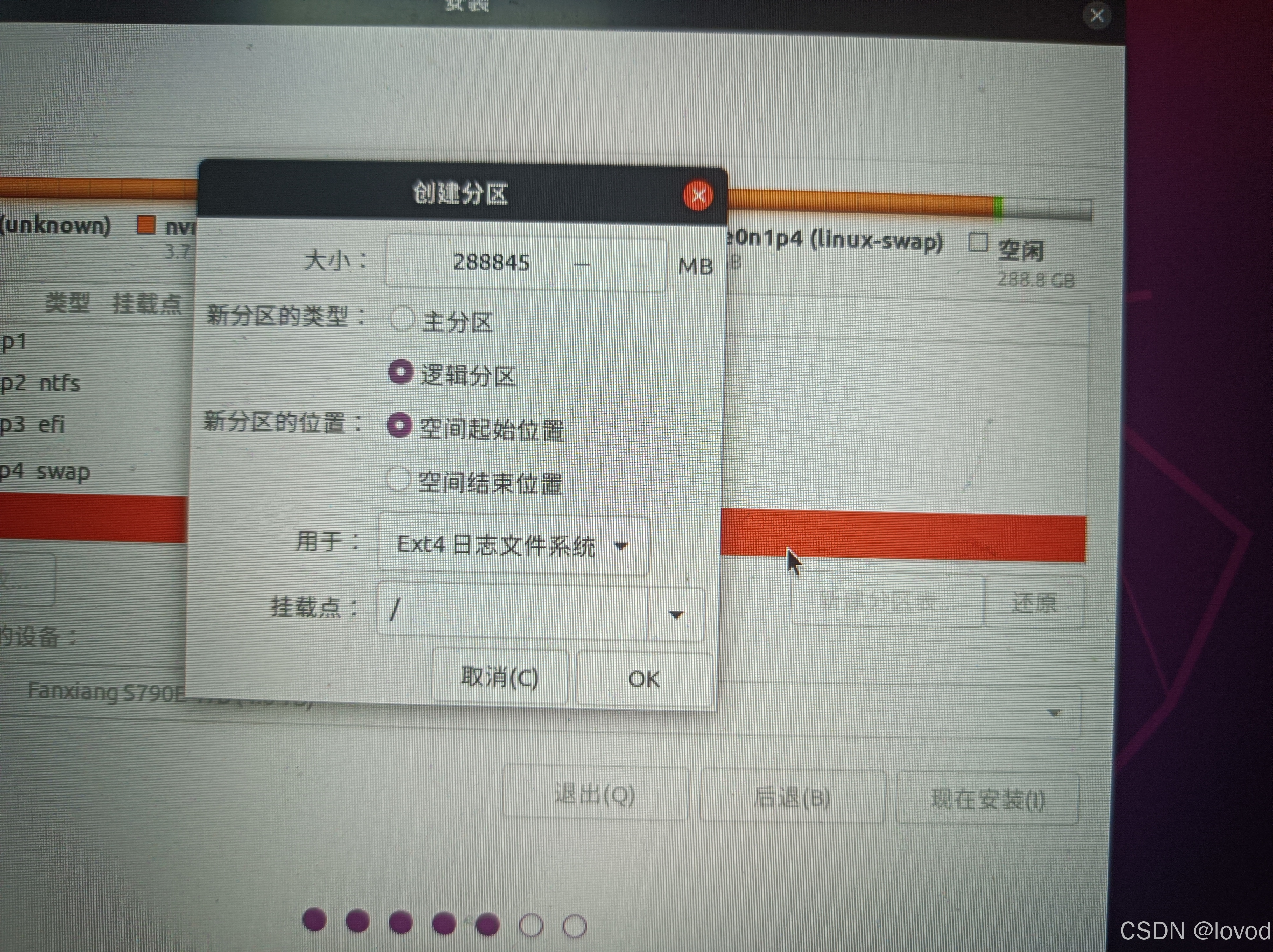
4.安装类型选其他选项,然后开始选择分区
点击空白分区,然后按下“+”进行分配
| efi | 512m |
| swap | 和自己电脑运行内存一样大即可 |
| / | 剩下的全部 |
均选择逻辑分区,按照上面的表格输入分配内存大小
(其实home分区也是可以设置的(这里单纯就是懒),需要的话和/分区五五开即可。)
5.用户名什么的都随便,密码最好设置短一点,其他的没什么特别
好的,当你走到这一步,恭喜你已经完成了ubuntu的安装!!!完结撒花
不知道叫什么之大杂烩
网卡驱动
当你第一次装好系统的时候,可能会发现你的网络是丢失状态,那么大概率是没有装上网卡驱动。
这里仅介绍我的电脑的网卡驱动安装。
首先确认自己的网卡型号:Realtek RTL8852BE。(可通过Windows设备管理器查看网卡型号)
因为接下来的过程需要下载,所以要先用usb连接手机共享网络。
1.安装驱动工具
sudo apt-get update
sudo apt-get install make gcc linux-headers-$(uname -r) build-essential git2.安装驱动
注意!!!每个人电脑支持的网卡驱动是不同的,我这里没有深入研究,如果你的网卡型号和我不同,建议找找其他文章
git clone https://github.com/HRex39/rtl8852be.git
cd rtl8852be
make -j8
sudo make install3.加载驱动
sudo modprobe 8852be不出意外的话wifi的图标就出现啦!

补充:如果后面出现wifi图标消失的情况:
cd ~/rtl8852be
make clean
make -j8
sudo make install
sudo modprobe 8852be蓝牙驱动
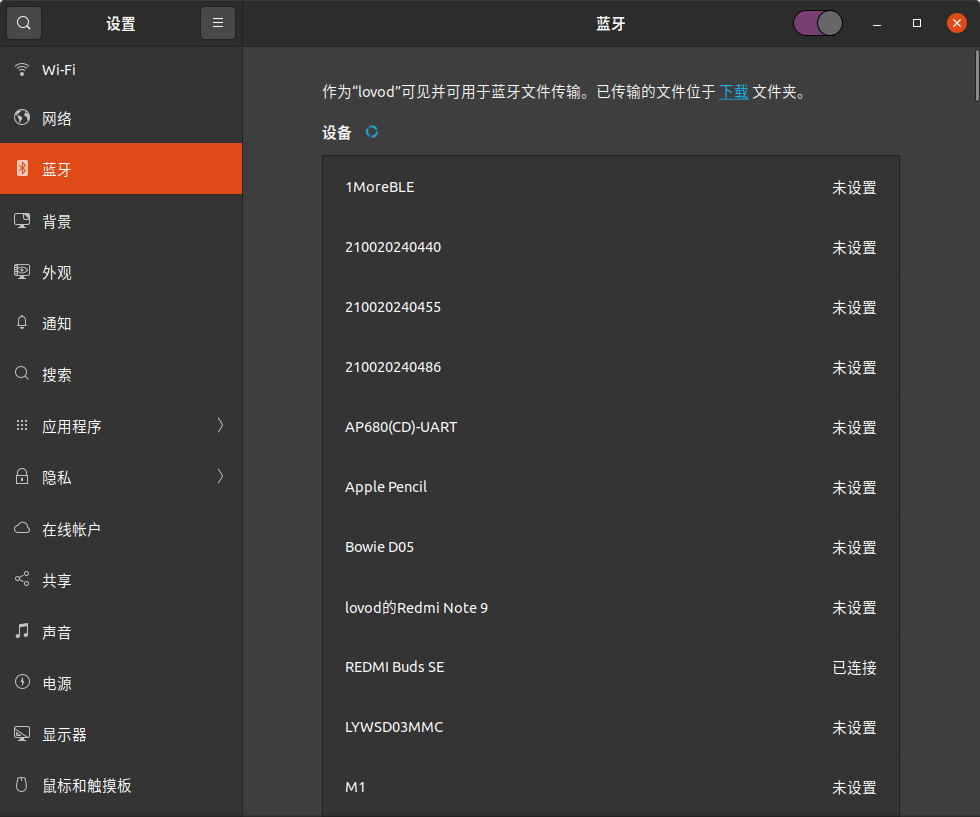
当你掏出你的蓝牙耳机,却发现搜索栏空空如也时。
大概率和上面一样是蓝牙驱动没装(放网盘里,注意型号)。
cd rtl8852be_bt-5.15
make
sudo make install接着重启电脑就可以了
安装必要工具
sudo apt install vim
sudo apt install ssh
sudo apt install cmake
sudo apt install git
sudo apt install python3-pip
sudo pip3 install -U catkin_tools
亮度调节
sudo vim /etc/default/grub
找到“GRUB_CMDLINE_LINUX=”
按“i”进入编辑模式
在=后面加上"acpi_backlight=vendor"
然后按下esc退出编辑模式,按下:wq保存退出
sudo update-grub 更新grub
最后重启即可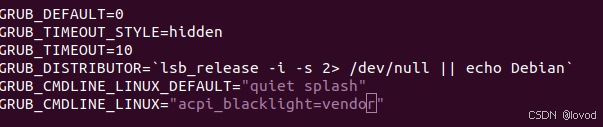 星火商店
星火商店
这不是必须的,但下了你会很爽
拉取和解压
wget https://zunyun01.store.deepinos.org.cn/spark-store-dependencies-kylin.zip
unzip spark-store-dependencies-kylin.zip
cd spark-store-dependencies-kylin/
tar xvf 解压我.tar
安装依赖
cd all-depends/Debian10-or-ubuntu-20.04/
sudo apt update
sudo apt install -yf ./*.deb
之后从官网下载软件包
apt-get install -y 安装包.deb哈哈哈,到这步有了截图工具后面图片就好处理啦
显卡驱动
首先查看自己显卡支持的显卡驱动
sudo apt update
ubuntu-drivers devices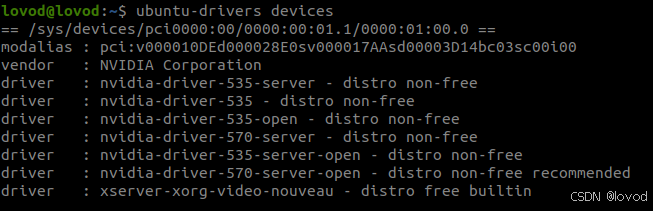 这里推荐直接从”软件与更新“下载,其他的方法容易出事(选择没有test,server的版本即可)
这里推荐直接从”软件与更新“下载,其他的方法容易出事(选择没有test,server的版本即可)

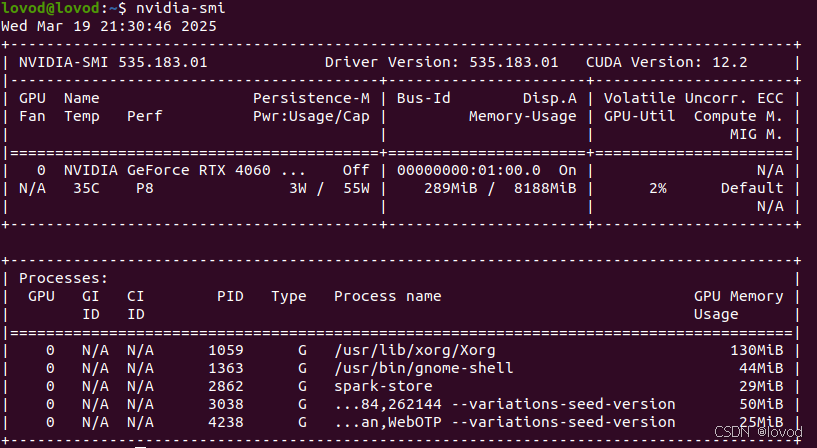
终端输入
nvidia-smi输出如下就证明成功了
CUDA
从nvidia-smi的输出查看CUDA的支持版本
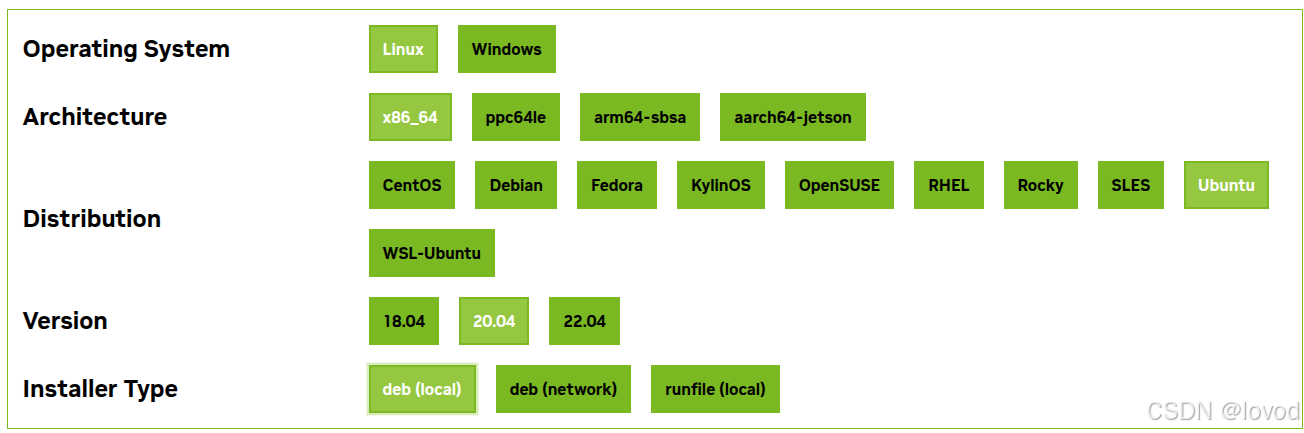
从官网下载对应版本,这里以CUDA11.8为例
 下载有点慢,不要着急,听几首歌就好了
下载有点慢,不要着急,听几首歌就好了
下载好之后编辑环境变量
sudo gedit ~/.bashrc
把下面几行写进去
export PATH=$PATH:/usr/local/cuda/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda/lib64
export LIBRARY_PATH=$LIBRARY_PATH:/usr/local/cuda/lib64在终端输入source ~/.bashrc或者重新启终端使之生效。
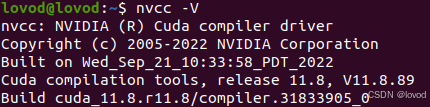
之后在终端输入nvcc -V查看CUDA的安装信息,如下图所示则CUDA安装成功。
CUDNN
老规矩,官网下载,选择cuda对应的版本
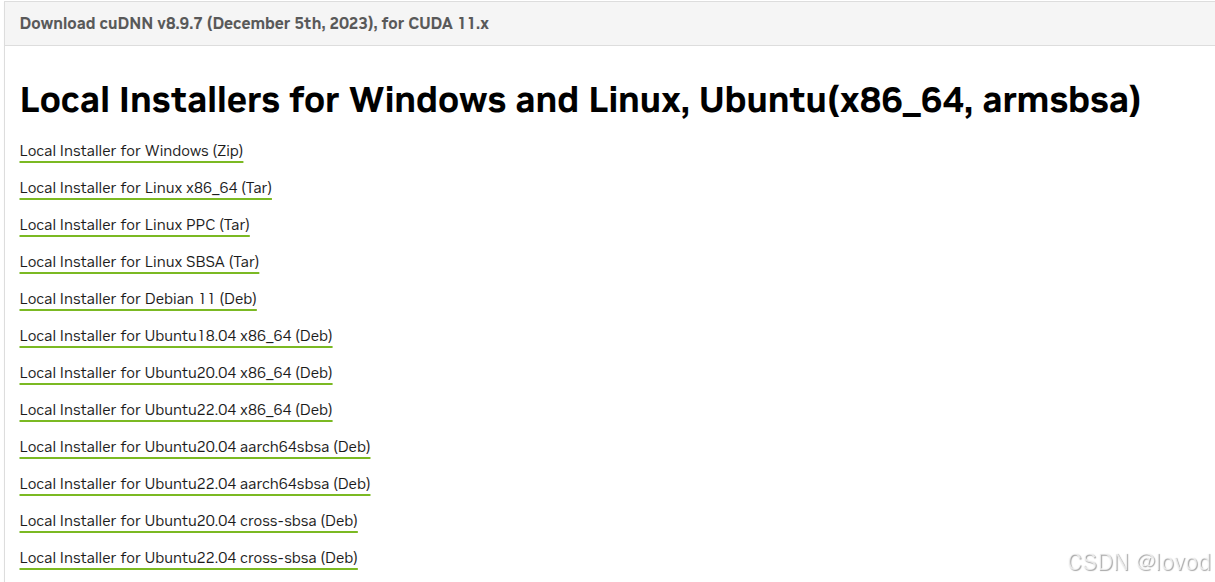
登录后会自动下载
tar -xvf 对应的压缩文件
打开压缩文件
注意更换版本号
sudo cp include/cudnn.h /usr/local/cuda-11.8/include
sudo cp lib/libcudnn* /usr/local/cuda-11.8/lib64
sudo chmod 777 /usr/local/cuda-11.8/include/cudnn.h
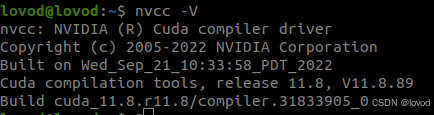
sudo chmod 777 /usr/local/cuda-11.8/lib64/libcudnn*通过在终端输入nvcc -V验证
ROS
通过这个网站下载
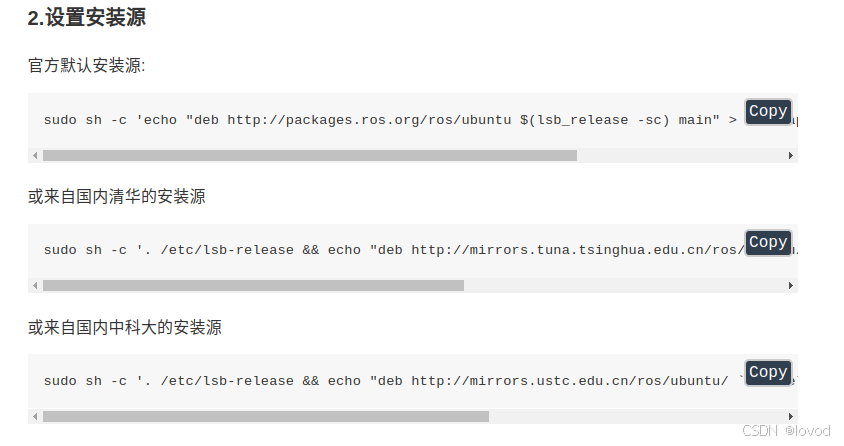 推荐使用国内源,速度会快不少
推荐使用国内源,速度会快不少
 可能会因为网络问题导致下载失败,还是那句话,别着急,多试几次就好
可能会因为网络问题导致下载失败,还是那句话,别着急,多试几次就好
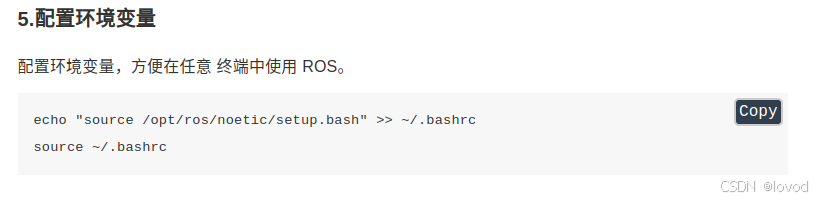
下载好了就配置环境变量
 现在来做个测试
现在来做个测试
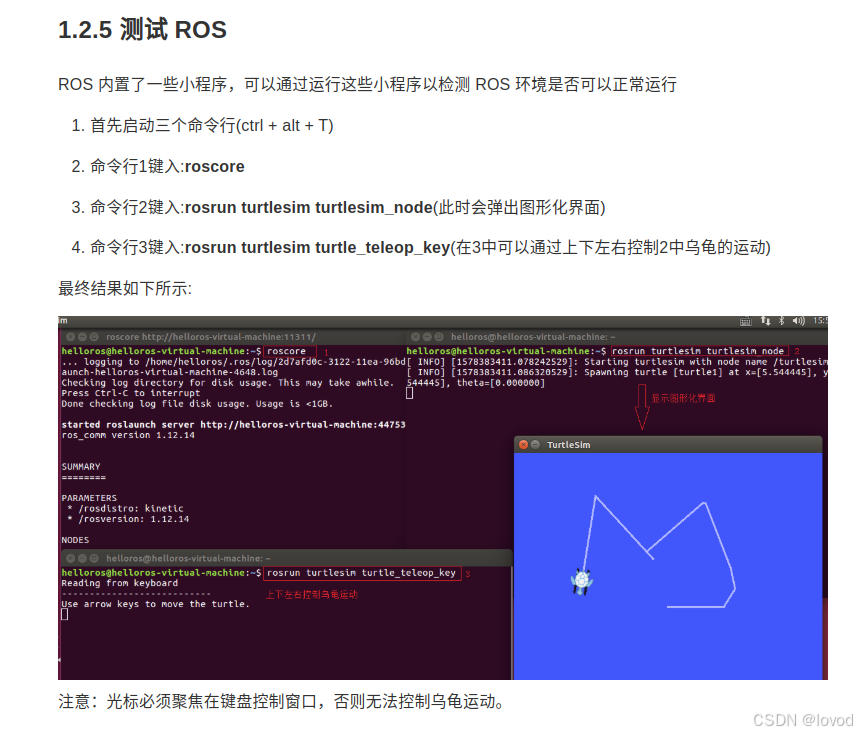
当你来到这里,那么恭喜你!你已经完成了ros的下载了,真的是太棒啦!
Anaconda
官网下载捏,然后到邮箱进入下载链接
用sh或者bash启动下载的anaconda文件,然后按照指示操作(下载这一步不要加sudo,不然会下到root那里去的),重新打开终端,如果出现了(base),证明下载成功

如果不想要自启动base环境,也可以通过下面的命令取消
conda config --set auto_activate_base false当我们成功的下载好了anaconda,就一起来进行第一个虚拟环境的搭建吧
激活base环境
conda activate base
创建虚拟环境(Python版本号自己选择)
conda create -n 名字 python=3.8.10开个新终端,输入conda activate 名字,已验证是否创建成功
Pytorch
老规矩啦,官网下载,选择自己需要的版本(在anaconda虚拟环境里下载)
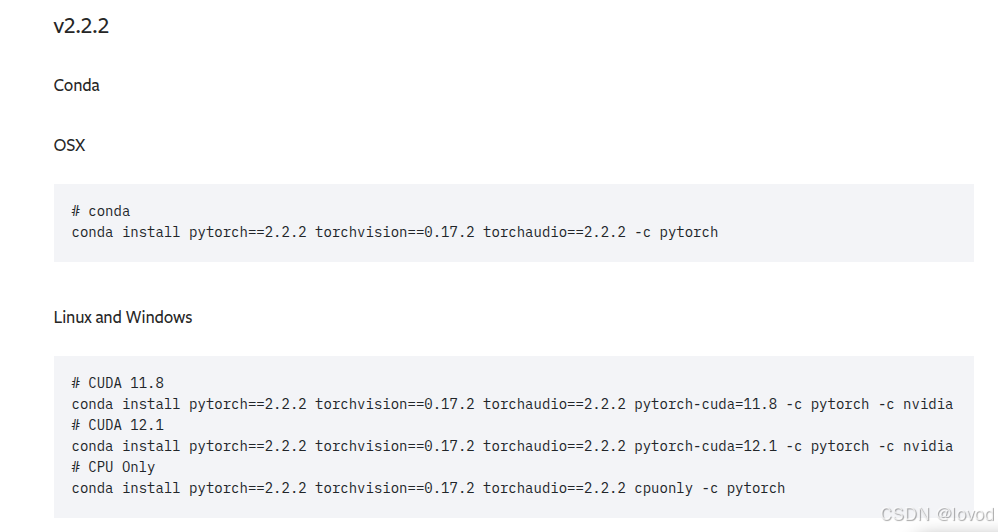
速度比较慢,耐心等待
常用Python库安装
新建一个conda环境的包

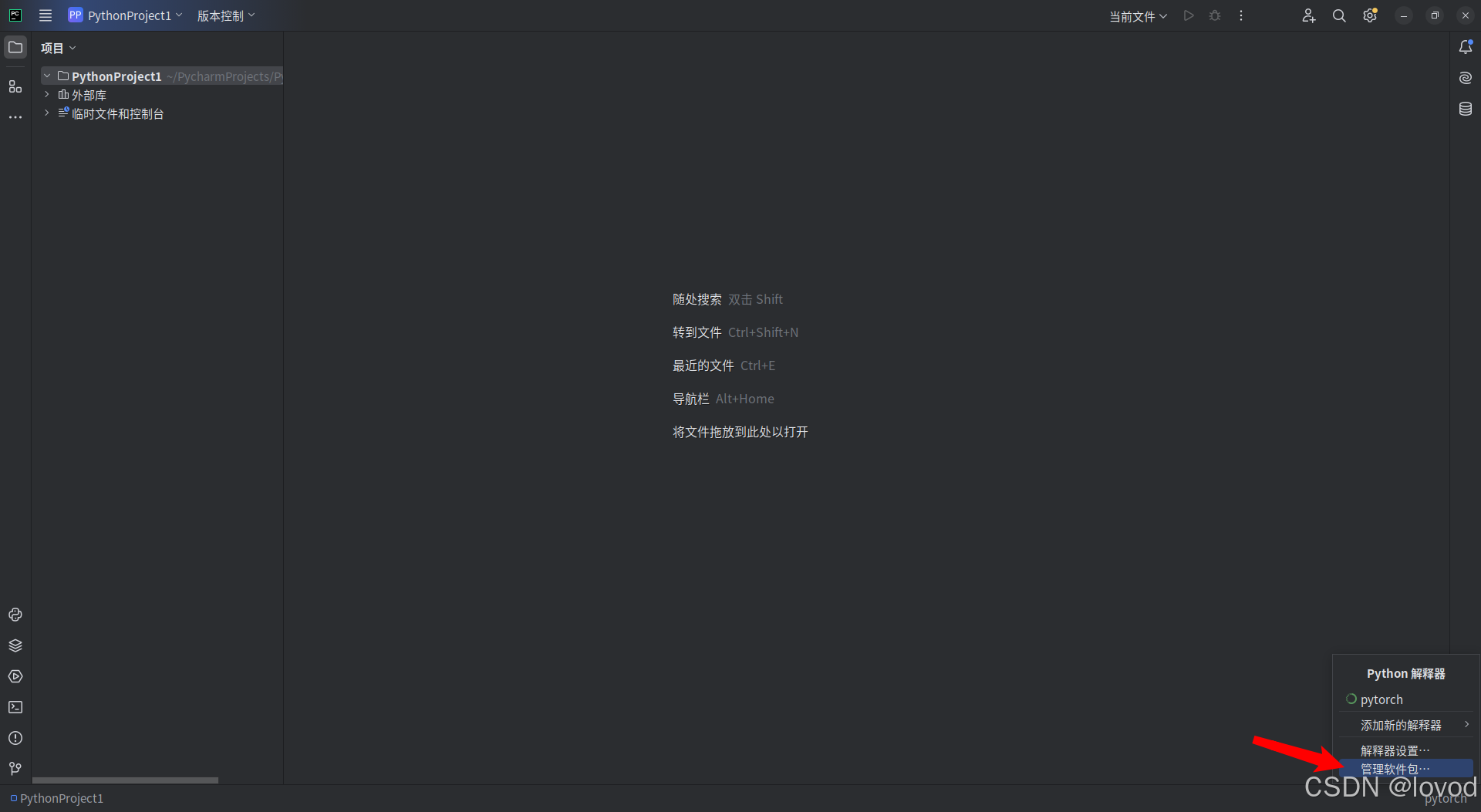 直接搜索下载即可
直接搜索下载即可
或许你需要这个列表:
- numpy
- pandas
- matplotlib
- jupyter
- tensorflow
当然,你也可以使用命令行conda或者pip下载
clash安装
看看官网啦,那么问题来了,下载clash需要github,但是没有clash上不去(死循环了)
实在进不去的话上面的网盘链接里面有
官网的教程很详细,这里就不过多介绍了
网络代理换成手动,如下配置

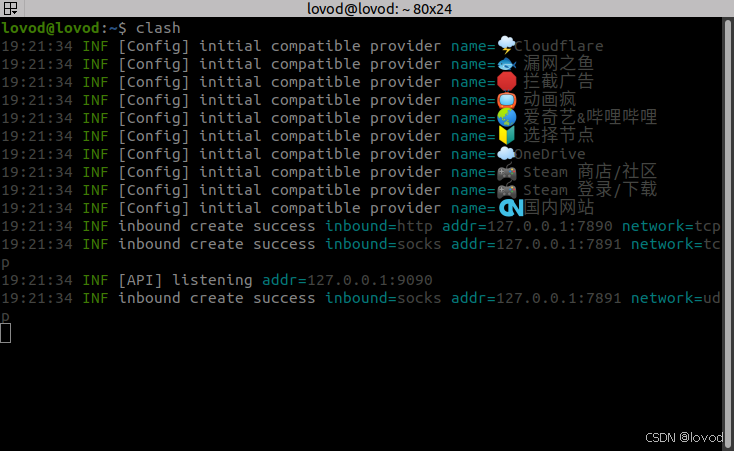
显示如上就是启动成功了,能正常打开github
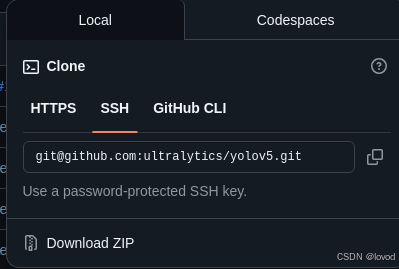
github配置
首先在自己电脑创建一个ssh的key
ssh-keygen -t rsa -C "your_email@example.com"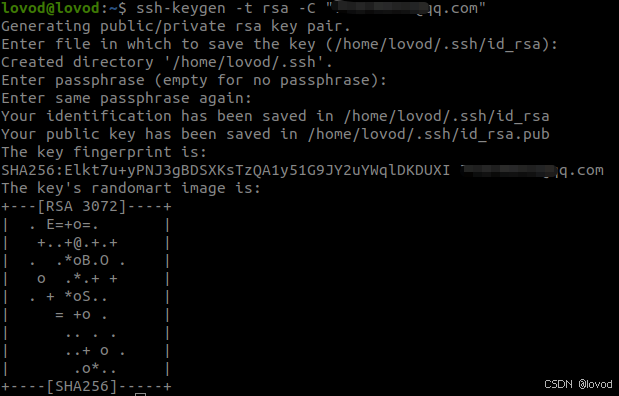
在主文件夹按下ctrl和h显示隐藏文件,找到.ssh文件夹
其中带pub的就是你的公钥,另一个是私钥(不要给别人!!!)
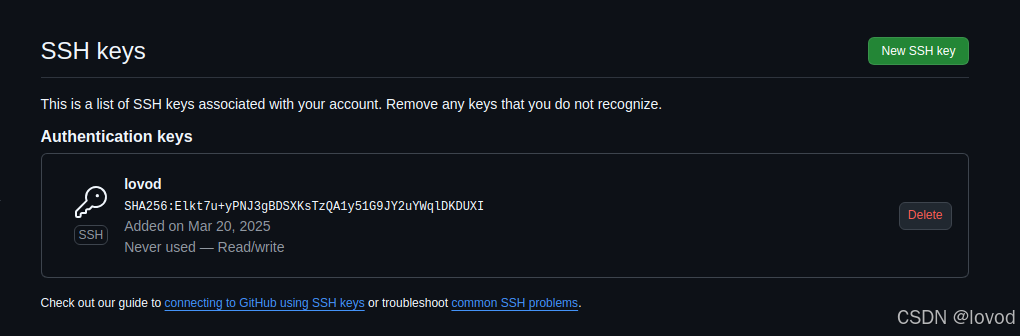
将公钥导入github
现在让我们来测试以下吧
ssh -T git@github.com
如果你发现失败了或者没反应,试试下面这个
ssh -T -p 443 git@github.com
成功了就将下面的内容加入到.ssh文件夹内的config文件
Host github.com
Hostname ssh.github.com
Port 443
User git
如果没找到的就自己建一个
touch config接下来还需要一些小小的配置就大功告成啦(名字和邮箱和github的一样)
git config --global user.name git-name
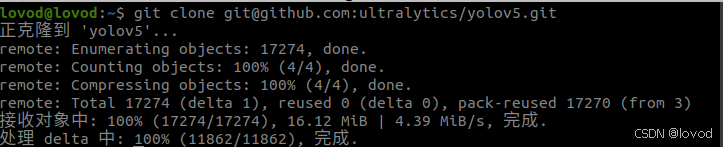
git config --global user.email git-emailclone一个仓库试试
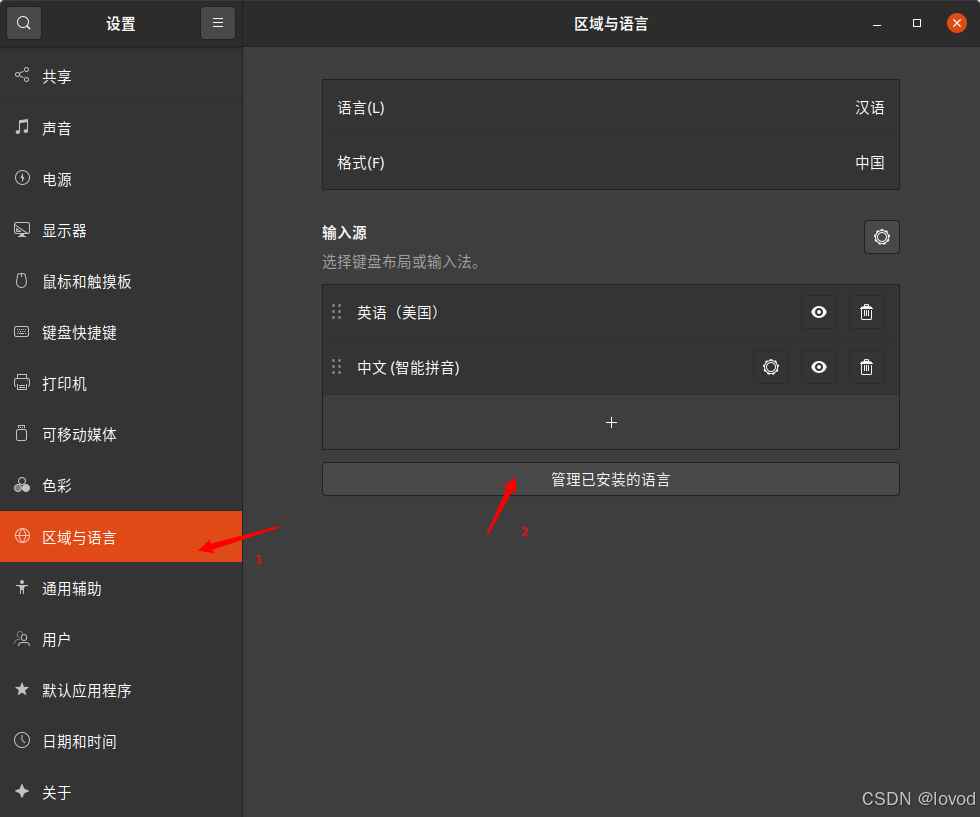
输入法
总所周知,ubuntu自带的输入法是ibus,但是自带的输入法并不好用
首先我们需要先下载fcitx以兼容搜狗输入法,这里推荐直接用星火商店下载,会自动帮我们下载好fcitx,如果你发现用不了,再卸载掉去官网下(这一步主要是用星火直接把fcitx给下了)
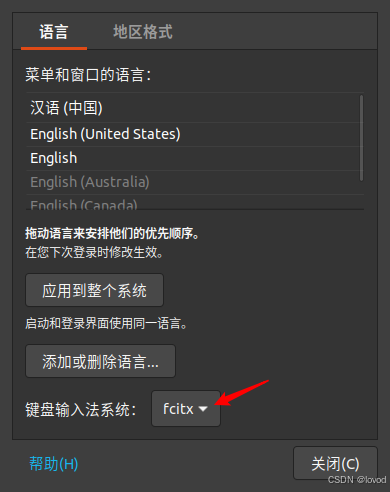
重启之后就可以用了
openvino
官网挂这了,按需选择版本。(这里是第一次安装,稀里糊涂就成功了,没有重装经验,这里只写我尝试的方法,后面要是还重装再来修改,所以谨慎选择)
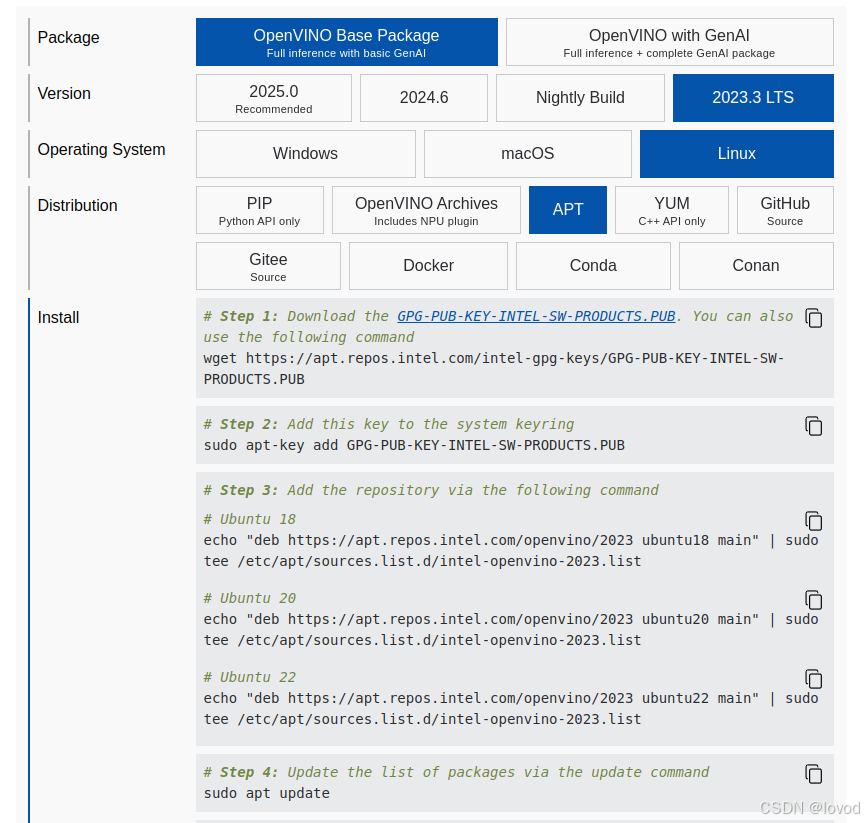
到这里选择需要版本,然后解压后的文件移动到/opt/intel下(没有的话就自己新建)
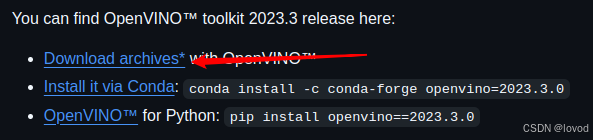
(不会有人看到这还不会解压吧)
tar -xvf 压缩文件.tar
sudo mv "openvino文件所在位置" "/opt/intel"ROS与新版本OpenCV共存
当你拿着新出炉的onnx来到clion,却发现调用不了。

这大概率是因为ros自带的opencv版本太低了,很多onnx无法兼容
先从官网下载需要的版本
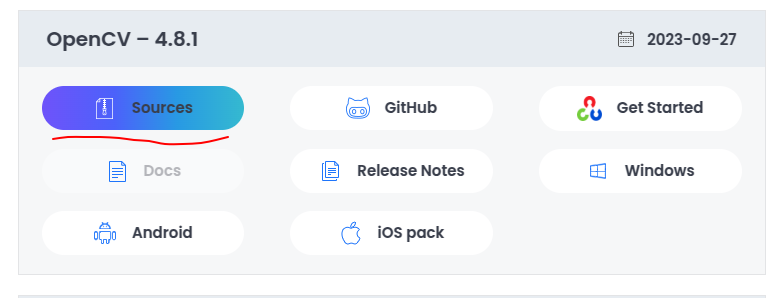
解压后进入文件夹
mkdir build
cd build
mkdir installed
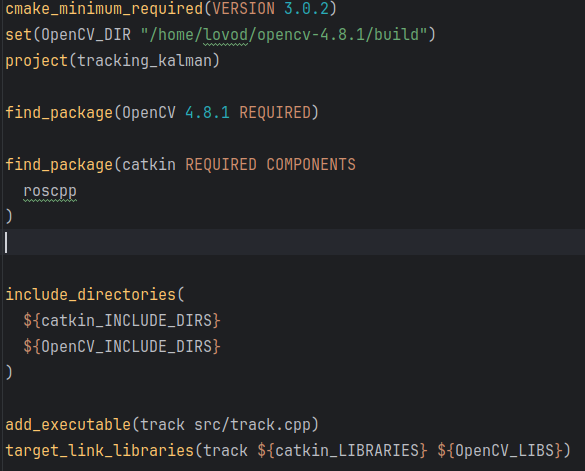
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/home/lovod/opencv-4.8.1/build/installed -D BUILD_DOCS=OFF -D BUILD_EXAMPLES=OFF -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D OPENCV_GENERATE_PKGCONFIG=YES ..
make -j8
sudo make install然后将以下内容写进.bashrc
export PKG_CONFIG_PATH=/home/lovod/opencv-4.8.1/build/installed/lib/pkgconfig
export LD_LIBRARY_PATH=/home/lovod/opencv-4.8.1/build/installed/lib重启终端后输入测试
pkg-config --modversion opencv4cmakelist编写如下
程序测试
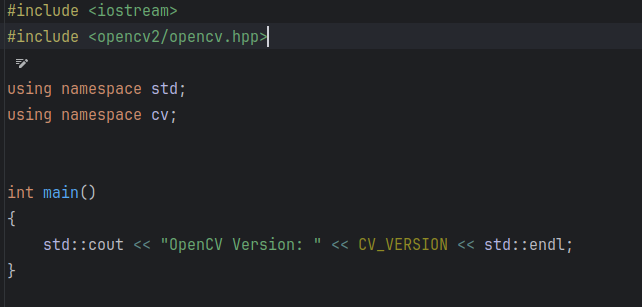

如果你需要在调用onnx的同时,调用ros的cv_bridge来进行图像消息的转换,请移步这篇文章。
结语
好了,到这里就结束了,如果有遗漏会后续补充的,谢谢观看,拜了个拜。

















 2723
2723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









