






PCLVisualizer是PCL中全功能的可视化类。虽然在使用上比CloudViewer更加复杂,但是它功能更加强大,提供了比如显示法线、绘制图形以及多视点等特性。
本篇教程将从显示一个独立点云开始,使用一个示例代码来演示PCLVisualizer的一些功能。大多数代码示例都是样板文件,用于设置可视化的点云。每个示例的相关代码都包含在特定于该示例的函数中。代码如下所示。
/**创建一个视口从 [xmin,ymin] 到 [xmax,ymax].
* 参数 xmin :视口在X轴的最小值 (0.0 <= 1.0)
* 参数 ymin :视口在Y轴的最小值 (0.0 <= 1.0)
* 参数 xmax :视口在X轴的最大值 (0.0 <= 1.0)
* 参数 ymax: 视口在Y轴的最大值 (0.0 <= 1.0)
* 参数 viewport: 新视口的id,传入的是个引用参数
*
* 注意:
*如果当前窗口不存在渲染器,将创建一个,并且*视口将被设置为0 ('all')。如果一个或多个渲染
*器存在,视口ID将被设置为渲染器的总数- 1
*/
void
createViewPort (double xmin, double ymin, double xmax, double ymax, int &viewport);
//简单显示PointXYZ点云,返回一个视窗的shared智能指针
pcl::visualization::PCLVisualizer::Ptr simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
//打开3D视窗并添加点云
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
//设置背景颜色为黑色
viewer->setBackgroundColor(0, 0, 0);
/**
* 为视窗添加点云数据,传入一个字符串ID以便在其他方法中识别这个点云数据
* 可以多次调用addPointCloud()函数以添加多个点云数据,每次都提供一个新的ID
* 如果想更新一个已存在的点云数据,你可以调用removePointCloud(),并传入点云的ID使它能够得到更新
* 在PCL1.1及以上版本中,提供了一个新的API方法:updatePointCloud()
* 使用它就可以直接更新点云,而不用先调用removePointCloud()函数删除再添加
* adddPointCloud()函数有许多重载形式,其他形式可以被用于操作不同类型的点云,显示法线等等
*/
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
//改变渲染点的大小,可以使用此方法在视窗中控制任何点云的渲染方式
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
/**
* 查看复杂的点云常常会使我们失去方向感,为了保证对点云位置的正确判断,可以显示一个坐标系
* 它们是沿着X轴(红色),Y轴(绿色),Z轴(蓝色)的三个圆柱体。圆柱体的大小可以通过传入scale参数控制
* 默认scale=1.0
* 该函数也有重载方法,通过传入坐标(x,y,z)可以设置坐标轴的位置
*/
viewer->addCoordinateSystem(1.0);
//初始化相机参数,使用户从默认的角度观察点云
viewer->initCameraParameters();
return (viewer);
}示例代码及注释:
#include<iostream>
#include<thread>
#include<pcl/common/common_headers.h>
#include<pcl/features/normal_3d.h>
#include<pcl/io/pcd_io.h>
#include<pcl/visualization/pcl_visualizer.h>
#include<pcl/console/parse.h>
using namespace std::chrono_literals;
// ----------------------
// -----打印使用帮助-----
// ----------------------
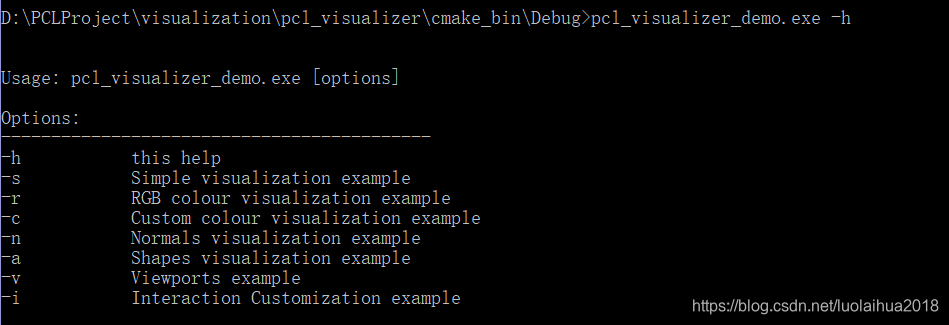
void
printUsage(const char* progName)
{
std::cout << "\n\nUsage: " << progName << " [options]\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-h this help\n"
<< "-s Simple visualization example\n"
<< "-r RGB colour visualization example\n"
<< "-c Custom colour visualization example\n"
<< "-n Normals visualization example\n"
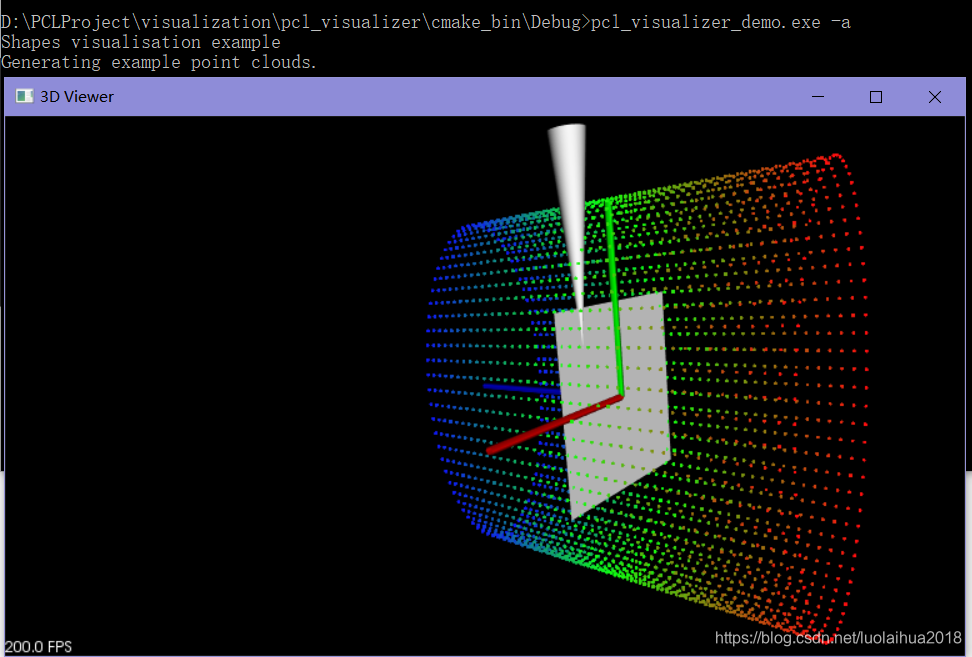
<< "-a Shapes visualization example\n"
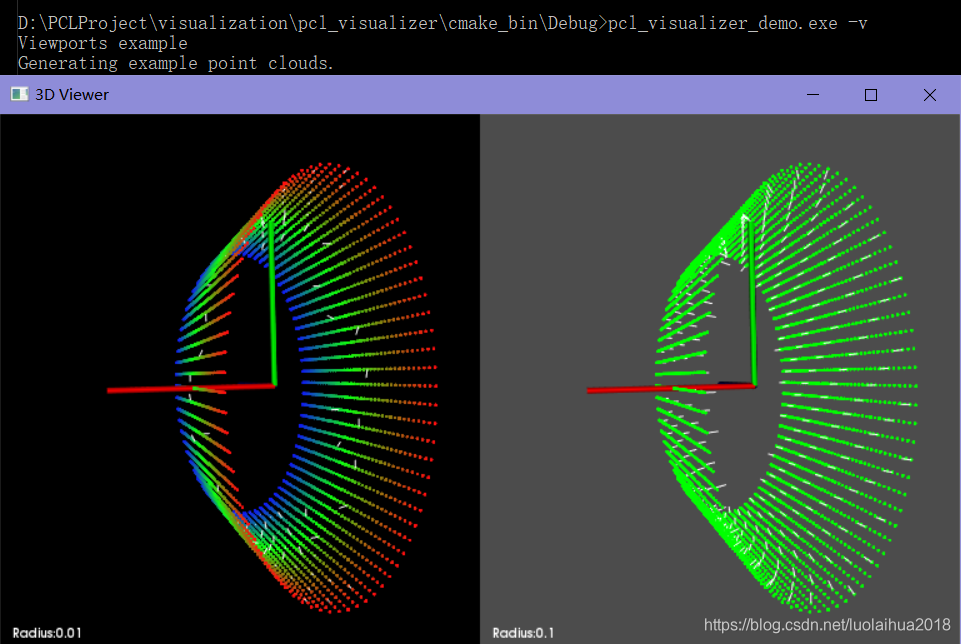
<< "-v Viewports example\n"
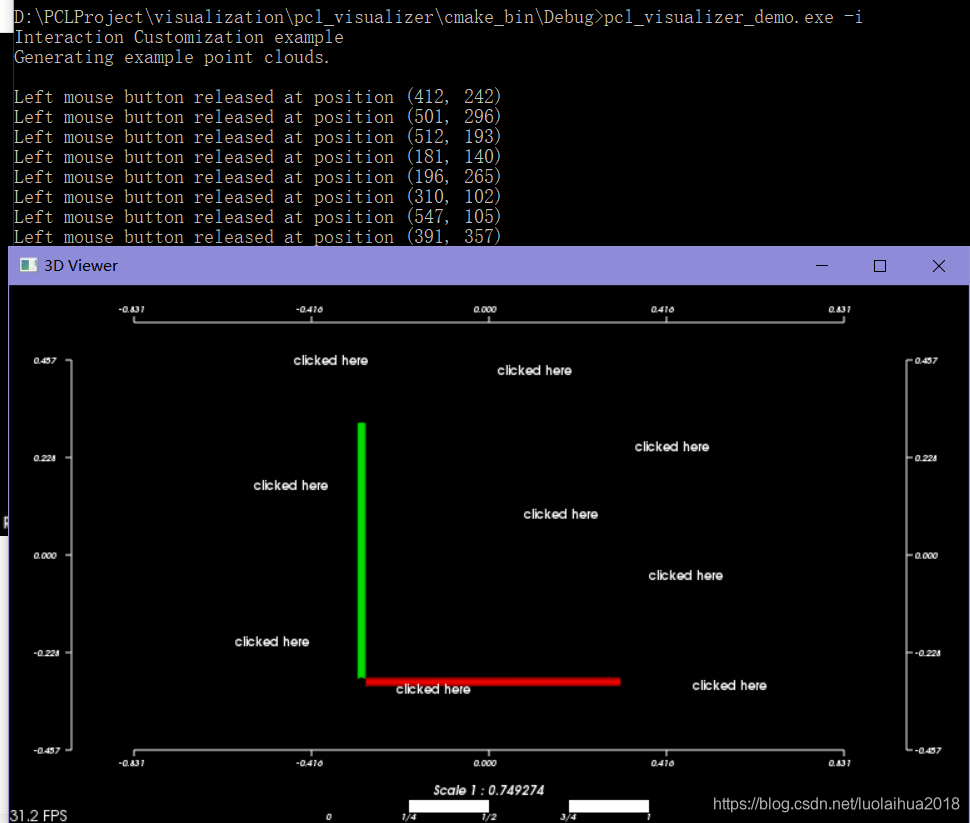
<< "-i Interaction Customization example\n"
<< "\n\n";
}
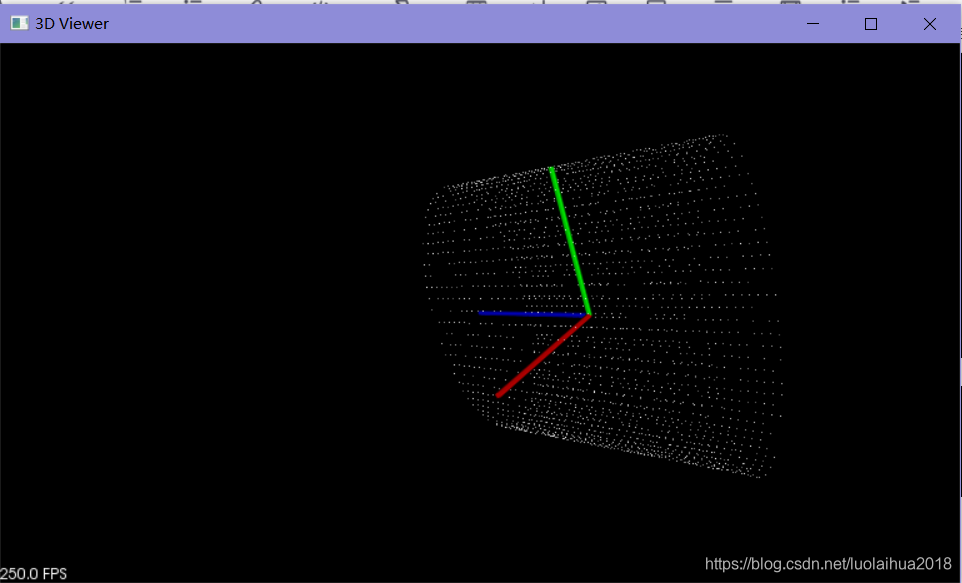
//简单显示PointXYZ点云,返回一个视窗的shared智能指针
pcl::visualization::PCLVisualizer::Ptr simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
//打开3D视窗并添加点云
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
//设置背景颜色为黑色
viewer->setBackgroundColor(0, 0, 0);
/**
* 为视窗添加点云数据,传入一个字符串ID以便在其他方法中识别这个点云数据
* 可以多次调用addPointCloud()函数以添加多个点云数据,每次都提供一个新的ID
* 如果想更新一个已存在的点云数据,你可以调用removePointCloud(),并传入点云的ID使它能够得到更新
* 在PCL1.1及以上版本中,提供了一个新的API方法:updatePointCloud()
* 使用它就可以直接更新点云,而不用先调用removePointCloud()函数删除再添加
* adddPointCloud()函数有许多重载形式,其他形式可以被用于操作不同类型的点云,显示法线等等
*/
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
//改变渲染点的大小,可以使用此方法在视窗中控制任何点云的渲染方式
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
/**
* 查看复杂的点云常常会使我们失去方向感,为了保证对点云位置的正确判断,可以显示一个坐标系
* 它们是沿着X轴(红色),Y轴(绿色),Z轴(蓝色)的三个圆柱体。圆柱体的大小可以通过传入scale参数控制
* 默认scale=1.0
* 该函数也有重载方法,通过传入坐标(x,y,z)可以设置坐标轴的位置
*/
viewer->addCoordinateSystem(1.0);
//初始化相机参数,使用户从默认的角度观察点云
viewer->initCameraParameters();
return (viewer);
}
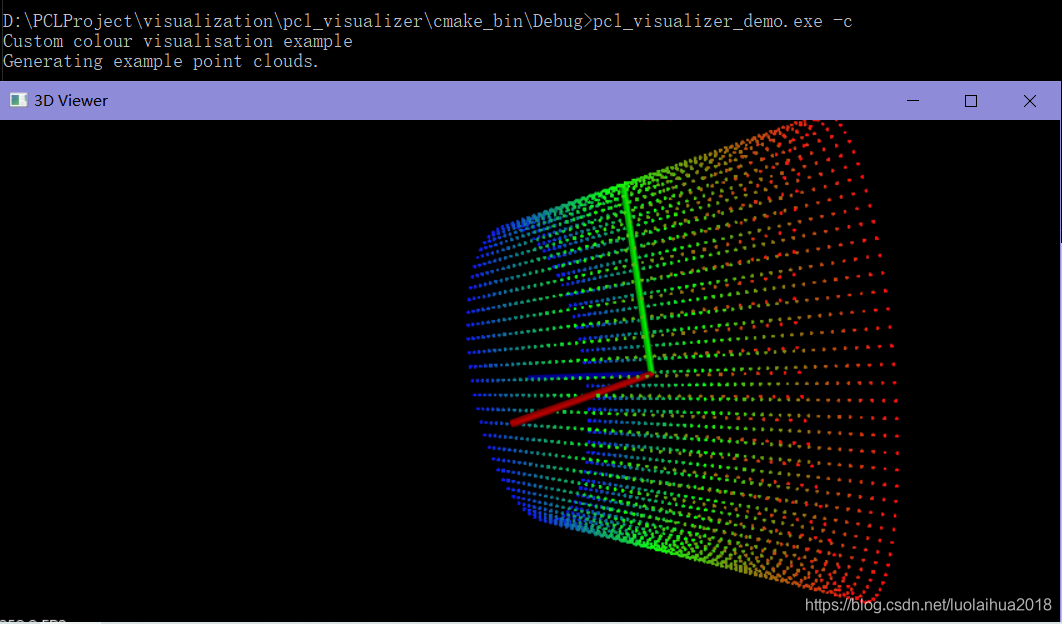
/**
* 通常,使用最多的点云类型是PointXYZRGB类型,而不是PointXYZ,它还包含了颜色信息
* 撇开这个不讲,你也希望通过颜色标注一些特别的点云,使它在视窗中具有辨认性
* PCLVisualizer提供这样的性能,为包含颜色信息的点云提供显示,或者为点云分配色彩
* 在很多设备中,比如Microsoft Kinect ,都可以产生RGB点云数据
* PCLVisualizer可以为每个点云着色并显示
*/
//显示rgb点云
pcl::visualization::PCLVisualizer::Ptr rgbVis(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud)
{
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
// 如果点云中没有RGB字段,PCLVisualizer就不知道使用什么颜色
// 点类型不一定需要PointRGB类型,只要它有三个颜色字段即可
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
return (viewer);
}
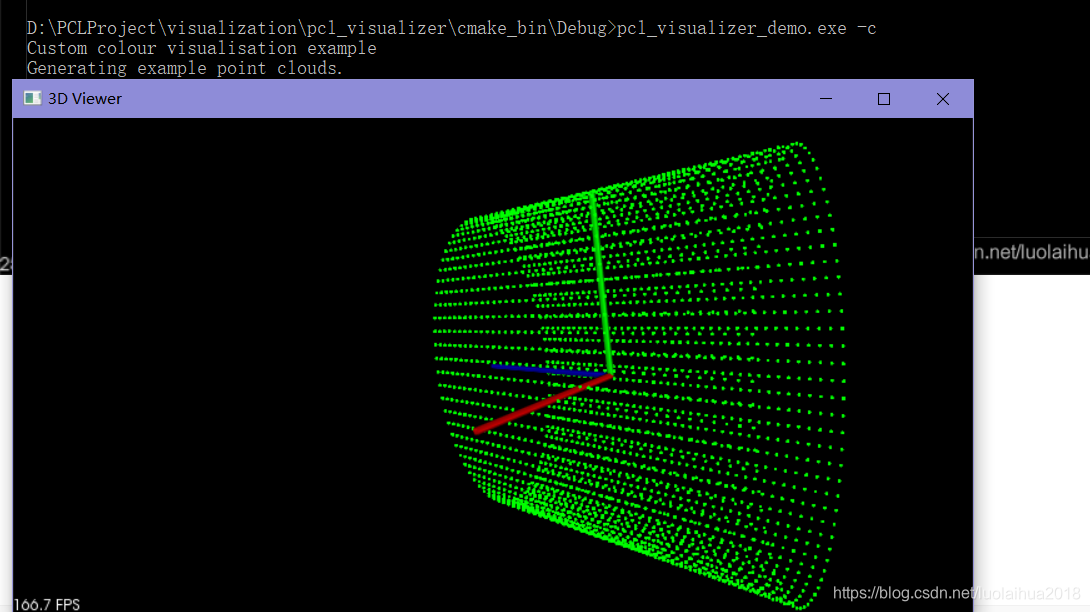
//
pcl::visualization::PCLVisualizer::Ptr customColorVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 0, 255, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
return (viewer);
}
pcl::visualization::PCLVisualizer::Ptr normalsVis(
pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud,
pcl::PointCloud<pcl::Normal>::ConstPtr normals
)
{
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
//可以传入一个颜色控制器
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, rgb, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
return (viewer);
}
pcl::visualization::PCLVisualizer::Ptr shapesVis(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud)
{
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, rgb, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
//---------------------------------------
//-----Add shapes at other locations-----
//---------------------------------------
pcl::ModelCoefficients coeffs;
coeffs.values.push_back(0.0);
coeffs.values.push_back(0.0);
coeffs.values.push_back(1.0);
coeffs.values.push_back(0.0);
/** Add a plane from a set of given model coefficients
* \param[in] coefficients the model coefficients (a, b, c, d with ax+by+cz+d=0)
* \param[in] id the plane id/name (default: "plane")
* \param[in] viewport (optional) the id of the new viewport (default: 0)
*
* \code
* // The following are given (or computed using sample consensus techniques)
* // See SampleConsensusModelPlane for more information
* // Eigen::Vector4f plane_parameters;
*
* pcl::ModelCoefficients plane_coeff;
* plane_coeff.values.resize (4); // We need 4 values
* plane_coeff.values[0] = plane_parameters.x ();
* plane_coeff.values[1] = plane_parameters.y ();
* plane_coeff.values[2] = plane_parameters.z ();
* plane_coeff.values[3] = plane_parameters.w ();
*
* addPlane (plane_coeff);
bool
addPlane (const pcl::ModelCoefficients &coefficients,
const std::string &id = "plane",
int viewport = 0);
*/
viewer->addPlane(coeffs, "plane");
coeffs.values.clear();
coeffs.values.push_back(0.3);
coeffs.values.push_back(0.3);
coeffs.values.push_back(0.0);
coeffs.values.push_back(0.0);
coeffs.values.push_back(1.0);
coeffs.values.push_back(0.0);
coeffs.values.push_back(5.0);
viewer->addCone(coeffs, "cone");
return (viewer);
}
//************************************
// Method: 传入三个const指针,返回一个PCLVisualizer指针
// 通过不同的视口(ViewPort)绘制多个点云
// 利用不同的搜索半径,基于同一点云计算出对应不同半径的两组法线
// Returns: pcl::visualization::PCLVisualizer::Ptr
// Parameter: pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud
// Parameter: pcl::PointCloud<pcl::Normal>::ConstPtr normals1
// Parameter: pcl::PointCloud<pcl::Normal>::ConstPtr normals2
//************************************
pcl::visualization::PCLVisualizer::Ptr viewportsVis(
pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud,
pcl::PointCloud<pcl::Normal>::ConstPtr normals1,
pcl::PointCloud<pcl::Normal>::ConstPtr normals2)
{
// --------------------------------------------------------
// ----------------打开3D视窗,添加点云和法线--------------
// --------------------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
//使用默认值初始化相机参数
viewer->initCameraParameters();
int v1(0);
//创建视口
/**创建一个视口从 [xmin,ymin] 到 [xmax,ymax].
* 参数 xmin :视口在X轴的最小值 (0.0 <= 1.0)
* 参数 ymin :视口在Y轴的最小值 (0.0 <= 1.0)
* 参数 xmax :视口在X轴的最大值 (0.0 <= 1.0)
* 参数 ymax: 视口在Y轴的最大值 (0.0 <= 1.0)
* 参数 viewport : 新视口的id,传入的是个引用参数
*
* 注意:
*如果当前窗口不存在渲染器,将创建一个,并且*视口将被设置为0 ('all')。如果一个或多个渲染
*器存在,视口ID将被设置为渲染器的总数- 1
*/
viewer->createViewPort(0.0, 0.0, 0.5, 1.0, v1);
//设置viewport的背景颜色,第四个参数为指定视口的id,如果不输入,默认为全部视口设置背景颜色
//setBackgroundColor(const double &r, const double &g, const double &b, int viewport = 0);
viewer->setBackgroundColor(0, 0, 0, v1);
//为视口添加文本,添加文本有许多重载函数,可以设置颜色字体等属性
/*
addText (const std::string &text,
int xpos, int ypos,
const std::string &id = "", int viewport = 0);
*/
viewer->addText("Radius:0.01", 10, 10, "v1 text", v1);
//创建一个颜色处理器
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
//为指定的viewport加入点云,颜色处理器,
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, rgb, "sample cloud1", v1);
int v2(0);
viewer->createViewPort(0.5, 0.0, 1.0, 1.0, v2);
viewer->setBackgroundColor(0.3, 0.3, 0.3, v2);
viewer->addText("Radius:0.1", 10, 10, "v2 text", v2);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZRGB> single_color(cloud, 0, 255, 0);
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, single_color, "sample cloud2", v2);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud1");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud2");
viewer->addCoordinateSystem(1.0);
//为点云添加法线,指定viewport显示
viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal>(cloud, normals1, 10, 0.05, "normals1", v1);
viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal>(cloud, normals2, 10, 0.05, "normals2", v2);
return (viewer);
}
unsigned int text_id = 0;
void KeyboardEventOccurred(const pcl::visualization::KeyboardEvent &event,
void* viewer_void)
{
pcl::visualization::PCLVisualizer *viewer = static_cast<pcl::visualization::PCLVisualizer *> (viewer_void);
if (event.getKeySym() == "r" && event.keyDown())
{
std::cout << "r was pressed => removing all text" << std::endl;
char str[512];
for (unsigned int i = 0; i < text_id; ++i)
{
sprintf(str, "text#%03d", i);
}
text_id = 0;
}
}
void mouseEventOccurred(const pcl::visualization::MouseEvent &event, void *viewer_void)
{
pcl::visualization::PCLVisualizer *viewer = static_cast<pcl::visualization::PCLVisualizer*> (viewer_void);
if (event.getButton() == pcl::visualization::MouseEvent::LeftButton &&
event.getType() == pcl::visualization::MouseEvent::MouseButtonRelease)
{
std::cout << "Left mouse button released at position (" << event.getX() << ", "
<< event.getY() << ")" << std::endl;
char str[512];
sprintf(str, "text#%03d", text_id++);
viewer->addText("clicked here", event.getX(), event.getY(), str);
}
}
pcl::visualization::PCLVisualizer::Ptr interactionCustomizationVis()
{
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addCoordinateSystem(1.0);
/**
* /** 为键盘事件注册一个回调函数
* callback 传入一个函数指针,这个函数将成为键盘事件的回调函数
* cookie 传入的用户数据,用无类型指针表示
* return 返回一个连接对象,可以通过这个对象断开回调函数.
inline boost::signals2::connection
registerKeyboardCallback(void(*callback) (const pcl::visualization::KeyboardEvent&, void*), void* cookie = NULL)
{
return (registerKeyboardCallback(boost::bind(callback, _1, cookie)));
}
*/
viewer->registerKeyboardCallback(KeyboardEventOccurred, (void*)viewer.get());
viewer->registerMouseCallback(mouseEventOccurred, (void*)viewer.get());
return (viewer);
}
// ----------------
// -----主函数-----
// ----------------
int
main(int argc, char** argv)
{
// --------------------------------------
// ----------命令行参数解析--------------
// --------------------------------------
if (pcl::console::find_argument(argc, argv, "-h") >= 0)
{
printUsage(argv[0]);
return 0;
}
bool simple(false), rgb(false), custom_c(false), normals(false),
shapes(false), viewports(false), interaction_customization(false);
if (pcl::console::find_argument(argc, argv, "-s") >= 0)
{
simple = true;
std::cout << "Simple visualisation example\n";
}
else if (pcl::console::find_argument(argc, argv, "-c") >= 0)
{
custom_c = true;
std::cout << "Custom colour visualisation example\n";
}
else if (pcl::console::find_argument(argc, argv, "-r") >= 0)
{
rgb = true;
std::cout << "RGB colour visualisation example\n";
}
else if (pcl::console::find_argument(argc, argv, "-n") >= 0)
{
normals = true;
std::cout << "Normals visualisation example\n";
}
else if (pcl::console::find_argument(argc, argv, "-a") >= 0)
{
shapes = true;
std::cout << "Shapes visualisation example\n";
}
else if (pcl::console::find_argument(argc, argv, "-v") >= 0)
{
viewports = true;
std::cout << "Viewports example\n";
}
else if (pcl::console::find_argument(argc, argv, "-i") >= 0)
{
interaction_customization = true;
std::cout << "Interaction Customization example\n";
}
else
{
printUsage(argv[0]);
return 0;
}
// ------------------------------------
// ----------创建示例点云数据----------
// ------------------------------------
pcl::PointCloud < pcl::PointXYZ > ::Ptr basic_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
std::cout << "Generating example point clouds.\n\n";
/*
* 创建一个向z轴挤压的椭圆,颜色由按红绿蓝的顺序渐变
*/
std::uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZ basic_point;
basic_point.x = 0.5*std::cos(pcl::deg2rad(angle));
basic_point.y = sinf(pcl::deg2rad(angle));
basic_point.z = z;
basic_cloud_ptr->points.push_back(basic_point);
pcl::PointXYZRGB point;
point.x = basic_point.x;
point.y = basic_point.y;
point.z = basic_point.z;
std::uint32_t rgb = (static_cast<std::uint32_t>(r) << 16 | static_cast<std::uint32_t>(g) << 8
| static_cast<std::uint32_t>(b));
//将rgb的数据保存在一个浮点数
point.rgb = *reinterpret_cast<float*> (&rgb);
point_cloud_ptr->points.push_back(point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
basic_cloud_ptr->width = basic_cloud_ptr->size();
basic_cloud_ptr->height = 1;//无序点云
point_cloud_ptr->width = point_cloud_ptr->size();
point_cloud_ptr->height = 1;
// ----------------------------------------------------------------
// ----------------以搜索半径0.05计算表面法线----------------------
// ----------------------------------------------------------------
pcl::NormalEstimation<pcl::PointXYZRGB, pcl::Normal> ne;
ne.setInputCloud(point_cloud_ptr);
pcl::search::KdTree<pcl::PointXYZRGB>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZRGB>());
ne.setSearchMethod(tree);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals1(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(0.05);
ne.compute(*cloud_normals1);
// ----------------------------------------------------------------
// ----------------以搜索半径0.1计算表面法线----------------------
// ----------------------------------------------------------------
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals2(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(0.1);
ne.compute(*cloud_normals2);
pcl::visualization::PCLVisualizer::Ptr viewer;
if (simple)
{
viewer = simpleVis(basic_cloud_ptr);
}
else if (rgb)
{
viewer = rgbVis(point_cloud_ptr);
}
else if (custom_c)
{
viewer = customColorVis(basic_cloud_ptr);
}
else if (normals)
{
viewer = normalsVis(point_cloud_ptr, cloud_normals2);
}
else if (shapes)
{
viewer = shapesVis(point_cloud_ptr);
}
else if (viewports)
{
viewer = viewportsVis(point_cloud_ptr, cloud_normals1, cloud_normals2);
}
else if (interaction_customization)
{
viewer = interactionCustomizationVis();
}
//--------------------
// -----Main loop-----
//--------------------
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
std::this_thread::sleep_for(100ms);
}
}代码运行演示:

键盘事件按钮功能:
Help:
-------
p, P : switch to a point-based representation
w, W : switch to a wireframe-based representation (where available)
s, S : switch to a surface-based representation (where available)j, J : take a .PNG snapshot of the current window view
c, C : display current camera/window parameters
f, F : fly to point modee, E : exit the interactor
q, Q : stop and call VTK's TerminateApp+/- : increment/decrement overall point size
+/- [+ ALT] : zoom in/outg, G : display scale grid (on/off)
u, U : display lookup table (on/off)o, O : switch between perspective/parallel projection (default = perspective)
r, R [+ ALT] : reset camera [to viewpoint = {0, 0, 0} -> center_{x, y, z}]
CTRL + s, S : save camera parameters
CTRL + r, R : restore camera parametersALT + s, S : turn stereo mode on/off
ALT + f, F : switch between maximized window mode and original sizel, L : list all available geometric and color handlers for the current actor map
ALT + 0..9 [+ CTRL] : switch between different geometric handlers (where available)
0..9 [+ CTRL] : switch between different color handlers (where available)SHIFT + left click : select a point (start with -use_point_picking)
x, X : toggle rubber band selection mode for left mouse button

















 954
954

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









